一种基于宽带压缩感知的超短基线水下声源定位方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种水下声源定位方法,尤其涉及一种基于宽带压缩感知的超短基线水下声源定位方法,属于信号处理技术领域。
背景技术
水下声源定位技术是指利用水中声波以及电子技术等来确定水下声源的方向和距离的技术。通过不同形式的水听器基阵接收水下声源信号,并利用相应的技术方法对接收信号进行处理来获取信号中携带的声源信息。
随着科技的快速发展,高精度的水下定位技术研究已经成为了各国研究的热点,特别是为了应对复杂的海洋环境,对于低能耗、轻便、高精度以及低采样的水下目标定位技术研究更是倍受关注。而随着水下滑翔机产业的飞速发展,其具有的航行不耗能、上升、下沉低耗能、位置计算和信号采集为主耗能等特性,给低功耗的海洋定位、远距离资源勘探等带来了福音。其中,Laszlo Techy等将海洋滑翔机作为水下目标并携带定位设备,运用到水下目标定位技术研究中,获得了突破性成果[Techy L,Morgansen K A,Woolsey C A.Long-baseline acoustic localization of the Seaglider underwater glider[J].2011.]。
而当前,在轻便、高精度水下目标定位技术方面,超短基线定位技术是最具有代表性的,虽其定位的距离不如长基线、短基线定位技术,且在远距离的定位精度也稍次于他们,但是由于中近程的高精度、硬件设备的轻便性以及安装的快捷性等方面的优势,让其在水下声源定位领域永葆活力。近年来,Nicholas R.Rypkema、Henrik Schmidt等将超短基线定位技术应用于水下目标被动定位模式,在保证高精度的同时还大大降低了硬件设备的能耗[Rypkema N R,Schmidt H.Passive Inverted Ultra-Short Baseline(piUSBL)Localization:An Experimental Evaluation of Accuracy[C]//2019 IEEE/RSJInternational Conference on Intelligent Robots and Systems(IROS).IEEE,2019.];Erin M.Fischell等将超短基线定位技术与单程传播时间(One Way Travel-Time,OWTT)、时钟同步技术等相结合,达到对水下单、多目标进行高精度、低能耗定位目的[Rypkema NR,Fischell E M,Schmidt H.One-way travel-time inverted ultra-short baselinelocalization for low-cost autonomous underwater vehicles[C]//IEEEInternational Conference on Robotics&Automation.IEEE,2017.]。在超短基线技术产业化方面,国外较国内有更长足的发展,国内以中海达iTtack系列水声定位系统为代表的专业化水声定位产品,其采用基于水声宽带扩频技术和高精度的时间同步技术,极大提高了抗多径干扰和船体噪声的能力,是目前业内先进的高精度水声定位系统代表;国外以法国IXSEA、挪威Kongsberg、英国Sonardyne以及美国LinkiQuest等公司产品为代表的超短基线水声定位系统,在实际应用场景中,其定位精度可达0.04%斜距,可同时定位10个水下目标,至此,超短基线技术已在水声定位方面取得了不凡的成就。但是,高精度的超短基线定位往往需要足够的水声信号采样支持,而对于复杂的海洋环境来说,数据的足够采样是一大难点,这也间接导致了水声定位精度的下降。因此,研究在低采样的情况下获取高精度水声定位方法成为了一大热点。
这一难点问题可以通过Donoho等人提出的压缩感知理论解决,该理论可以保证在低采样的情况下,高精度重建出原始稀疏信号,为海洋的研究提供了巨大便利。目前,LABNaviner等对压缩感知算法、重构算法等进行了进一步的研究,使其在信号等领域更具通用性[Marques E C,Maciel N,Naviner L A B,et al.A Review of Sparse RecoveryAlgorithms[J].IEEE Access,2018,PP(99):1-1.]。但是,传统窄带信号携带信息的有限性,基于压缩感知的窄带水声定位效果并不够理想,再加上现有超短基线定位技术对欠采样研究的不足,因此需要重新设计出以滑翔机为载体的、低采样率下拥有高精度、高轻便性的水下声源定位方法。
发明内容
为了克服现有技术方案的不足,本发明提供一种基于宽带压缩感知的超短基线水下声源定位方法,不仅在海洋欠采样环境下保证了中近程定位精度,还保证了硬件设备的轻便性和安装的快捷性。
为实现上述发明目的,本发明采用如下技术方案:
一种基于宽带压缩感知的超短基线水下声源定位方法,包括以下步骤:
步骤一:通过水下滑翔机携带的超短基线正交十字阵列,按任意阵列处理形式,并叠加高斯随机噪声复矩阵N,得到阵列模拟接收数据Y。
步骤二:对超短基线阵列接收数据Y,利用快速傅里叶变换(FFT)将原阵列接收信号从时域变换到频域,然后按照相干信号子空间方法(CSM)进行数据频域聚焦,通过T(f
步骤三:利用二维宽带l
步骤四:利用信源位置所属的方位角、俯仰角网格空间,构建出压缩感知测量矩阵Θ。
步骤五:在已经获得的信号子空间信号Y
所述的一种基于宽带压缩感知的超短基线水下声源定位方法,在步骤一中,采用的接收阵列阵元个数为4个,他们两两一组,成正交的形式分布于X轴和Y轴上,并且采用任意阵模式来获取接收信号;
其中,任意阵的阵列流形A为如下形式:
其中,x
采用的高斯随机噪声,其概率密度函数如下所示:
最终得到模拟阵列接收信号Y=AS+N,S为原始发射信号构成的信号矩阵。
所述的一种基于宽带压缩感知的超短基线水下声源定位方法,在步骤二中,需利用快速傅里叶变换(FFT)将阵列接收信号从时域变换到频域,并利用相干信号子空间方法(CSM)对所有频段进行聚焦;
其中,CSM的聚焦过程集中体现在聚焦矩阵的构建上,本发明采用旋转子空间聚焦矩阵(Rotational Signal-Subspace,RSS)算法来构建聚焦矩阵,该方法使得聚焦后的阵列流形与参考频率点的阵列流形间的误差最小,即满足
s.t.T(f
其中,i=1,2,...,N
T(f
其中,V(f
T(f
最后,通过将所有频率进行频域聚焦并对每次获得的聚焦信号求平均,即可得到最终的聚焦信号
所述的一种基于宽带压缩感知的超短基线水下声源定位方法,步骤三中,在常规l
其中,二维宽带l
(a)对聚焦信号
(b)根据估计的信源个数,构造单位矩阵I(P),其中P为待估信源个数;
(c)构造D
D
其中,n
(d)利用右奇异值矩阵U、D
所述的一种基于宽带压缩感知的超短基线水下声源定位方法,在步骤四中,利用信源的方位角和俯仰角网格空间,构造压缩感知稀疏测量矩阵Θ,并需满足约束等距性条件(RIP);
(a)约束等距性条件(Restricted Isometry Property,RIP),其需要满足如下不等式:
其中,Ssv表示稀疏信号,δ
(b)针对(a)中条件,提出了对应于本发明中四个阵元的测量矩阵的构造形式:
[x
所述的一种基于宽带压缩感知的超短基线水下声源定位方法,在步骤五中,利用了步骤三获得的信号子空间矩阵Y
其中,在二阶锥规划重建稀疏信号方面,其结合了投影梯度法、内点法和迭代阈值法等方法,可以高精度解决对凸函数稀疏信号的重建问题,通过对下式采用二阶锥规划获得稀疏估计信号Ssv:
s.t.‖Y
其中,ε表示噪声阈值,通过调节合适的正则化参数,可以高精度重建出原始稀疏信号,并通过对估计的稀疏信号进行二维谱峰搜索,得到对应信源的方位角和俯仰角估计值,即有:
之后,便可通过三角变换将角度变换到普通三维距离坐标系中,获得直观的位置估计结果。
本发明的有益效果是:
与传统的超短基线定位技术相比,本方法可以针对复杂的海洋环境而导致定位信号采样不足情况,对其进行高精度原始信号稀疏重建,并获得高精度的水下声源方位角和俯仰角,总体的定位精度约为1%斜距,在较高信噪比环境下(信噪比>0),定位精度可以提升到0.1283%斜距,该精度较现有的广义互相关算法等均有约0.1%斜距的精度提升,且对低信噪比环境具有更好的鲁棒性。与现有的基于窄带或者相干信号子空间(ISM)宽带处理方法的压缩感知技术相比,本方法采用相干信号子空间方法(CSM)处理宽带信号,可以更加有效的利用宽带信号多频信息,精度较现有方法约有1%斜距的提升。更有效的是,本方法采用了二维宽带l
附图说明
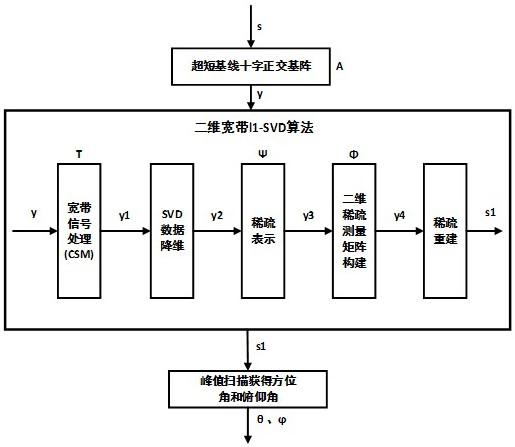
图1为本发明方法的总体流程示意图;
图2为超短基线基阵结构图;
图3为本发明方法在[600,800,1000]位置对应方位角和俯仰角的定位效果示意图;
图4为本发明方法X轴方向信噪比误差分析示意图;
图5为本发明方法Y轴方向信噪比误差分析示意图;
图6为本发明方法Z轴方向信噪比误差分析示意图;
图7为本发明方法在空间多位置的定位效果示意图。
具体实施方式
下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
本发明针对现有的基于超短基线定位方法在复杂海洋环境中因欠采样而导致定位精度下降问题,提出了压缩感知补偿方法,利用压缩感知的低采样、高精度等特点,将原本超短基线基阵采样不够充分的定位信号,利用压缩感知算法对原信号进行稀疏重建,并高精度提取水下声源的方位角和俯仰角。本发明方法可以有效将当代海洋探测中亟需的两种技术要求—轻便、低能耗设备要求、数据欠采样处理方法要求相结合,对海洋资源探测、军事目标探测及定位等领域具有重要的意义。
本发明所述的一种基于宽带压缩感知的超短基线水下声源定位方法,切合考虑了海洋环境的复杂性,将压缩感知方法和宽带超短基线方法融合,并采用低能耗的滑翔机作为目标载体;方法的总体流程如图1所示,设计的具体步骤如下:
步骤一:通过水下滑翔机携带的超短基线正交十字阵列,按任意阵列处理形式,并叠加列为高斯随机噪声的复矩阵N,得到阵列模拟接收数据Y。
在本发明中,超短基线基阵采用的接收阵列阵元个数为4个,他们两两一组,成十字正交的形式分布于X轴和Y轴上,结构如图2所示,并且采用任意阵模式来获取接收信号;基阵阵元间距d=λ/2。
在实验中,采用的宽带chrip信号,其低频为12000Hz,高频为15000Hz,中心频率为13500Hz;声速c=1500m/s,宽带信号的带宽为3000Hz,采样频率为100e3Hz,根据频率与声速的关系,波长λ=c/f
其中,采用的任意阵阵列流形A为如下形式:
其中,x
采用的高斯随机噪声,其概率密度函数如下所示:
其中,μ为添加的高斯随机噪声均值,σ为添加的高斯随机噪声标准差,可以通过信噪比计算出合适的均值和标准差,在实验中,可以利用Matlab提供的awgn函数来实现高斯随机噪声的添加。
最终得到模拟阵列接收信号Y=AS+N,其规模为4*200,S为原始发射信号构成的信号矩阵。
步骤二:对超短基线阵列接收数据Y,先利用快速傅里叶变换(FFT)将原阵列接收信号从时域变换到频域,然后按照相干信号子空间方法(CSM)进行数据频域聚焦,通过T(f
在实验中,宽带信号的分频个数设置为100,聚焦频率选择宽带信号中心频率。
其中,相干信号子空间方法(CSM)的聚焦过程集中体现在聚焦矩阵的构建上,本发明采用旋转子空间聚焦矩阵(Rotational Signal-Subspace,RSS)算法来构建聚焦矩阵,该方法使得聚焦后的阵列流形与参考频率点的阵列流形间的误差最小,即满足
s.t.T(f
其中,i=1,2,...,N
T(f
其中,V(f
T(f
最后,通过将所有频率进行频域聚焦并对每次获得的聚焦信号求平均,即可得到最终的聚焦信号
步骤三:利用二维宽带l
在常规l
其中,二维宽带l
(a)对聚焦信号
(b)根据估计的信源个数,构造单位矩阵I(P),其中P为待估信源个数;
(c)构造D
D
其中,n
(d)利用右奇异值矩阵U、D
根据算法基本原理和实验参数可知,未经过奇异值分解前,原阵列聚焦信号
步骤四:利用信源位置所属的方位角、俯仰角网格空间,构建出压缩感知测量矩阵Θ。
通过利用信源的方位角和俯仰角待估空间,划分稀疏网格,构造压缩感知稀疏测量矩阵Θ,并需满足约束等距性条件(RIP)。
由水下定位的基本原理和基阵的几何性质可知,方位角
(a)构建的测量矩阵如果需保证高精度重建原始稀疏信号,需要满足约束等距性条件(Restricted Isometry Property,RIP),其需要满足如下不等式:
其中,Ssv表示稀疏信号,δ
(b)针对(a)中条件,提出了对应于本发明中四个阵元的测量矩阵的构造形式:
[x
步骤五:在已经获得的信号子空间矩阵Y
这一步需要利用步骤三获得的信号子空间矩阵Y
其中,在二阶锥规划重建稀疏信号方面,其结合了投影梯度法、内点法和迭代阈值法等方法,可以高精度解决对凸函数稀疏信号的重建问题,通过对下式采用二阶锥规划获得稀疏估计信号Ssv:
s.t.‖Y
其中,ε表示噪声阈值,通过调节合适的正则化参数,在本实验中,该值取为1.9995,可以高精度重建出原始稀疏信号,并通过对估计的稀疏信号进行峰值搜索,得到对应信源的方位角和俯仰角估计值,即有:
之后,便可通过三角变换将角度变换到普通三维距离坐标系中,获得直观的位置估计结果,其中i、j为整数且1≤i≤91,1≤j≤361。
在实验中,由于初始的位置坐标是按照三维距离坐标系测算,而在计算过程中,采用方位角和俯仰角的三维角度坐标系,所以需要将距离坐标按照如下的转换公式将其转换到三维角度空间中对应的角度坐标:
θ=arccos(Z/r)
其中,r为斜距,本模拟实验采用欧式距离
在获得方位角和俯仰角估计值后,无法直观看出与真实位置之间的偏差,因此,需要利用下式将角度坐标转换成对应的距离位置坐标:
X=rcos(θ)
为了验证本发明提出的方法在水下声源定位方面的有效性,通过将算法运行在Intel(R)Core(TM)i5-9600K CPU@3.70GHz计算机和Matlab2019b仿真平台上。图3是在测试位置为X=600m,Y=800m,Z=1000m处、信噪比SNR=10dB、网格划分取0.1°时取得的方位角、俯仰角估计效果,其中对应测试位置的方位角
图4—图6是对算法的信噪比量化误差分析,实验中首先将本发明方法与基于窄带的压缩感知方法进行了效果对比,可以发现宽带的效果要全方位优于窄带效果。更重要的是,实验将本发明提出的方法与现有经典的广义互相关算法进行信噪比效果对比,可以发现在较高信噪比(SNR>0)环境下,本发明方法定位精度要优于广义互相关算法,而在较低信噪比环境下,其对信噪比的鲁棒性更好,达到了方法的预期定位精度要求。
图7是测试本方法在不同空间位置上的定位精度,看其在全局预期的定位空间内(-5000m≤X≤5000m,-5000m≤Y≤5000m,0m 表1
从定位结果来看,估计值均与理论值相近,从X、Y、Z三个方向分别来看,其精度均在1%斜距以内,对水下声源定位具有较高精度。 从以上的模拟实验和误差分析实验可以看出,本发明方法不仅保证了水下声源定位的较高精度,还解决了因海洋复杂环境而导致数据欠采样问题,达到了在降低数据采样率的同时,保证了较高定位精度的目的。 本发明方法提出了一种基于宽带压缩感知的超短基线水下定位技术,其不仅保证了超短基线低能耗、轻便性、中近程高精度等特点,还融合了宽带信号的多信息化特点及压缩感知技术的低采样特点,在实际海洋环境中具有广泛的应用价值。需指出的是,具体实现本方案的方法途径有很多,以上所述仅为本发明的优选实施方案,对于本技术领域的普通技术人员来说,在不脱离本发明的前提下,还可做出若干改进和润饰,这些改进和润饰也应当视为本发明的保护范围内。本实施例中未明确的部分均可用现有技术加以实现。
- 一种基于宽带压缩感知的超短基线水下声源定位方法
- 一种基于宽带信号时延检测的超短基线水下目标定位方法