变形梁结构优化的电容式力矩传感器
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及传感器技术领域,具体涉及一种可用于工业机器人、协作机器人、医疗康复机器人、阻力外骨骼等扭矩测量的电容式力矩传感器。
背景技术
电容式力矩传感器是基于电容器原理设计出的一种传感器,其包括静电极和动电极,在传感器受力发生变形时,动电极与静电极的距离产生变化,它们所构成的电容大小也会相应变化,通过测量电容差值,从而建立起电容差与力矩之间的关系,实现力矩的测量。由于具有可实现非接触测量、小尺寸、高精度、动态响应好等优点,被广泛应用在康复训练步态机器人等控制领域,对机器人关节受力实时监测,实现人机融合协作。
然而在目前机器人的关节应用中,现有的力矩传感器容易受到干扰跳动,人体或者是其他物体靠近感应电极附近时,采集数据会发生跳动,目前传感器主要依靠电容边缘效应来检测传感器信号,但是感应信号较小,这样采集出的传感器分辨率不足,而且因为存在伺服电机等外部的干扰源,传感器通常采用金属的外壳,传感器的感应电容非常小,即使采用接地等措施,也难以消除干扰,而且现有的传感器受到力矩作用时应力非常集中,容易导致传感器内的变形梁开裂。
发明内容
本发明的目的在于提供一种具有抗干扰功能且可以消除集中应力的力矩传感器。
为实现上述目的,本发明采用以下技术方案:
变形梁结构优化的电容式力矩传感器,包括传感器主体、电路板以及若干组电容器,所述传感器主体包括连接负载端和电路板的传感器外圈、连接动力端的传感器内圈及连接在所述传感器外圈与内圈之间的变形梁,每组所述电容器包括一动电极和一静电极,所述动电极沿传感器的轴向垂直固定在所述传感器内圈上,所述静电极垂直设在电路板上并位于动电极一侧,所述静电极与动电极的表面相互平行并留有间隙,所述变形梁的形状为中间窄两头宽的腰形,两侧面的边缘线条为椭圆弧形状。
所述传感器主体内设有传动轴以及依次安装在传动轴的轴身上的外压紧法兰、轴承和内压紧法兰,所述传感器主体的内壁上形成第一、第二台阶,所述传动轴顶端的头部形成外矩形花键,并且外矩形花键与所述传感器内圈的内花键相配合实现花键联接,所述外压紧法兰通过螺钉固定在内壁的第一台阶上并压紧在轴承的外圈下端,轴承的外圈上端压在内壁的第二台阶上,所述内压紧法兰通过螺钉固定在传动轴的第一轴肩上并压紧轴承的内圈上端,轴承的内圈下端压在所述传动轴的第二轴肩上。
还包括过渡法兰,所述传动轴的底端通过螺丝连接外部的驱动电机,所述传感器外圈通过螺栓与所述过渡法兰相连,并通过所述过渡法兰连接外部的负载。
所述电路板上在与所述动电极对应的位置上分别开有用于容许所述动电动极伸出的条形槽,所述静电极设在每个条形槽的边缘上并且与所述动电极相邻。
所述电路板具有四层结构,其中第二层分布电极信号线及电路,顶层以及第三、第四层均为屏蔽层。
轴承采用内置十字型交叉滚子轴承,且两面具有密封圈。
所述静电极与动电极的间距小于2mm。
采用上述技术方案后,本发明与背景技术相比,具有如下优点:
1、目前现有传感器的静电极与动电极在物理结构上大多是相互垂直的位置关系,主要依靠电容边缘效应来检测传感器信号,但是感应信号较小,这样采集出的信号分辨率不足;同时,因为静电极和金属外壳是相平行的位置,它们之间相当于平行板电容器,这样也引入了外壳干扰。因此本发明将静电极与动电极相垂直的方式改成平行的方式,使得静电极与动电极的相对面积加大,感应电容变大,采集信号的分辨率也将大大提高,同时由于静电极与金属外壳相垂直,也有效地排除了外壳的辐射感应干扰。
2、本发明的变形梁的两侧面设计成椭圆弧的形状,消除了通常集中在变形梁与内圈连接处的应力,调整后的应力分布很均匀。
3、传动轴、外压紧法兰、十字型交叉滚子轴承、内压紧法兰等构成的解耦结构具有自动克服各种工况下倾覆力矩、轴向压力和径向压力等非待测力矩对测量准确性的影响,避免与力矩传感器所受到的待测力矩产生力耦合效应而造成测量误差问题,实现对力矩的准确测量。
附图说明
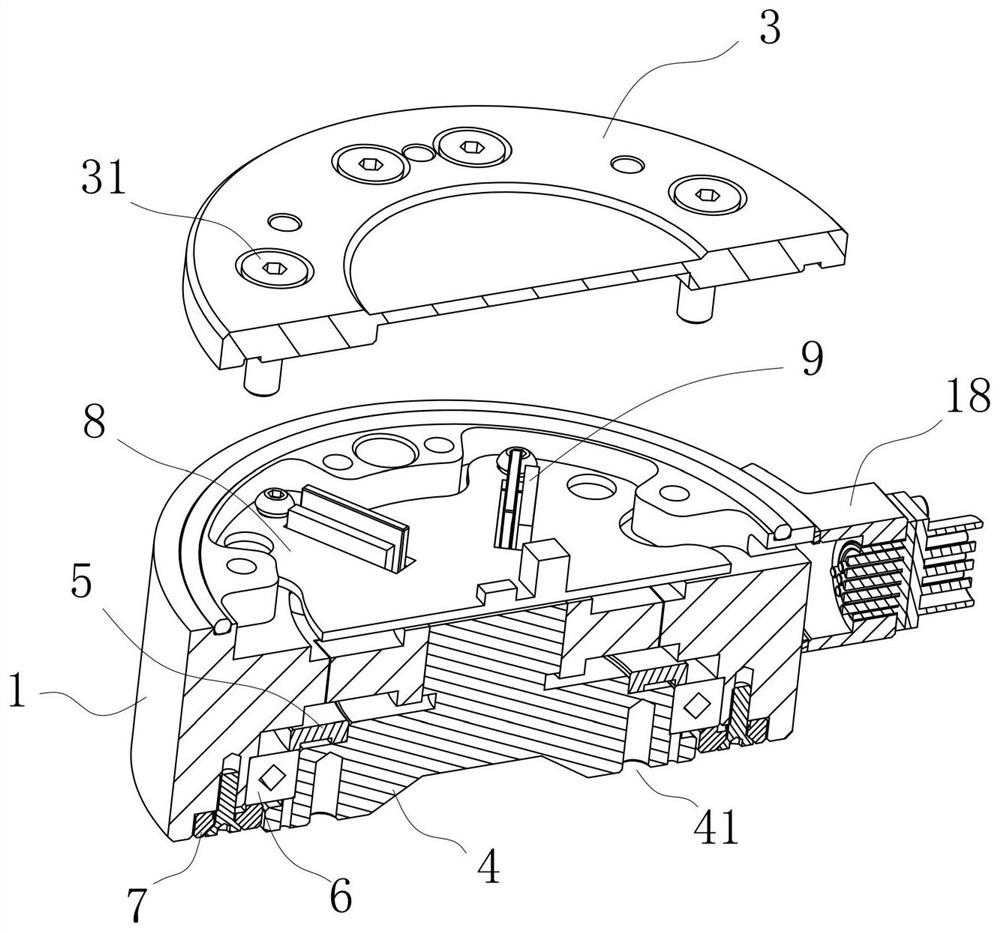
图1为本发明的立体剖面示意图;
图2为传感器上4组电容器分布的示意图;
图3为传感器主体的结构示意图;
图4为现有的变形梁形状;
图5为本发明的爆炸示意图;
图6为本发明的截面图;
图7为传感器主体上的动电极连接在传感器内圈上的示意图;
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例
请参阅图1至图5所示,本发明公开了变形梁结构优化的电容式力矩传感器,包括传感器主体1、过渡法兰3、设在传感器主体1内的传动轴4、内压紧法兰5、轴承6、外压紧法兰7、电路板8和四组电容器9;每组电容器9 分别包括一动电极91和一静电极92,动电极91与静电极92的表面之间留有间隙并相互平行设置。
见图3,传感器主体1包括传感器外圈11、传感器内圈12、四道变形梁 13、两道过载保护梁14和两道连接梁96,变形梁13连接在传感器外圈11与传感器内圈12之间并呈轮辐式分布,过载保护梁14和连接梁96为固定在传感器内圈12边缘上并往传感器外圈11方向伸出的悬臂梁,过载保护梁14的末端与传感器外圈11之间留有一定间隙,起过载保护作用,连接梁96上设有用于连接动电极91的连接孔,过载保护梁14和连接梁96依次交替设在变形梁13之间,传感器外圈11的内壁上形成多处台阶(第一台阶16、第二台阶17),传感器主体1内部形成用于容纳轴承和法兰等多个部件的空腔,传感器主体1上还设有接头18,用于连通电源和通讯。
传动轴4通过底部的连接孔41上的螺丝来连接外部的驱动电机,传动轴 4顶端的头部形成有矩形花键42,并且头部的外矩形花键42与传感器内圈12 的内花键15相配合实现花键联接,传动轴4的轴身上形成多处轴肩(第一轴肩43、第二轴肩44等),轴身上依次安装有内压紧法兰5、轴承6和外压紧法兰7,轴承6具有轴承的外圈和内圈,外压紧法兰7通过螺钉71固定在内壁的第一台阶16上并压紧在轴承6外圈的下端,轴承外圈的上端压在内壁的第二台阶17上,内压紧法兰5通过螺钉51固定在传动轴4的第一轴肩43上并同时压紧在轴承内圈的上端,把轴承内圈的下端压在传动轴4的第二轴肩 44上。轴承6采用内置十字型交叉滚子轴承,轴承的两面自带密封圈。
传感器内圈12上连接有四个动电极91,板状的动电极91通过两个安装块95连接在传感器内圈12上,每个安装块95的中间通过螺丝连接在传感器内圈的连接梁96上,安装块95的两侧面分别通过螺丝连接两个动电极91,使得四个动电极91以内圈中心对称分布且沿传感器的轴向垂直设置,电路板8 通过螺钉81固定在传感器外圈11上,电路板8上在与每个动电极91对应的位置上分别开有四个容置动电极91的条形槽,在每个条形槽的边缘上分别连接一个静电极92,静电极92与电路板8的表面相垂直,使得安装上电路板8 后,动电极91正好伸出在每个条形槽的位置上且正好与每个静电极92相邻,静电极92与动电极91的表面相平行并且两者留有一定间隙,四个动电极91 和静电极92分别构成了四组电容器9。
传感器外圈11通过螺栓31与过渡法兰3相连,过渡法兰3同时连接外部的负载,过渡法兰3与传感器外圈11之间设有密封圈,外部的驱动电机等提供动力的一端连接传动轴4,电机转动产生的力矩通过传动轴4传递到传感器内圈12,人体反馈在负载上的力作用在过渡法兰3上并传递到传感器外圈 11,传感器内圈12和传感器外圈11之间形成力矩差,在力矩差的作用下,变形梁13产生一定的变形,使传感器内圈12和传感器外圈11出现转角差,从而引起固定于传感器内圈12上的动电极91与固定于传感器外圈11的静电极92的间距发生变化,从而引起电容量的变化,通过检测到的电容变化转换得出力矩值,实现对力矩的测量,本实施例中动电极91与静电极92之间的距离小于2mm,动电极91与静电极92的间距越近效果越好,只要留有空隙即可。
见图3,本发明的变形梁13的形状设计成中间窄两头宽的腰形,两侧的边缘线条形状为椭圆弧,采用腰形的形状结构是为了消除传统的变形梁结构的应力,因为目前大多数力矩传感器的变形梁都采用类似矩形的形状,边缘为直线(见图4),应力非常集中并且通常集中在变形梁与内圈的连接处,见图 4中的A处,非常容易导致变形梁与内圈连接处开裂,本发明将现有变形梁的形状做了调整,调整后应力分布很均匀,最大应力未超出屈服强度应力,得到很好改善,见下方的试验数据表格,表1为图4所示的具有已有变形梁结构的传感器的测试数据,表2为本发明传感器的测试数据;
表1
表2
可以看出,在试验中,当加载在传感器上的力矩消失后(卸载),现有传感器的实测力矩与标准力矩相比,误差从-9.6%到792%不等,而表2的本发明传感器的实测力矩与标准力矩相比,误差在-0.2%至0.56%之间,比表1 的误差大大降低,说明当施加在变形梁上的力矩消失后,本发明的变形梁能较快从变形中恢复到原来程度。
电路板8具有四层结构,其中第二层分布电极信号线及电路等,顶层以及第三、第四层均为屏蔽层,原先的两层结构电路板是把信号线放在顶层,这样容易受到金属外壳的外界干扰影响,新的四层电路板8可以使静电极信号传输过程中不受到干扰,保持信号稳定。电路板8上设有长圆形的螺孔,螺钉81通过长圆形螺孔将电路板8连接在传感器外圈11上,并且可以通过长圆形螺孔来调节电路板8在传感器外圈11上的相对位置,从而改变动电极 91与静电极92之间的初始间距,实现对传感器灵敏度和量程的调节。
传动轴4、外压紧法兰7、轴承6、内压紧法兰5构成解耦结构,当轴向压力作用在过渡法兰3上,并通过传感器外圈11传递到十字型交叉滚子轴承 6的外圈上,传动轴4的第二轴肩44处给轴承内圈提供支持力以平衡轴向压力,实现轴向解耦。当径向压力通过传感器外圈11传递到轴承外圈上,传动轴4对轴承内圈起到支撑作用以平衡外部的径向压力,实现对径向压力的解耦。当倾覆力矩作用于传感器上时,倾覆力矩等效为两种力的共同作用,即传感器的一侧受轴向拉力的作用,另一侧受轴向压力的作用,其平衡原理与轴向解耦的功能相同。因此解耦结构具有自动克服各种工况下倾覆力矩、轴向压力和径向压力等非待测力矩对测量准确性的影响,避免与力矩传感器所受到的待测力矩产生力耦合效应而造成测量误差问题,实现对力矩的准确测量。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
- 变形梁结构优化的电容式力矩传感器
- 一种具有复合梁结构的电容式六维力传感器