一种水下机器人三维动力定位的推力分配优化方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种水下机器人(Autonomous underwater vehicle,简称为AUV)三维动力定位的推力分配优化方法,属于水下机器人运动控制技术领域。
背景技术
水下机器人在近底精细化探测、光学拍照、悬停采样等作业过程中,需要水下机器人本体保持位置和姿态的固定不变,而水下机器人是具有非线性、强时变、强耦合、大时延、多自由度的复杂系统,且水动力参数的冗杂性和受风、浪、流等的随机扰动,使得水下机器人的三维动力定位控制实现困难。因此,水下机器人的动力定位控制技术研究具有重要的实际意义和应用价值。
传统的动力定位控制方式是水下机器人每个自由度上都有相应的推进器输出推力值,来控制相对应自由度上的闭环控制,对于在某些自由度上存在冗余的推力,如何选择最优的推力分配方式的研究目前在实际工程应用中还有待提升,难以实现实时在线的优化分配,来有效提升三维空间的动力定位控制性能。
因此,研究实用化的水下机器人三维空间动力定位的推力分配优化方法,解决冗余推力最优分配问题,是目前水下机器人三维动力定位中一个重点需要解决的实际问题。
发明内容
基于上述背景,本发明针对现有传统分配方法的不足,提出了一种水下机器人三维动力定位的推力分配优化方法,可以实现水下机器人冗余推力的最优分配。
一种水下机器人三维动力定位的推力分配优化方法,包括以下步骤:
建立水下机器人五自由度动力学模型,构造基于各推进器能耗之和最小以及垂直面变量优先于水平面变量得到控制评价函数,在线实时求解得到各推进器的推力分配值用于闭环控制,从而实现水下机器人垂直面与水平面解耦控制的三维动力定位的推力优化分配。
所述建立水下机器人五自由度动力学模型包括:
水下机器人三维空间动力定位时,控制器根据传感器信息实时推算所需期望推力和力矩;
τ=[τ
则有τ=Wt
其中,t
其中,l
在推力分配过程中要考虑推进器的推力范围限制,主要包括各个推进器的最大推力限制、可回转推进器最大舵角限制,不等式约束可表示为:
其中,t
所述构造基于各推进器能耗之和最小以及垂直面变量优先于水平面变量得到控制评价函数,包括:
以水下机器人的能耗最小和优先调节垂直面为目标,则评价函数可表示为:
minJ(t)=t
其中,t∈R
其中,t
本发明具有以下有益效果及意义:
1.本发明构建了水下机器人三维动力定位的评价函数,求取推力最优分配值,满足了水下机器人推力分配在线优化的工程应用需求。
2.本发明规定了能耗最小和垂直面控制优先的评价函数,实时求取得到的推力分配方案可使能耗得到优化,同时垂直面变量(深/高度、纵倾角)要优先水平面(前向距离、右向距离、航向角),能得到垂直面与水平面解耦控制的效果,避免了垂直面与水平面同时控制存在耦合互相干扰。
附图说明
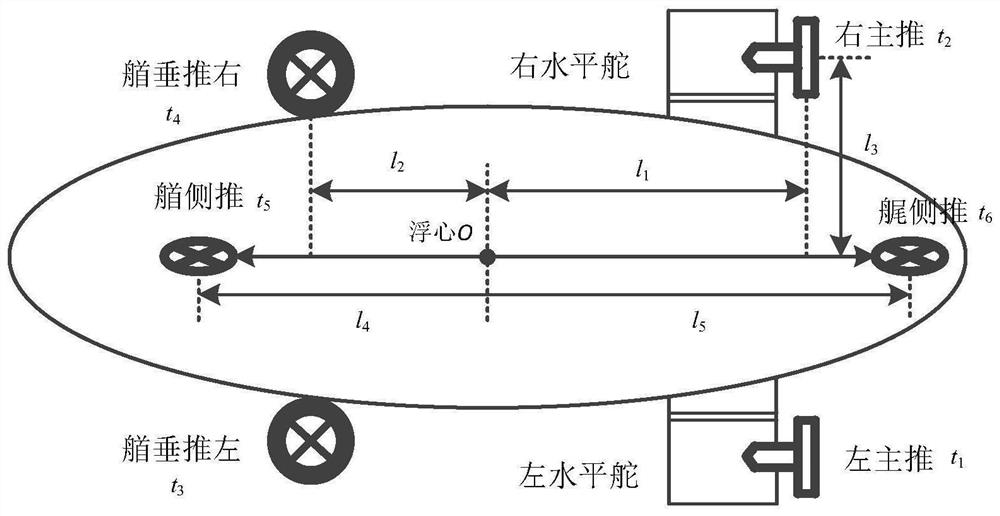
图1为本发明的水下机器人推进器分布图。
具体实施方式
下面结合附图对本发明作详细介绍。
本发明的一种水下机器人三维动力定位的推力分配优化方法,主要考虑五个自由度,分别是纵向、横向、垂向、航向角、纵倾角,没有考虑的横滚角一般通过载体衡重配平即可较容易地控制住。方法主要包括建立水下机器人五自由度动力学模型,然后构造基于各推进器能耗之和最小以及垂直面变量(深/高度、纵倾角)优先于水平面(前向距离、右向距离、航向角)得到控制的评价函数,在线实时求解得到各推进器的推力分配值,各推进器按照相应的推力目标值进行闭环控制,最终能得到垂直面与水平面解耦控制的效果,避免了垂直面和水平面同时控制存在互相耦合的干扰,从而实现水下机器人三维动力定位的推力优化分配。
具体包括以下步骤:
1、建立动力学模型
在水下机器人进行三维空间动力定位时,控制器根据传感器信息实时推算所需期望推力和力矩,
τ=[τ
τ=Wt
其中,t
其中,l
2、构建约束条件
在推力分配过程中要考虑推进器的推力范围限制,主要包括各个推进器的最大推力限制、可回转推进器最大舵角限制,不等式约束可表示为:
其中,t
3、构造水下机器人动力定位评价函数,动力定位根据水下机器人工作要求不同,其优化评价函数的构建也不同。以水下机器人的能耗最小和优先调节垂直面为目标,则评价函数可表示为:
minJ(t)=t
其中,t∈R
其中,t
权值矩阵Q中的垂向力和纵倾力矩选取要足够大,以保证垂直面优先于水平面进行控制,达到水平面与垂直面解耦控制的目的。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。
- 一种水下机器人三维动力定位的推力分配优化方法
- 一种基于遗传算法的水下机器人六自由度动力定位推力分配优化方法