一种专用于水下侦察的无人潜水器
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及一种潜水器,尤其涉及一种专用于水下侦察的无人潜水器。
背景技术
无人侦察潜水器也称无人驾驶侦察潜艇,其主要用于对敌水下军事设备进行监测与追踪。当前,大多数国家都是通过声呐浮标对敌水下潜艇进行有效的探测与追踪,换句话说,当锁定敌方潜艇的大致行踪后,并在对应处海域抛掷一定数量的浮标,而每个浮标均会通过其一头的声呐传感器搜寻敌方潜艇。由于每个浮标都是漂在水面,又由于海面的风浪较大,故而,投掷在水面的声呐浮标很容易被海水冲走,基于此因,现有声呐浮标的探测功能也就大打折扣。
发明内容
本发明的目的在于克服现有技术的不足,提供一种专用于水下侦察的无人潜水器,该潜水器是通过其塔座上部的声呐传感器来捕捉敌方潜艇,而捕捉到的对方潜艇信息又是由水面的仿生水鸟发送到舰船指挥中心或反潜机上。
本发明的目的是通过以下技术方案来实现的:包括壳体、转向器与仿生水鸟,所述的壳体由合金钢材料制成,所述的壳体为椭圆形,所述的壳体两头分别设成半个椭圆形,所述的壳体一头上侧设有塔座,所述的塔座上侧设有中空撑管,所述的撑管上端设有圆形盘体,所述的盘体外侧均匀设有四个声呐传感器,所述塔座对应的两侧均设有一个水平舵板,所述的壳体另一头上侧设有进出口,所述的进出口配有相匹配的压盖,所述的压盖反面外缘设有密封垫片,靠近进出口一边的壳体上侧设有一个接口,靠近进出口另一边的壳体上侧设有下潜舵板,所述的塔座、盘体、水平舵板、压盖与下潜舵板均由合金钢材料制成;所述壳体内的底部设成水平面,所述的壳体内由隔板隔成前仓与后仓,所述前仓内的下部设有下潜仓,所述的壳体另一头外侧设有出水口,所述后仓空腔内的一边底部纵向设有泵式推进装置,所述后仓另一边底部的一头设有卷线机,拉绳的一头圈紧卷线机一头的卷轮,拉绳的另一头固定在压盖的反面居中处,所述前后仓之间的隔板一处设有线孔,所述下潜仓的一头上侧设有线孔,所述塔座空腔内的底部设有线孔;所述的下潜仓上侧设有两个蓄电池、计算机与充气机,所述的充气机由连接管连通前仓上侧的接口,所述下潜仓内的底部一头纵向设有抽水装置,所述下潜仓内的另一头底部纵向设有排水装置,所述前仓内的前部一头设有转向器,所述转向器下部的转向杆是穿过对应处下潜仓上侧的圆形口子与底部的圆形口子后,并向下延伸一段,所述的转向杆下部设有转向舵板,所述的壳体一头外侧设有摄像头;所述的仿生水鸟由软硅胶材料制成,所述的仿生水鸟下侧设有底盘,所述的底盘下侧设有接口,所述仿生水鸟下侧的接口由气管连通壳体上侧的接口。
附图说明
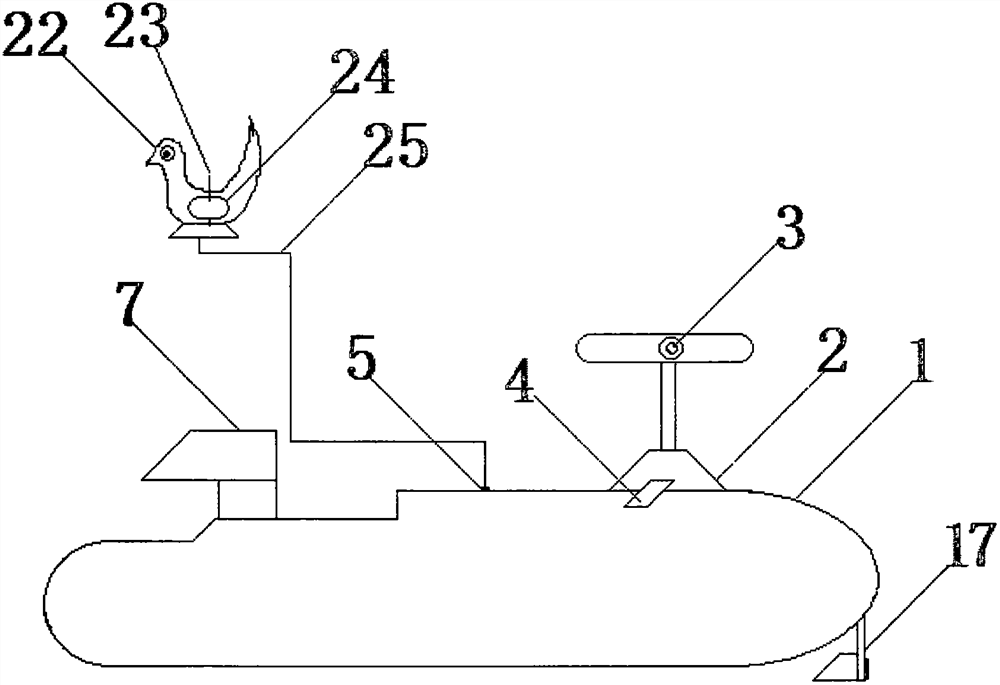
图1为本发明的壳体外部示意图。
图2为本发明的壳体内部示意图。
图3为本发明的整体结构图。
图4为本发明的电路连接示意图。
图5为本发明的转向器构置图。
图6为本发明的整体平面示意图。
其中;1、壳体;2、塔座;3、声呐传感器;4、水平舵板;5、接口;6、压盖;7、下潜舵板;8、推进装置;9、卷线机;10、下潜仓;11、空口子;12、蓄电池;13、抽水装置;14、计算机;15、排水装置;16、充气机;17、转向器;18、摄像头;19、电子仪盘;20、减速电机;21、转向杆;22、仿生水鸟;23、天线;24、PLC控制器;25、气管;
具体实施方式
下面结合附图对本发明进行详细描述。
图1中,所述的壳体1两头均为半个椭圆形,所述的壳体1一头上侧设有圆锥形塔座2,所述的塔座2是由焊接固定在壳体1的一头上侧,所述的塔座2上侧居中处垂直设有中空撑管,所述的撑管下端是由焊接固定在塔座2上侧的圆形口子侧沿,所述的撑管上端设有圆形盘体,所述的撑管上端是由焊接固定在盘体下侧居中处的圆洞侧沿,所述的盘体内部为空腔,所述的盘体空腔内、撑管空腔内与塔座2空腔内均是贯通,所述的盘体外侧均匀设有四个声呐传感器3,所述的每个声呐传感器3均是由航空胶水密封固定在对应处盘体外侧的圆槽内,所述塔座2对应的两侧均设有用于壳体1水平行驶的水平舵板4,所述的壳体1另一头上侧设有长方形的进出口,且进出口的外缘设有用于压盖6密封盖紧的硅胶皮,所述的进出口配有相匹配的压盖6,所述的压盖6一侧内沿与对应处进出口内侧之间是由两个铰链连接,所述的压盖6反面外缘设有用于密封的硅胶垫片,所述的硅胶垫片是由航空胶水固定在压盖6的反面外缘,靠近进出口一边的壳体1上侧设有带内螺纹的接口5,靠近进出口另一边的壳体1上侧垂直设有便以潜水器垂直下潜的下潜舵板7,所述的壳体1一头上侧是指壳体1前面一头的上侧,所述的壳体1长度与直径分别为2.5m与1.6m。
图2包括图1,所述壳体1空腔内的底部设成水平面,所述的壳体1内由隔板隔成前仓与后仓,所述前仓内的下部设有下潜仓10,所述前仓空腔内的下部是由隔板呈水平状纵向隔成一个下潜仓10,所述的下潜仓10内为封闭结构,所述的壳体1另一头外侧设有出水口,所述的壳体1另一头是指壳体1的后面一头,所述后仓空腔内的一边底部纵向设有泵式推进装置8,所述的推进装置8由水泵、进水管与出水管组成,所述的进水管一头连通水泵一头的进水接口,所述的进水管另一头由焊接固定在后仓一边底部一头进水口侧沿,所述的出水管一头连通水泵另一头的出水接口,所述的出水管另一头由焊接固定在后仓另一头内壁体的出水口侧沿,所述的水泵是由焊接固定在后仓一边底部的居中处,所述的水泵为2000W的离心率水泵,所述后仓另一边底部的一头纵向设有卷线机9,所述卷线机9一头的卷轮对着压盖6的反面居中处,拉绳的一头圈紧卷线机9一头的卷轮,所述的拉绳另一头由焊接固定在压盖6的反面居中处,所述的拉绳由细钢丝搓成后,并再由特种胶水粘紧固定;所述的下潜仓10也称蓄水仓,所述下潜仓10内的底部居中处平排设有两个圆形空口子11,所述的两个空口子11分别为进水口与出水口,所述前后仓之间的隔板一处设有线孔,所述的下潜仓10一头上侧设有线孔,所述塔座2空腔内的底部设有线孔。
图3包括图2,在所述的前仓内,所述的下潜仓10上侧平排设有两个蓄电池12、计算机14与充气机16,所述的两个蓄电池12由盒体装着,所述的盒体是由焊接固定在对应处下潜仓10的上侧,所述的计算机14与充气机16均是由梅花螺杆固定在对应处下潜仓10的上侧,所述的充气机16由连接管连通前仓上侧的接口5,所述充气机16的输出功率为300W,所述下潜仓10内的底部一头纵向设有抽水装置13,所述的抽水装置13由抽水水泵、进水管与出水管组成,所述的抽水水泵由圆柱形箱体呈封闭状装着,所述的进水管一头穿过箱体一头外侧的管孔后,并再连通抽水水泵一头的进水接口,所述的进水管另一头由焊接固定在一个空口子11的侧沿,所述的出水管一头穿过箱体另一头的管孔后,并再连通抽水水泵另一头的出水接口,所述的出水管另一头往下垂直弯曲一段,所述的出水管另一头端口与对应处下潜仓10内的底部相隔4cm的间距,所述箱体内的长度与直径均大于抽水水泵的长度与直径,换句话说,抽水水泵与箱体内壁体之间留有较大的空间,所述箱体一头的管孔内侧与对应处进水管外围之间由特种软胶密封固定,所述箱体另一头的管孔内侧与对应处出水管外围之间也由特种软胶密封固定,这样,下潜仓10内的水就不会渗进箱体内。
所述下潜仓10内的另一头底部纵向设有排水装置15,所述的排水装置15由排水水泵、进水管与出水管组成,所述的排水水泵也由一个圆柱形箱体装着,所述的出水管一头穿过箱体一头的管孔后,并再连通排水水泵一头的出水接口,所述的出水管另一头由焊接固定在另一个空口子11侧沿,所述的进水管一头穿过箱体另一头的管孔后,并再连通排水水泵另一头的进水接口,所述的进水管另一头往下垂直弯曲一段,所述箱体内的长度与直径均大于排水水泵的长度与直径,换句话说,排水水泵与箱体内壁体之间留有较大的空间,所述箱体一头的管孔内侧与对应处进水管外围之间由特种软胶密封固定,所述箱体另一头的管孔内侧与对应处出水管外围之间也由特种软胶密封固定。
抽水水泵与排水水泵的功率均为1500W,抽水装置13是将外面的水抽进下潜仓10内,如潜水器进行下潜时,则抽水装置13就会按照设定的时间将下潜仓10内抽进八成满的水,这样,潜水器就会下潜到所能承受的深度,总之,潜水器下潜的深度是根据下潜仓10内的水量来决定;如潜水器进行上浮时,则排水装置15就会按照设定的时间将下潜仓10内的水排出,当下潜仓10内的水排出八成时,则潜水器就会浮起,并露出整个上侧,为了保证壳体1的重心始终向下,故而,潜水器每次上浮时,则其下潜仓10内的水都不会排完;由于抽水水泵与排水水泵均由一个箱体呈封闭性装住,故而,下潜仓10内的水就不会渗进两个箱体内,而两个水泵工作时产生的热温又会被下潜仓10内的水所消耗。
所述壳体1前仓内的前部一头设有转向器17,参见图3与图5,所述转向器17下部的转向杆21是穿过对应处下潜仓10上侧的圆形口子与底部的圆形口子后,并向下延伸一段,所述的转向杆21一侧下部设有转向舵板,所述下潜仓10一头上侧的圆形口子内侧与对应处转向杆21外围之间由特种软胶密封固定,所述下潜仓10一头底部的圆形口子内侧与对应处转向杆21外围之间也由特种软胶密封固定,所述的壳体1一头外侧设有高清度摄像头18,所述的摄像头18是由航空胶水密封固定在壳体1一头外侧的圆槽内。
图4包括图3,所述的每个声呐传感器3与摄像头18均由电路连接计算机14的信息输入端,所述的推进装置8、卷线机9、充气机16、抽水装置13、排水装置15与转向器17均由电路连接计算机14的电源输出端,所述计算机14的电源输入端由电路连接蓄电池12,所述的两个蓄电池12均为48V20Ah的锂电池,所述的两个蓄电池12可连续使用5-6天;所述每个声呐传感器3的电路是往上穿过塔座2底部的线孔后,并再延伸连接,所述卷线机9与推进装置8的电路均是穿过后仓隔板上的线孔后,并再延伸连接,所述抽水装置13与排水装置15的电路均是往下穿过下潜仓10一头上侧的线孔后,并再延伸连接,所述的每个线孔内侧与对应处电路外围之间均由特种软胶密封固定。
计算机14可控制推进装置8的启动时间与关闭时间,也就是说,当潜水器处于水下静默状态时,则计算机14就会关闭推进装置8的电源;计算机14可控制抽水装置13的启动时间与关闭时间,也就是说,当潜水器下潜到一定程度时,则计算机14就会关闭抽水装置13的电源;计算机14可控制排水装置15的启动时间与关闭时间,也就是说,当到了设定的时间,则计算机14就会启动排水装置15,并将下潜仓10内的水排出;计算机14可控制卷线机9的启动时间与关闭时间,也就是说,当潜水器需要下潜时,则计算机14就会启动卷线机9,并往下收紧拉绳,当拉绳收到极限时,则压盖6就会呈封闭状盖住进出口。
计算机14还可控制转向器17的转向操作,也就是说,计算机14可随时修正潜水器的行驶方向;如前方出现海峰时,则摄像头18就会将摄取的图像信息传到计算机14内,信息处理后,则计算机14就会将修正后的转向指令传输到转向器17的单片机内,单片机接到信息指令后,则其就会按修正后的转向角度驱动减速电机20;如前方发现敌潜艇的信号时,则声呐传感器3就会将收集到的信号传到计算机14内,信号经过解码处理后,则计算机14就会将修正后的转向指令传输到转向器17的单片机内,单片机接到信息指令后,则其就会按修正后的转向角度驱动减速电机20,并将潜水器规避到安全处,在潜水器的生存环境得到保障后,则仿生水鸟22就会将探测到的敌方信息发送至舰船指挥中心。
图5包括转向器17,转向器17由电子仪盘19、减速电机20与转向杆21组成,所述的电子仪盘19上侧均匀设有代表转向角度的数字标识,所述的电子仪盘19内设有用于控制转向角度的C51单片机,所述的电子仪盘19设在减速电机20上侧,所述的转向杆21上端设有齿轮盘,所述的转向杆21下部设有转向舵板,所述的转向舵板朝后,所述减速电机20下部的齿轮与转向杆21上端的齿轮盘嵌入衔接,所述的电子仪盘19由电路分别连接减速电机20与计算机14。
转向器17设在壳体1的前部一不影响转向操作,二可提高转向的灵活性。
图6包括图4与图5,所述的仿生水鸟22也称浮动发送装置,所述的仿生水鸟22上侧垂直设有天线23,所述的天线23是隐藏在仿生水鸟22中间凹陷段的上侧,所述的仿生水鸟22下侧设有用于稳定重心的锥形底盘,所述的锥形底盘下侧设有带内螺纹的接口5,所述仿生水鸟22下侧的接口5由气管25连通壳体1上侧的接口5;所述的仿生水鸟22内部为空腔,所述仿生水鸟22的空腔内与锥形底盘的空腔内贯通,所述的气管25由内管与外管组成,所述的内管由软硅胶材料制成,所述的外管为可扭曲的合金软管,所述的外管套紧内管后,并再由特种软胶固定,所述的合金软管与浴室蓬头的软连接管结构相同。
所述气管25两头的接头是拧进仿生水鸟22下侧的接口5与壳体1上侧的接口5内,所述的气管25至少有300M长;由于所述的气管25是由内外两层组合构置,故而,其整体的受重能力远大于仿生水鸟22在水里所受的阻力。
所述的仿生水鸟22内设有PLC控制器24,所述的天线23由电路连接PLC控制器24,所述的PLC控制器24由电路连接计算机14,该电路是穿过锥形底盘下侧的接口5与气管25内部空腔后,并再连接计算机14。
PLC控制器24有编辑解码、修改程序、信息储存、逻辑换算、通讯发射与通讯接收等功能,在得到北斗卫星授权后,则PLC控制器24可将声呐传感器3收集到的信息无线发送到舰船指挥中心,也可收到舰船指挥中心的信息指令。
计算机14可控制充气机16的启动时间与关闭时间,也就是说,当到了设定好的时间,则计算机14就会启动充气机16,在气体上输的同时,而仿生水鸟22就会呈游弋状冒出水面,这时,潜水器与舰船指挥中心的通讯路径就已连通。
当充气机16不停的充气时,则仿生水鸟22就会平稳的浮在水面,而当充气机16停止充气时,则仿生水鸟22就会消气变形,而消气变形后的仿生水鸟22又会随着锥形底盘下沉,并隐藏到水里,仿生水鸟22的内部为封闭式结构。
压盖6打开后,则维修人员就可进入壳体1内,当到了设定好的时间,则壳体1就会浮到水面,这时,计算机14就会逆势启动卷线机9,并松开拉绳,当拉绳松开到一定程度时,则压盖6就会自动弹开,这样,外面的新鲜空气就可进入壳体1内;由于压盖6是靠拉绳往下拉紧并封死进出口,故而,当拉绳松开时,则压盖6反面的硅胶皮与进出口外缘的硅胶皮就会产生一定的弹力。
由于本潜水器是执行长时间的侦察任务,又由于海底的压力过大,故而,其下潜深度一般不会超过所能承受的极限深度,换句话说,如本潜水器下潜的极限深度为5000m,而其执行任务时的最大深度则是4800m,本潜水器的潜行操作也可由舰船指挥中心远程遥控;本潜水器是通过水泵抽水下潜,抽水下潜相比于压缩下潜:一是主机产生的动静小,二是水面看不到尾浪与波纹。
由于本潜水器的壳体1较小,又由于推进装置8推进时所产生的动静较小,故而,其很难被敌方潜艇发现;由于仿生水鸟22是仿制体型较大的海鸟,故而,其具有较好的隐蔽性;由于仿生水鸟22每次发送完信息就会潜进水里,因此,敌方的反潜系统很难侦测到本潜水器的行踪。
- 一种专用于水下侦察的无人潜水器
- 一种专用于水下侦察的无人潜水器