一种具备工程数据检测功能的便携式智能测量小车
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于工业智能领域,涉及一种具备工程数据检测功能的便携式智能测量小车。
背景技术
铁路基建一直是国家的重点建设工程,铁路的建设推动了各个产业发展。而在加快推进5G建设的同时,将会进一步推进铁路信息化、智能化和数字化进程。因此,铁路智能化成为热点课题,其中在铁路建设中加强数字化信息化建设不但可以实现后期的综合管控和优化调度,而且可以提高作业效率以及设备安全性稳定性;并且用智能机器代替人工作业可增强设备的自动化程度,让铁路信息化数字化建设的人工投入成本降低,数据精确度提高,进一步提升作业效率,这对高速铁路的快速发展具有重要意义。
发明内容
本发明为了克服现有技术的不足,提供一种具备工程数据检测功能的便携式智能测量小车。
为了实现上述目的,本发明采用以下技术方案:一种具备工程数据检测功能的便携式智能测量小车,其特征在于:包括控制模块、行进模块、喷码模块、里程模块和测量模块,控制模块包括主控制器、装置本体触控屏、电机控制器以及远程遥控手柄,控制模块控制命令下达和信息处理,行进模块包括承载框架和行进机构,行进模块控制小车运行,喷码模块对枕木进行喷码,里程模块记录里程数据,测量模块自动测量轨道的电参数。
进一步的;所述控制模块包括主控制器、装置本体触控屏、电机控制器以及远程遥控手柄,装置本体触控屏与主控制器采用有线连接进行信号传输,用于操作人员在初始化装置进行相应工作时对相关参数和指标进行调整和选择,并在装置发生故障时对装置主控数据进行调取和检查;远程遥控手柄与主控制器采用无线连接进行信号传输,用于操作人员远程接管装置动作应对特殊情况和特殊需求;电机控制器与主控制器采用有线连接进行信号传输,用于在主控制器对行进模块下达转弯指令时控制两侧车轮电机的不同转速,所述行进模块包括承载框架和行进机构,行进机构包括主动驱动组件和从动驱动组件,主动驱动组件通过行进电机驱动,行进电机与电机控制器采用电路连接,电机控制器对行进电机转速进行控制,行进电机上设置有光电编码器,光电编码器与行进电机采用电路连接,将行进电机转动的机械几何位移量转换成数字量。
进一步的;所述喷码模块包括字符喷码装置、墨盒、防尘外壳、舵机、基机构、吹尘机构和运动机构,墨盒插入字符喷码装置,便于更换,字符喷码装置与主控制器建立数据连接;字符喷码装置的底部固设有喷口,由喷口进行喷码,定基机构位于字符喷码装置的底部,防尘外壳将字符喷码装置喷口底部和定基机构包裹,防尘外壳连接有固定板,通过固定板与运动机构连接,防尘外壳与字符喷码装置连接;防尘外壳侧面固设有底部门帘,舵机位于底部门帘的内侧,通过传动机构与底部门帘联动,并与主控制器建立数据连接,用于启闭底部门帘并完成启闭的确认操作;防尘外壳底部设置有限位板,限位板上固设有限位槽,字符喷码装置的喷口穿过限位槽,限位板两侧分别延展出两组连接部,每组连接部上设置有穿透孔,定基机构穿过穿透孔并与连接部转动连接。
进一步的;所述吹尘机构包括压缩气泵、输气管和气吹喷嘴,压缩气泵通过输气管与气吹喷嘴连接,将压缩气体从气吹喷嘴中喷出,清理字符喷码装置喷口处的粉尘,压缩气泵与主控制器建立数据连接,运动机构包括平移运动机构和升降运动机构,平移运动机构包括平移丝杆行架和平移驱动电机,平移驱动电机驱动平移滑块平移运动;升降运动机构包括升降丝杆行架和升降驱动电机,升降驱动电机驱动升降滑轨升降运动,平移驱动电机和升降驱动电机分别与主控制器建立数据连接。
进一步的;还包括调节机构,调节机构调节喷口的平面自由度,使喷口平面和枕木表面保持平行,调节机构包括两组调节弹簧,两组调节弹簧的一端对称固设在限位板的两侧,两组调节弹簧的另一端与防尘外壳连接,字符喷码装置与限位板连接,并随限位板的移动同步移动,通过两组调节弹簧的受力不同,影响两组调节弹簧收缩程度,控制限位板倾斜度,带动字符喷码装置贴合倾斜枕木的表面。
进一步的;所述里程模块包括里程计、RTK卫星定位装置一和RTK卫星定位装置二,里程计、RTK卫星定位装置一和RTK卫星定位装置二分别固设在承载框架上,里程计和RTK卫星定位装置一建立数据连接后与主控制器共同建立数据连接,里程计与光电编码器建立数据连接。
进一步的;所述里程计或/和RTK定位系统测量里程数据,里程计记录行进距离数据和行进路线数据,并对数据进行计算和存储,RTK定位系统包括RTK卫星定位装置一、RTK卫星定位装置二以及基准站,基准站通过数据链将其观测值和测站坐标信息传送给小车,RTK定位系统对里程计记录的数据进行校准。
进一步的;所述测量模块包括车载移频测试装置、第一连接导线、第二连接导线、第一自动顶压机构、第一自动顶压机构、第一检测探头和第二检测探头,第一自动顶压机构和第一自动顶压机构采用相同结构,第一检测探头和第二检测探头采用相同结构,第一自动顶压机构和第一检测探头固定连接,第一自动顶压机构和第二检测探头固定连接,第一自动顶压机构和第一自动顶压机构对称固设在承载框架的左右两侧。
进一步的;所述第一自动顶压机构包括L型连接框架、安装平台、顶压电机和伸缩连杆,L型连接框架固定设置在承载框架上,安装平台固定在L型连接框架的底端,顶压电机和伸缩连杆安装于安装平台,顶压电机的驱动杆与伸缩连杆连接控制伸缩连杆的上下运动;第二检测探头包括连接平台、连接螺栓和检测探针,连接平台固定于伸缩连杆的底端,连接平台与伸缩连杆采用绝缘方式连接或连接平台本身为绝缘材料,检测探针与连接螺栓采用端面非绝缘连接方式实现导电一体式连接,检测探针通过连接螺栓与连接平台固定连接,顶压电机控制检测探针上移至指定测量位置控制对参数的测量。
进一步的;所述检测探针设置有多组,车载移频测试装置通过第一连接导线与第一检测探头电路连接,通过第二连接导线与第二检测探头电路连接,第一连接导线的一端连接车载移频测试装置的电压接入端,第一连接导线的另一端连接第一检测探头的连接螺栓,通过连接螺栓压紧第一连接导线的触点连接处,第二连接导线的一端连接车载移频测试装置的电压接入端,第二连接导线的另一端连接第二检测探头的连接螺栓,通过连接螺栓压紧第二连接导线的触点连接处,测量开路电压,车载移频测试装置还设置有钳形表,钳形表与车载移频测试装置的电流接入端相连测量短路电流,车载移频测试装置与主控制器建立数据连接,第一自动顶压机构、第一自动顶压机构内的顶压电机与主控制器建立数据连接。
综上所述,本发明的有益之处在于:
1、本发明采用控制模块对相关模块进行控制,保证同步控制以及控制的精准性。
2、本发明设计第一弹簧液压机构进行缓冲,保证电子器件的稳定运行,第一连接部、第二连接部、第一车轮连接部和第一弹簧液压机构通过螺栓两两首尾连接形成类三角机构,有效提高主动驱动组件的运行稳定性;并根据使用场合采用有轨铁轮或无轨胶轮,保证小车在不同场合均可使用。
3、本发明采用喷码模块实现枕木进行喷码,通过动机构将平移运动和升降运动结合,从而将字符喷码装置移动至指定的喷码位置,本发明采用喷码模块中设计有调节机构,调节机构调节喷口的平面自由度,使喷口平面和枕木表面保持平行,保证喷码的效果,本发明采用调节机构采用弹簧或伸缩杆进行调节,结构简单,操作简便,本发明的防尘外壳侧面设计有底部门帘,舵机通过传动机构与底部门帘联动,用于启闭底部门帘并完成启闭的确认操作,底部门帘起到防护作用。
4、本发明采用里程模块对里程进行测量,从而将小车运行过程中记录装置的行进距离和行进路线同时间接测量轨道铺设距离和铺设路线,本发明采用RTK定位系统对里程计测量的里程数据进行校准,保证里程数据的精准度。
5、本发明采用测量模块实现对轨道上的电路电压、电流、载频和补偿电容的自动检测。
6、本发明车载移频测试装置测量轨道参数,并判断轨道电气信号是否异常,提高了安全性。
7、本发明根据测试项目自动切换线路的通断,实现开路测量电压和短路测量电流的功能。
附图说明
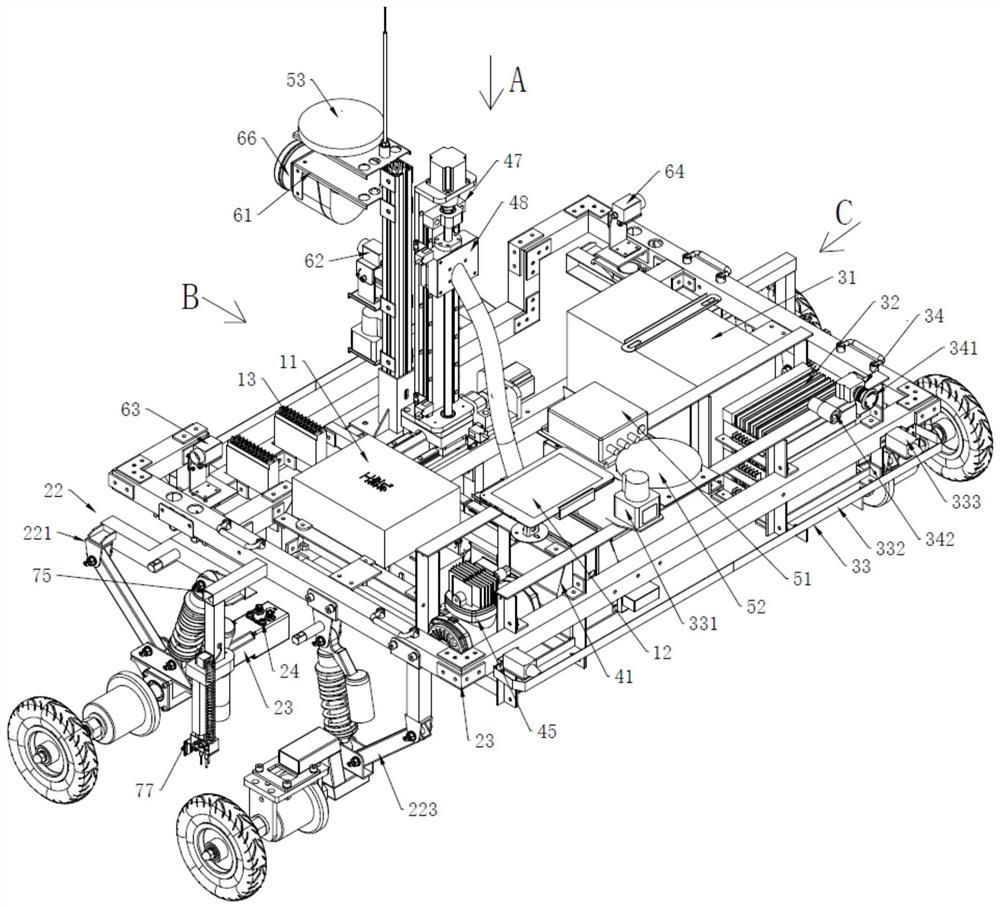
图1为本发明的装置示意图。
图2为图1中A方向的示意图。
图3为图1中B方向的示意图。
图4为图1中C方向的示意图。
图5为本发明的主动驱动组件示意图。
图6为本发明的从动驱动组件示意图。
图7为本发明的下连接部示意图。
图8为本发明的喷码模块示意图。
图9为本发明的喷码模块仰视图。
图10为本发明的实施例二调节机构的示意图。
图11为本发明的吹尘机构示意图。
图12为本发明的运动机构示意图。
图13为本发明的测量模块示意图。
图14为本发明的实施例二调节机构示意图。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
本发明实施例中所有方向性指示(诸如上、下、左、右、前、后、横向、纵向……)仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
实施例一:
如图1-13所示,一种具备工程数据检测功能的便携式智能测量小车,包括控制模块、行进模块、喷码模块、里程模块和测量模块,控制模块包括主控制器11、装置本体触控屏12、电机控制器13以及远程遥控手柄,控制模块控制命令下达和信息处理,行进模块包括承载框架21和行进机构22,行进模块控制小车运行,喷码模块对枕木进行喷码,里程模块记录里程数据,测量模块自动测量轨道的电参数。
控制模块包括主控制器11、装置本体触控屏12、电机控制器13以及远程遥控手柄(图未显示),装置本体触控屏12与主控制器11采用有线连接进行信号传输,用于操作人员在初始化装置进行相应工作时对相关参数和指标进行调整和选择,并在装置发生故障时对装置主控数据进行调取和检查;远程遥控手柄与主控制器11采用无线连接进行信号传输,具体可采用RF射频通信进行信号传输,用于操作人员远程接管装置动作应对特殊情况和特殊需求;电机控制器13与主控制器11采用有线连接进行信号传输,用于在主控制器11对行进模块下达转弯指令时控制两侧车轮电机的不同转速实现差速转弯。
如图5-7所示,行进模块包括承载框架21和行进机构22,承载框架21作为承载部件,用于承载其他模块,行进机构22设置有两组,且对称连接在承载框架21的两侧,行进机构22包括主动驱动组件221和从动驱动组件222,主动驱动组件221通过行进电机23驱动,行进电机23与电机控制器13采用电路连接,通过电机控制器13实现对行进电机23转速的控制进而实现对车轮转速的控制,行进电机23上设置有光电编码器24,光电编码器24与行进电机23采用电路连接,将行进电机23转动的机械几何位移量转换成数字量;主动驱动组件221和从动驱动组件222可采用相同结构也可采用不同结构,只要实现行进功能即可,本实施例中,主动驱动组件221和从动驱动组件222采用不同的结构。
如图5所示,主动驱动组件221包括主动支架结构和主动车轮结构,主动支架结构包括第一支架固定板2211、第一连接部2212、第二连接部2213、第一车轮连接部2214和第二车轮连接部2215,第一支架固定板2211固定于承载框架21的下端面,第一连接部2212上固定设置有第一悬挂部2217,用于备用轮胎的悬挂放置;为在行进过程进行缓冲,保证电子器件的稳定运行,主动驱动组件221还包括用于缓冲的第一弹簧液压机构2216,第一连接部2212、第二连接部2213、第一车轮连接部2214和第一弹簧液压机构2216通过螺栓两两首尾连接形成类三角机构,有效提高主动驱动组件221的运行稳定性。
主动车轮结构包括有轨铁轮2221和无轨胶轮2222,有轨铁轮2221和无轨胶轮2222同轴连接,具体来说,无轨胶轮2222内部为刚性框架结构,刚性框架结构中心固设有胶轮转杆22221,有轨铁轮2221上固设有环形凸起22212,环形凸起22212与轨道贴合,起到限位作用,有轨铁轮2221中心贯穿有铁轮转杆22211,胶轮转杆22221与铁轮转杆22211共轴设置,两者通过螺栓固设连接从而将有轨铁轮2221和无轨胶轮2222连接,实现轨铁轮2221和无轨胶轮2222的同步运动;当然,也可采用其他方式实现连接,如无轨胶轮2222的刚性框架结构与有轨铁轮2221采用一体拉伸成型的工艺,使有轨铁轮2221和无轨胶轮2222形成一体式结构,其刚度硬度极佳且不会产生连接部位的松动开裂老化等情况;有轨铁轮2221和无轨胶轮2222根据使用场合择一使用,具体来说,当小车在有轨路段行进时,通过有轨铁轮2221与轨道的相对运动实现小车的行进;当小车在无轨路段行进时,通过无轨胶轮2222与地面的相对运动实现小车的行进。
如图7所示,第一车轮连接部2214由上连接部22141和下连接部22142组成,两者通过第一紧固件固设连接,上连接部22141连接第一弹簧液压机构2216以及第二连接部2213,下连接部22142包括中空的贯穿孔22144,贯穿孔22144内部固设有贯穿孔固定件22145,行进电机23的输出轴与铁轮转杆22211连接,并通过第二紧固件与贯穿孔固定件22145固设连接。
如图6所示,从动驱动组件223包括从动支架结构和从动车轮结构,从动支架结构包括第二支架固定板2231、第三连接部2232、第四连接部2233、第二车轮连接部2234和第四车轮连接部2235,第二支架固定板2231固定于第二支架固定板2231的下端面,第三连接部2232上固定设置有第二悬挂部2237,用于备用轮胎的悬挂放置;为在行进过程进行缓冲,保证电子器件的稳定运行,从动驱动组件223还包括用于缓冲的第二弹簧液压机构2236,第二支架固定板2231、第三连接部2232、第四连接部2233以及第二弹簧液压机构2236分别通过螺栓连接,第二车轮连接部2234设置为Z型结构,一端连接第四连接部2233以及第二弹簧液压机构2236,另一端连接第四车轮连接部2235,第四车轮连接部2235采用门型结构,第四车轮连接部2235与车轮连接部2235的上端固设连接,车轮连接部2235的两组侧板与从动车轮结构连接,本实施例中,从动车轮结构与主动车轮结构采用相同的连接方式,车轮连接部2235的两组侧板组成的区域将有轨铁轮2221限制在内部,且侧板与铁轮转杆22211连接。
小车还包括基础运行模块、里程模块、视觉模块和测量模块,基础运行模小车防撞并对异常情况进行报警,里程模块记录里程数据,视觉模块在无GPS信号时进行定位以及记录行进距离,测量模块检测轨道上电参数。
基础运行模块包括锂离子电池31、电源转换器32、防撞机构33、安保机构34;电源转换器32与主控制器11建立数据连接并与锂离子电池31采用电路连接实现锂离子电池31随主控制器11的指令进行输出电流与输出电压的转换目的,防撞机构33包括防撞雷达331、防撞梁332和限位开关333,防撞雷达331固定在承载框架21两侧,且位于小车行进方向的两侧,防撞雷达331与主控制器11建立数据连接,用于感应小车在行进方向的前后位置是否有障碍并完成避障或停止动作,防撞雷达331可采用现有的设备,如毫米波雷达,防撞梁332固定在承载框架21两侧,且位于小车行进方向的两侧,防止出现防撞雷达331未能阻止高速运动物体发生碰撞的情况时采取的紧急机械防撞,其中限位开关333固设在防撞梁332的两侧,并与主控制器11建立数据连接,用于在感受到防撞梁332所受到的冲击力后反馈给主控制器11并下达指令控制行进模块紧急停止;安保机构34包括报警装置341和急停装置342,报警装置341和急停装置342分别与主控制器11建立数据连接,在检测内部数据返回异常信号时触发报警装置341,急停装置342位于小车本体的外部,用于在正在运行的小车发生故障且信号接收异常时或紧急情况发生时操作人员手动关闭装置。
喷码模块包括字符喷码装置41、墨盒42、防尘外壳43、舵机44、吹尘机构45、定基机构46、运动机构47;墨盒42插入字符喷码装置41,且字符喷码装置41的插入口位于侧边,便于更换,字符喷码装置41与主控制器11建立数据连接;字符喷码装置41的底部固设有喷口411,由喷口411进行喷码,定基机构46位于字符喷码装置41的底部,防尘外壳43将字符喷码装置41喷口411底部和定基机构46包裹,防尘外壳43连接有固定板48,通过固定板48与运动机构47连接,防尘外壳43与字符喷码装置41连接,即运动机构47通过控制防尘外壳43的移动进而控制字符喷码装置41的移动,从而将字符喷码装置41移动至指定的喷码位置;防尘外壳43侧面固设有底部门帘431,舵机44位于底部门帘431的内侧,通过传动机构与底部门帘431联动,并与主控制器11建立数据连接,用于启闭底部门帘431并完成启闭的确认操作;防尘外壳43底部设置有限位板432,限位板432上固设有限位槽4321,字符喷码装置41的喷口411穿过限位槽4321,限位板432两侧分别延展出两组连接部433,每组连接部433上设置有穿透孔434,定基机构46穿过穿透孔434并与连接部433转动连接。
定基机构46包括平面滚轮461、压力传感器和计数器,平面滚轮461的两组端面沿中轴线方向设置有凸起并穿过穿透孔434实现平面滚轮461的绕轴转动,压力传感器和计数器位于平面滚轮461的内部与主控制器11建立数据连接,用于确定平面滚轮461在枕木平面上贴面稳定动作进而保证字符喷码装置41的喷口411的喷涂基准面。
吹尘机构45包括压缩气泵451、输气管452和气吹喷嘴453,压缩气泵451通过输气管452与气吹喷嘴453连接,将压缩气体从气吹喷嘴453中喷出,清理字符喷码装置41喷口411处的粉尘,压缩气泵451与主控制器11建立数据连接。
运动机构47包括平移运动机构471和升降运动机构472,平移运动机构471包括平移丝杆行架4711和平移驱动电机4713,平移丝杆行架4711的两端固设有平移基块4715,平移丝杆行架4711底面固设有两组对称设置的平移滑轨4712,平移滑轨4712的长度方向与平移丝杆行架4711的长度方向一致,平移驱动电机4713固设在平移基块4715,平移驱动电机4713的输出轴与丝杆4716固设,平移丝杆4716的另一端与平移基块4715转动连接,丝杆4716上螺旋连接有与平移滑轨4712滑动连接的平移滑块4714,平移驱动电机4713驱动平移滑块4714沿平移滑轨4712平移运动。
升降运动机构471包括升降丝杆行架4721和升降驱动电机4723,升降丝杆行架4721的两端固设有升降基块4725,升降丝杆行架4721底面固设有两组对称设置的升降滑轨4722,升降滑轨4722的长度方向与升降丝杆行架4721的长度方向一致,升降驱动电机4723固设在升降基块4725,升降驱动电机4723的输出轴与丝杆4726固设,升降丝杆4726的另一端与升降基块4725转动连接,丝杆4726上螺旋连接有与升降滑轨4722滑动连接的升降滑块4724,升降驱动电机4723驱动升降滑块4724沿升降滑轨4722升降运动,本实施例中,升降基块4725与平移滑块4714固设连接,防尘外壳43通过固定板48与升降滑块4724固设连接,从而将平移运动和升降运动结合,将字符喷码装置41移动至指定的位置进行喷码操作;平移驱动电机4713和升降驱动电机4723分别与主控制器11建立数据连接。
如图10所示,进一步的,为避免因枕木倾斜导致字符喷码装置41喷码产生畸变,喷码模块还包括调节机构49,调节机构49调节喷口411的平面自由度,使喷口411平面和枕木表面保持平行,保证喷码的效果。
调节机构49包括两组调节弹簧491,两组调节弹簧491的一端对称固设在限位板432的两侧,两组调节弹簧491的另一端与防尘外壳43连接,且两者的连接方式,使调节弹簧491的移动不会带动防尘外壳43的移动,字符喷码装置41与限位板432连接,并随限位板432的移动同步移动,使喷口411与限位板432平面保持在同一平面,使喷口411平面和枕木表面保持平行,通过上述结构,使防尘外壳43与字符喷码装置41的单独运动,两者运动不会发生干涉。
平面滚轮461与枕木平面产生接触,在倾斜的枕木上,导致两组调节弹簧491的受力不同,进而影响两组调节弹簧491收缩程度,不同收缩程度的调节弹簧491给与限位板432不同的压力,进而控制限位板432倾斜,从而带动字符喷码装置41贴合倾斜枕木的表面,保证喷码的效果。
里程模块包括里程计51、RTK卫星定位装置一52和RTK卫星定位装置二53,里程计51、RTK卫星定位装置一52和RTK卫星定位装置二53分别固设在承载框架21上,同时里程计51和RTK卫星定位装置一52建立数据连接后与主控制器11共同建立数据连接,其中里程计51与光电编码器24建立数据连接。
里程测量采用里程计51或/和RTK定位系统,里程计51记录行进距离数据和行进路线数据(里程测量),并对数据进行计算和存储,RTK定位系统包括RTK卫星定位装置一52、RTK卫星定位装置二53以及基准站,基准站通过数据链将其观测值和测站坐标信息传送给小车,RTK定位系统对里程计51记录的数据进行校准,保证数据的准确度。
视觉模块包括云台61、二维摄像头一62、二维摄像头二63、二维摄像头三64、二维摄像头四65和三维扫描仪66,云台61安装在小车的前端,且通过安装架固定设置在承载框架21上,三维扫描仪66固定于云台61上,二维摄像头一62位于小车的前端且位于云台61下方,二维摄像头二63以及二维摄像头三64位于小车的左右两端且固设在承载框架21,二维摄像头四65固设于防尘外壳43上且与喷码机喷口411位置相对,便于确认喷码机喷口411是否位于指定的喷码位置,三维扫描仪61、二维摄像头一62、二维摄像头二63、二维摄像头三64、二维摄像头四65分别与主控制器11建立数据连接,三维扫描仪66与RTK卫星定位装置二53建立数据连接后与主控制器11共同建立数据连接;其中,在隧道内采用三维扫描仪66和RTK卫星定位装置二53进行里程测量,在隧道外采用里程计51和RTK卫星定位装置一52进行里程测量;当然在光线暗、信号弱的隧道内,优选采用三维扫描仪66对里程计51测量的里程进行优化和校准。
测量模块自动测量轨道的电参数,电参数包括电路电压、电流、载频和补偿电容,测量模块包括车载移频测试装置71、第一连接导线72、第二连接导线73、第一自动顶压机构74、第一自动顶压机构75、第一检测探头76和第二检测探头77,本实施例中,第一自动顶压机构74和第一自动顶压机构75采用相同结构,第一检测探头76和第二检测探头77采用相同结构,第一自动顶压机构74和第一检测探头76固定连接,第一自动顶压机构75和第二检测探头77固定连接,第一自动顶压机构74和第一自动顶压机构75对称固设在承载框架21的左右两侧,以第一自动顶压机构75和第二检测探头77为例进行说明,第一自动顶压机构75包括L型连接框架751、安装平台752、顶压电机753和伸缩连杆754,L型连接框架751固定设置在承载框架21上,安装平台752固定在L型连接框架751的底端,顶压电机753和伸缩连杆754安装于安装平台752,顶压电机753的驱动杆与伸缩连杆754连接实现伸缩连杆754的上下运动;第二检测探头77包括连接平台771、连接螺栓772和检测探针773,连接平台771固定于伸缩连杆754的底端,连接平台771与伸缩连杆754采用绝缘方式连接或连接平台771本身为绝缘材料,检测探针773与连接螺栓772采用端面非绝缘连接方式实现导电一体式连接,检测探针773通过连接螺栓772与连接平台771固定连接,实现可靠接触以及稳定数据的采集,顶压电机753控制检测探针773上移至指定测量位置实现对参数的测量,指定测量位置具体为:在检测探针773刺破铁轨的表面氧化层与实际材料部位充分接触的位置。
本实施例中,检测探针773设置有多组,确保探针与轨道可靠接触并实现电气信号测量;车载移频测试装置71通过第一连接导线72与第一检测探头76电路连接,通过第二连接导线73与第二检测探头77电路连接,具体为第一连接导线72的一端连接车载移频测试装置71的电压接入端,第一连接导线72的另一端连接第一检测探头76的连接螺栓,通过连接螺栓压紧第一连接导线72的触点连接处,第二连接导线73的一端连接车载移频测试装置71的电压接入端,第二连接导线73的另一端连接第二检测探头77的连接螺栓772,通过连接螺栓772压紧第二连接导线73的触点连接处,通过上述结构实现开路电压的测量,车载移频测试装置71还设置有钳形表78,钳形表78与车载移频测试装置71的电流接入端相连实现短路电流的测量,其中,车载移频测试装置71与主控制器11建立数据连接,可采用蓝牙通信连接,第一自动顶压机构74、第一自动顶压机构75内的顶压电机与主控制器11建立数据连接,其中在检测探头上设置多个检测探针773是为了确保探针与轨道可靠接触并实现电气信号测量。
为防止小车在行进过程中遇到不平整路面或不平整轨道时导致三维扫描仪66扫描画面模糊或整体扫描画面抖动出现数据偏差以及小车本体抖动对电子设备稳定运行的影响,小车上设置减震机构(图未显示)用以抵消装置行进过程中的抖动,减震机构可采用弹簧减震器,将弹簧减震器安装在承载框架21,或在承载框架21上设置上下两根支撑横梁,并在两根支撑横梁之间垫上具有一定弹性和软度的硬橡胶垫片,优选采用硬橡胶垫片进行减震,硬橡胶垫片能吸收震动能量且无回弹现象,进一步保证三维扫描仪66所获取的三维数据的精度以及后期系统中虚拟三维模型的构建。
本实施例中,字符喷码装置41、三维扫描仪66以及车载移频测试装置71采用便于拆卸的模块化安装,以适应不同工作场景中所对应的测量任务和执行任务,小车的模块化安装实现对应功能模块的装卸达到尽可能降低重量的目的,此外,可调整基础运行模块中锂离子电池31的数量,并关闭部分模块的供电。
本实施例中,三维扫描仪66对轨旁信号设备和接触线到轨道中心的距离进行测量。
本实施例中,二维摄像头一62、二维摄像头二63以及二维摄像头三64对设备进行识别和信息获取,实现对轨旁的信号设备进行识别,达到自动校核和更新设备位置信息的目的。
本实施例中,除防撞机构33和安保机构34提高安全性外,还可通过二维摄像头一62、二维摄像头二63以及二维摄像头三64对小车行进方向的1米范围内的障碍物和人进行检测,当在1米范围内存在障碍物和人自动停车并发出告警,防止施工人员无意在铁轨上行走而受伤;另外还可通过电机死锁和机械抱闸卡死的方式可靠停车,防止小车在倾斜度较高的铁轨上溜车而造成不必要的事故,进一步保证了运行安全性。
本实施例中,可以根据测试项目自动切换线路的通断,实现开路测量电压和短路测量电流的功能。
本实施例中,通过装置本体触控屏102上、远程遥控手柄、二维摄像头四65以及RTK定位系统实现小车在临时中断工作后继续工作的目的。
本实施例,在数据的导入和导出功能中,可以将Excel格式的铁路信号工程数据导入装置,根据数据表格信息,实现小车自动定位、测量并标记的功能。也可以将数据从装置接口通过U盘导出,对接到智慧工地的数据平台上。
实施例二
如图14所示,本实施例与实施例一的区别在于,实施例一中,调节机构49通过弹簧的收缩调节喷口411的平面自由度,而本实施例中,
调节机构49包括两组伸缩杆492,两组伸缩杆492的一端对称固设在限位板432的两侧,两组伸缩杆492的另一端与与机械电机或液压机相连,通过机械电机或液压机驱动进行伸缩,机械电机或液压机固定在防尘外壳43上,字符喷码装置41与限位板432连接,并随限位板432的移动同步移动,使喷口411与限位板432平面保持在同一平面,使喷口411平面和枕木表面保持平行。
平面滚轮461与枕木平面产生接触,在倾斜的枕木上,平面滚轮461内部的压力传感器462所测量的两侧压力值不同,通过机械电机或液压机调节伸缩杆492长度直至压力传感器所测量的两侧压力值相同,此时限位板432倾斜,带动字符喷码装置41贴合倾斜枕木的表面,保证喷码的效果。
本发明还提供了一种具备工程数据检测功能的便携式智能测量小车的操作方法,该方法通过上述智能测量小车中的控制模块控制行进模块行移动至枕木的喷码位置,喷码模块对枕木进行二维码喷涂操作。
根据本发明,具体的操作方法如下:
S1.控制模块控制行进模块带动小车直行或转动;
S2.视觉模块确认小车的位置;
S3.喷码模块对枕木喷码;
S4.里程计51记录小车里程数据;
S5.RTK定位系统/三维扫描仪66校准小车里程数据;
S6.视觉模块记录轨旁数据;
S7.测量模块测量轨道参数。
其中S1步骤中中小车转动包括如下步骤:
S11.主控制器101对电机控制器13下达相应的固定转速指令;
S12.电机控制器13将一侧主动车轮结构的行进电机23下达固定转速命令下达,将另一侧主动车轮结构的行进电机23下达固定转速命令下达。
S2中确认小车的位置包括如下步骤:
S21.通过二维摄像头四605确定小车底部需要喷码的枕木位置;
S22.行进模块控制小车移动至二维摄像头四605确S21步骤中的枕木位置;
S23.主控制器11控制行进电机23实现电气自锁,将小车停留在S22中的位置。
其中S3中枕木喷涂包括如下步骤:
S31.舵机44开启门帘底部门帘431;
S32.吹尘机构45清扫喷口411;
S33.主控制器11启动控制升降驱动电机4723将字符喷码装置41移动至平面滚轮461与枕木接触并给与枕木对应的压力值位置后停止,调节机构49调平喷口411所在平面以及枕木所在平面;
S34.主控制器11启动控制平移驱动电机4713带动平面滚轮461在枕木上滚动,设定计算公式确认喷口411所在平面与枕木所在平面平行;
S34.主控制器11控制字符喷码装置41从左右方向或前后方向完成二维码的喷涂。
其中S32步骤中吹尘机构45清扫喷口411包括以下步骤:
S321.主控制器11启动压缩气泵451产生压缩气体;
S322.输气管452将压缩气体传输至气吹喷嘴453,通过气吹喷嘴453完成喷口4011的清扫工作。
其中S33步骤中压力值的范围设置为5-50Pa,实施例一中,调节机构49的调平步骤包括:
S331.运动机构47控制平面滚轮461与枕木平面接触;
S332.两组调节弹簧491的受力收缩,调节弹簧491收缩量转化为限位板432的压力值,两组调节弹簧491调整收缩量直至收缩量保持一致则完成调平。
实施例二中,调节机构49的调平步骤包括:
S333.机械电机或液压机驱动伸缩杆492控制平面滚轮461与枕木平面接触;
S334.压力传感器测量不同方位的压力值,将压力值反馈至主控制器11,通过内置计算公式将压力差值转化为两个伸缩杆492的调整量,将调整量下达至所述的机械电机或液压机,驱动伸缩杆492进行调整;
S335.通过压力传感器测量调整后的不同方位的压力值,反馈至主控制器11,若压力差值在压力值范围内则完成调平。
其中S34步骤中并设定平移距离为l,平面滚轮461滚动圈数为R;计数器记录的旋转次数为n,并设定电机转矩传动损失系数μ,μ取值0.98;k设定为该系数的阈值,k取值0.05,计算公式设置为:
因计数器安装在平面滚轮461内,故式中,n值与R值相等,通过计算公式比对平面滚轮461滚动圈数与平移距离是否对应,若相互对应则确认字符喷码装置41的喷口411与枕木距离合适并且喷口411所在平面与枕木所在平面平行,可实现二维码的稳定喷涂。
其中S4步骤中记录小车里程数据包括以下步骤:
S41.光电编码器24记录行进电机23的机械几何位移量并将其转换成数字量,即里程;
S42.通过数据通信将步骤S41中的数字量传输至里程计51,里程计51进行数据的收集、计算、存储。
S5步骤中在不同的使用场合采用不同方法校准小车里程数据,具体来说,在光线足、信号的场景中采用RTK定位系统进行校准,包括以下步骤:
S51.基准站将观测值和测站坐标信息传送给小车;
S52.小车通过采用RTK定位系统对组成差分观测值进行实时处理,给出厘米级定位结果。
在隧道此类光线暗、信号弱的场景中采用三维激光扫描仪建模定位的方法对里程计51测量进行优化和校准,具体为:
S53.三维扫描仪66对隧道空间进行全断面非接触扫描测量,获取和存储点云数据,包括实体在同一空间坐标系或参考系下描述目标实体的空间分布和目标表面光谱特性的海量点云数据集合;
S54.通过点云拼接和滤波分析等数字信息化处理,得到空间的三维实体模型,实现对于任意两点距离的测量,推算出相对位移。
其中S6步骤中记录的轨旁数据包括以下步骤:
S61.测量轨旁信号设备和接触线到轨道中心的距离;
S62.识别轨旁信号设备。
S61步骤采用限界测量方法进行测量,包括以下步骤:
S611.当小车到达设备安装位置时,经人工或自动方式停止后,小车启动信号设备限界数据的测量;
S612.三维扫描仪66向不同的方向发射测量激光束,通过反射回的激光束进行数据分析计算,得到轨旁信号设备的限界测量数据;
S613.小车自动记录高于轨面设备的限界信息,包括设备与轨道中心的距离和设备离轨道轨面的高度。
S62步骤中采用人工方式或自动方式进行识别:
人工方式具体包括以下步骤:
S621小车行进至所要复测/校核的信号设备;
S922远程遥控手柄人工遥控停车并发指令至主控制器11操作更新信号设备的实际位置信息;
自动方式具体包括以下步骤:
S623小车行进至轨旁信号设备进入二维摄像头二63摄像范围
S624二维摄像头二63识别轨旁信号设备,自动更新设备位置信息。
S62步骤中的位置信息包含RTK定位数据和里程数据,通过对实现对轨旁信号设备进行识别,达到自动校核和更新设备位置信息的目的。
S7步骤中测量轨道参数包括以下步骤:
S71.行进电机23将小车停止在轨道上,通过两侧的第一自动顶压机构74、第一自动顶压机构75将第一检测探头76和第二检测探头77下降至指定的测量位置;
S72.第一检测探头76和第二检测探头77获取电气信号数据,第一连接导线72和第二连接导线73将信号传导至车载移频测试装置71中;
S73.车载移频测试装置71测量轨道中的电压信号并通过蓝牙传输至主控制器11,设置的正常电压信号进行比对判断轨道电气信号是否有异常。
为实现小车在临时中断工作后继续工作,还包括S8重启工作步骤,具体包括以下步骤:
S81在小车被搬离轨道前,人工在装置本体触控屏102上或远程遥控手柄1上点选暂停工作操作;
S82.通过RTK定位系统和里程计51记录当前的RTK经纬度坐标信息和里程值,并通过字符喷码装置41在枕木喷涂暂停标记点;
S83.当需要继续工作时,人工将小车搬到S82步骤中喷涂的标记点附近,经人工触发后,小车通过二维摄像头四65识别到上一次喷涂的暂停标记点或通过比对上一次中断的RTK经纬度坐标或里程值,自动行驶到上次工作的暂停位置后恢复工作。
显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
- 一种具备工程数据检测功能的便携式智能测量小车
- 一种具备防撞功能的便携式智能测量小车