一种桥梁裂缝探伤爬壁机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于机器人领域,具体涉及一种桥梁裂缝探伤爬壁机器人。
背景技术
为了及早发现桥梁的病害异常,爬壁机器人这类智能化探伤检测设备已经逐渐代替检测人员到达桥梁建筑物等高危场地执行检查任务。目前已有的轮式结构的爬壁机器人,设备越障能力、地形适应能力差、转弯效率低,或转外半径大,只能适用于地形内不太复杂的情况;目前已有的履带式爬壁机器人,设备速度相对较低、效率低、运动噪声较大;目前已有的足式爬壁机器人,设备虽然越障能力和速度大大提高,但难以携带摄像机平稳运行,严重影响检测的准确性,同时系统控制上的复杂性大大提高,使得走行和吸附转化动态特性稳定难以维持。
发明内容
针对现有技术中爬壁机器人走行、吸附不稳定的问题,提供一种桥梁裂缝探伤爬壁机器人。
本发明采用如下技术方案:
一种桥梁裂缝探伤爬壁机器人,包括上三角框架和下三角框架,上三角框架和下三角框架的中心均具有一个圆柱形的连接体,连接体的外侧壁上均向外延伸连接有三个连接臂,连接臂的末端具有开口,开口内连接定位套,定位套内连接有气缸,气缸的伸缩杆竖直朝下设置,气缸的伸缩杆上连接有吸盘连接件,吸盘连接件的下端连接有海绵真空吸盘;
上三角框架的连接体底面固定连接有转动电机,转动电机的转轴朝下设置,转动电机的转轴上通过转动连接杆连接有圆环式转盘,转动电机转轴带动圆环式转盘转动;
下三角框架的其中一个连接臂上固定连接有两条平行设置的直线导轨,每个直线导轨上滑动连接有一个导向块,导向块的顶端与导向块固定架的底端固连,导向块固定架的顶端与圆环式转盘固连,圆环式转盘的底面还固连有两个车轮固定架,两个车轮固定架分别与一个直线导轨对应连接,每个车轮固定架的底端均连接有限位车轮,每个车轮固定架底端的限位车轮具有多个,分别设置在该直线导轨的顶面、侧面和底面上。
导向块的作用包括:提高了上三角框架在沿直线轨道运动的过程中的稳定性,也是上三角框架在沿直线轨道运动的过程中的制动装置,弥补了限位车轮在连接上、下三角框架作用中刚度不足的缺陷,提升了上三角框架和下三角框架的整体稳定性和完成下三角框架和直线轨道一起旋转到机器人前进方向的运动过程的可靠性。
优选地,下三角框架的连接臂底面上均连接有万向轮。万向轮在下三角框架旋转过程中起到支撑作用。
优选地,每个直线导轨的两端设置有限位装置,防止导向块在滑动过程中脱离直线导轨。
优选地,上、下三角框架的三个连接臂之间的夹角均为120°。
优选地,每个限位车轮均连接有一个移动电机,移动电机驱动限位车轮移动。
优选地,下三角框架的连接体底面设置有摄像机固定台,摄像机固定台上连接TP—Link摄像机,摄像机可以高清拍摄桥梁裂缝。
与现有技术相比,本发明的有益效果是:
本发明通过框架式设计结构,在最大程度减小系统控制上的复杂性和保证走行和吸附转化动态特性稳定的同时,增加了足部的三个自由度,扩展了吸附方向,相比于履带式、框架式和轮式机器人,该设备越障性更强。
本发明能够在粗糙混凝土表面利用海绵真空吸盘组实现稳固吸附,整个吸盘与混凝土表面接触的海绵由于其柔软和可塑性,能够很好地与那些不平整的表面充分接触到,整块海绵可以很好地保持密封真空性能,保证设备携带摄像机平稳运行,增强检测的准确性。、
本发明可用于各建筑物例如桥梁上下边结构即人力难以长时间维持或耗费巨大位置的数据传输与探伤。
附图说明
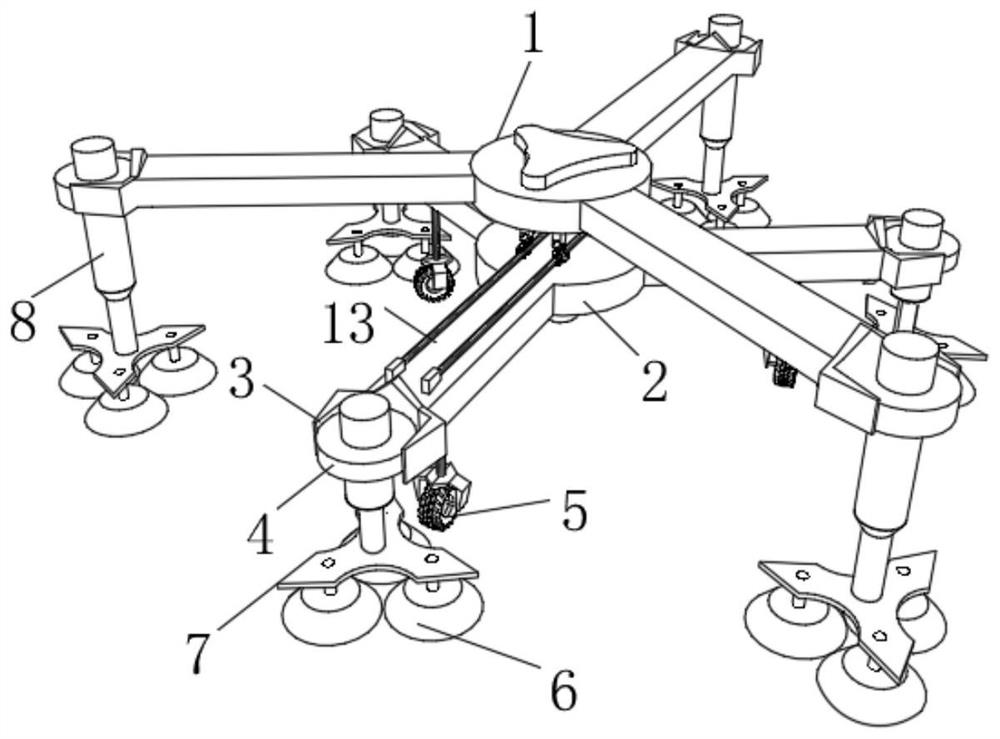
图1显示了本发明的整体结构;
图2显示了导向机构的结构;
图3显示了圆环式转盘与转动连接杆的结构;
图4显示了本发明搭载检测设备的结构;
图5显示了圆环式转盘、转动电机及转动连接杆的连接结构。
具体实施方式
下面通过具体实施方式对本发明作进一步详细说明。但本领域技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术或条件者,按照本领域内的文献所描述的技术或条件按照说明书进行。
如图1-5所示,一种桥梁裂缝探伤爬壁机器人,包括上三角框架1、下三角框架2、开口3、定位套4、万向轮5、海绵真空吸盘6、吸盘连接件7、气缸8、圆环式转盘9、转动电机10、转动连接杆11、直线导轨13、导向块14、限位车轮15、车轮固定架16、导向块固定架17等技术特征。
上三角框架和下三角框架的中心均具有一个圆柱形的连接体,连接体的外侧壁上均向外延伸连接有三个连接臂,连接臂的末端具有开口3,开口内连接定位套4,定位套内连接有气缸8,气缸的伸缩杆竖直朝下设置,气缸的伸缩杆上连接有吸盘连接件7,吸盘连接件7的下端连接有海绵真空吸盘6,海绵真空吸盘能够吸附在地面上。
上三角框架的连接体底面固定连接有转动电机10,转动电机的转轴朝下设置,转动电机的转轴上通过转动连接杆11连接有圆环式转盘9,转动电机转轴带动圆环式转盘转动。
下三角框架的其中一个连接臂上固定连接有两条平行的直线导轨13,每个直线导轨上滑动连接有一个导向块14,导向块的顶端与导向块固定架17的底端固连,导向块固定架的顶端与圆环式转盘固连,圆环式转盘的底面还固连有两个车轮固定架16,每个车轮固定架的底端均连接有限位车轮15,两个车轮固定架分别与一个直线导轨对应连接,每个车轮固定架底端的限位车轮15具有多个,分别设置在对应直线导轨的顶面、侧面和底面上。
每个限位车轮上均连接有一个移动电机,驱动上三角框架在直线导轨上移动,直线轨道两侧的限位车轮起到保证上三角框架和下三角框架在移动过程中的整体稳定性,保证下三角框架和直线轨道一起在转动电机驱动旋转过程中的整体稳定性。
本实施例中,下三角框架的连接臂底面上均连接有一万向轮,在下三角框架旋转过程中起到支撑作用,还可设置通过电路信号远程手动控制的主动万向轮,带动上三角框架沿着直线导轨移动,使上、下三角框架中心重合。
本实施例中,上三角框架的连接体为Φ160mm的圆柱体,向外延伸的三个连接臂的长度为250mm,三个连接臂之间的夹角均为120°。
本实施例中,下三角框架的连接体为Φ160mm的圆柱体,向外延伸的三个连接臂的长度为500mm,三个连接臂之间的夹角均为120°。
本发明中具有六个连接臂,每个连接臂上连接有一组共三个海绵真空吸盘,本发明中共有六组吸盘,吸盘选用青岛威泰克国际贸易有限公司制造的VS系列海绵吸盘,型号为VS60 EF-18F BV-L1820 BJ18,每个吸盘的直径为6.75cm,可提供足够的吸力以维持机器人基本的运动状态,实现对墙体、地面的吸附。
本发明中气缸为ZZPC公司生产的QGB铝合金气缸,型号为QG BD 100X200 S,气缸伸缩距离可达226mm,从而实现海绵真空吸盘组地上升或者下降。
如图4,下三角框架的连接体底面可搭载摄像机固定台19,摄像机固定台上连接TP—Link摄像机18,摄像机固定台可内置高性能CMOS图像传感器和摄像机线路,TP—Link摄像机水平视角可以达到360°,数值视角可以达到163°,分辨率2304×1296,可以高清拍摄桥梁裂缝。
上三角框架和下三角框架通过车轮固定架、限位车轮直线导轨、导向块与导向块固定架连接在一起。开启上三角框架的气缸,带动伸缩杆伸出,将上三角框架的海绵真空吸盘吸附在地面或墙体上,将上三角框架固定;然后开启转动电机,转轴通过圆环式转盘带动下三角框架整体转动,转动一定角度后,开启下三角框架的气缸,使伸缩杆伸出,通过下三角框架的海绵真空吸盘吸附在地面或墙体上,将下三角框架固定;然后松开上三角框架的吸盘,开启上三角框架的气缸,带动伸缩杆缩回,开启每个限位车轮的移动电机,带动上三角框架在直线导轨上移动,直线导轨的两端均设置有限位装置,保证导向块在直线导轨上滑动时,不会脱离直线导轨,待上三角框架移动一定距离后,再次开启上三角框架的气缸,带动伸缩杆伸出,将上三角框架的海绵真空吸盘吸附在地面或墙体上,将上三角框架固定;然后开启转动电机,转轴通过圆环式转盘带动下三角框架整体转动,以此类推,实现桥梁裂缝探伤爬壁机器人的移动。
本装置的使用方法如下:
步骤一:将桥梁裂缝探伤爬壁机器人移到混凝土待探伤区域,使六组海绵真空吸盘组完全吸附在桥面上。
步骤二:调节摄像头水平、竖直旋转使得摄像头正对混凝土裂缝区域,拍照并且实时通过摄像机固定台内置高性能CMOS图像传感器将图片输送到PC端或者手机端控制程序。
步骤三:当裂缝距离摄像头位置大于500mm时,超出摄像头裂缝高清成像范围,并且超出圆环三条连接板面的长度,则需移动桥梁裂缝探伤爬壁机器人,使得摄像头再次正对裂缝位置。此时将上三角框架连接的三组海绵真空吸盘取消吸附,气缸上提海绵真空吸盘。
步骤四:转动电机运行,带动圆环式转盘旋转,使下三角框架和直线轨道一起旋转到机器人前进方向。同时导向块提高了桥梁裂缝探伤爬壁机器人的上三角框架在沿直线轨道运动的过程中的稳定性;并弥补了限位车轮在连接上、下三角框架作用中刚度不足的缺陷,提升了上三角框架和下三角框架的整体稳定性和完成下三角框架和直线轨道一起旋转到机器人前进方向的运动过程的可靠性。
步骤五:待下三角框架和直线轨道一起旋转到机器人前进方向时,限位车轮开始前进。限位车轮的移动电机可提供限位车轮前进的动力,从而实现限位车轮在直线导轨的运动。
步骤六:限位车轮移动至直线导轨尽头时,关闭移动电机。
步骤七:上三角框架连接的气缸伸缩杆伸出,使海绵真空吸盘组地下降,并使海绵真空吸盘组吸附在桥面上。同时下三角框架连接的三组真空吸盘组取消吸附桥面,真空吸盘组连接的气缸将海绵真空吸盘提升。
步骤八:通过电路信号远程手动控制主动万向轮,使下三角框架中心与上三角框架中心重合。
步骤九:重复步骤四至步骤八的工作直至摄像头对准混凝土裂缝处。
需要说明的是混凝土桥面探伤一般为近距离探伤,不需要过多的调节装置,当裂缝在不同的区域时可以通过人工或者机械运输将探伤机器人移动至其它探伤区域。
- 一种桥梁裂缝探伤爬壁机器人
- 一种多桥梁裂缝探测用探伤装置