一种用于AGV系统的自动换电装置
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及智能机器人技术领域,特别涉及一种用于AGV系统的自动换电装置。
背景技术
随着科学技术的发展,目前现有的AGV系统的机器人通常都能实现充电自动化,当AGV机器人的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方充电。
但是,现有的AGV机器人通常直接采用充电桩进行充电,直到电池充满,但是由于充电过程中,AGV机器人需要停止其他工作进行充电,充电时间长,容易造成AGV机器人闲置时间长,若需要充电的AGV机器人数量较多,容易影响正常工作;但是,AGV机器人通过更换电池的方式进行续航,也会在电池更换过程中造成AGV机器人出现断电的情况,AGV机器人一旦断电,则容易造成自动换电工作难以进行的情况。
为此,本申请提出一种用于AGV系统的自动换电装置,既可以实现AGV机器人电池的更换,又可以避免AGV机器人在换电池的过程中出现断电的情况,保证换电过程的正常进行。
发明内容
本发明的主要目的在于提供一种用于AGV系统的自动换电装置,可以有效解决背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:一种用于AGV系统的自动换电装置,包括换电区和位于换电区一侧的换电站,所述换电区包括机器人停放位和供机器人充电的充电桩,所述充电桩位于靠近机器人停放位处,所述换电站包括用于抓取电池的抓取装置、驱动抓取装置上下移动的驱动装置、以及用于对电池进行充电和存放的电池存储架,所述抓取装置安装在龙门架上,所述驱动装置安装在龙门架上,所述电池存储架沿横向移动装置的长度方向分布,所述横向移动装置垂直于龙门架,所述电池存储架上设置有若干电池仓储位,每个所述电池仓储位上均设置有充电接口,所述电池仓储位上对称设置有电池定位销。
优选的,所述龙门架的高度和宽度均大于电池存储架的高度和宽度,所述龙门架的可以跨过电池存储架。
优选的,所述驱动装置包括同步带轮A、驱动同步带轮A旋转的电机A、以及传动套装在同步带轮A上的同步带A,所述同步带A沿龙门架的竖直方向布置。
优选的,所述抓取装置靠近龙门架的一端设置有固定板A,所述固定板A固定在同步带A上。
优选的,所述抓取装置靠近龙门架的一端设置有滑轮A,所述滑轮A滑动套装在导轨A上,所述导轨A竖直固定在龙门架的两端内侧。
优选的,所述同步带A位于龙门架的两端,且同步带A与导轨A的位置相互错开分布。
优选的,所述横向移动装置包括同步带轮B、驱动同步带轮B旋转的电机B、以及传动套装在同步带轮B上的同步带B,所述同步带B沿垂直于龙门架的方向布置。
优选的,所述龙门架的底部设置有固定板B,所述固定板B固定在同步带B上。
优选的,所述龙门架的底部还设置有滑轮B,所述滑轮B滑动套装在导轨B上,所述导轨B水平固定在底座上,所述导轨B垂直于龙门架。
优选的,所述同步带B位于底座上,且同步带B与导轨B的位置相互错开分布。
与现有技术相比,本发明具有如下有益效果:该种用于AGV系统的自动换电装置,通过在电池仓储位上配备了相应的充电接口,以及电池定位销以实现电池对位准确,进而保证电池的正常充电;
通过充电桩和换电站的设置,当AGV机器人需要换电时停靠在换电区,并通过充电桩对AGV机器人进行供电,然后换电站抓取装置将AGV机器人上的电池取下,放置在相应的电池仓储位开始对电池充电,并将充满电的电池放到机器人上,此时电池开始供电,充电桩断电,换电完毕;采用这样的方式,既可以实现AGV机器人电池的更换,又可以避免AGV机器人在换电池的过程中出现断电的情况,保证换电过程的正常进行。
附图说明
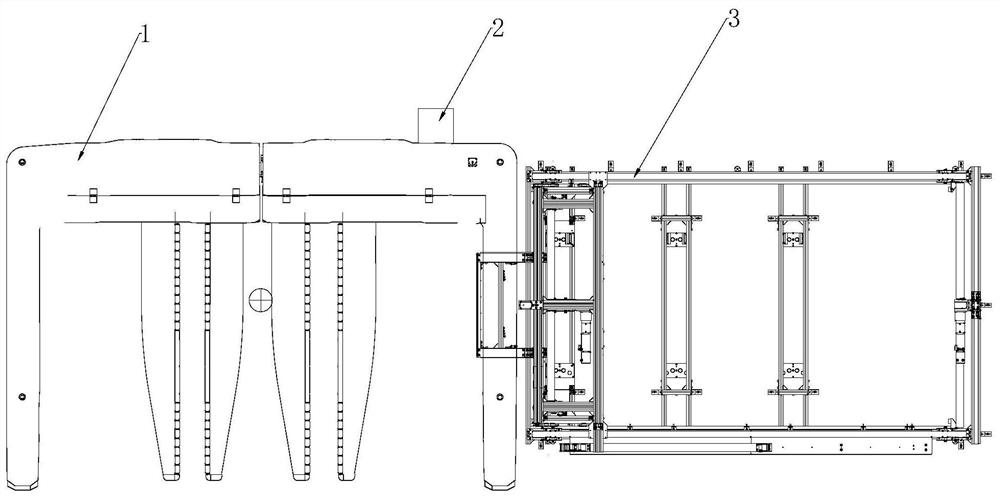
图1为本发明所述一种用于AGV系统的自动换电装置整体俯视图;
图2为本发明所述一种用于AGV系统的自动换电装置的换电站侧视图;
图3为本发明所述一种用于AGV系统的自动换电装置的电池仓储位示意图;
图4为本发明所述一种用于AGV系统的自动换电装置的换电站俯视图;
图5为图4的A处放大示意图。
图中:1、机器人停放位;2、充电桩;3、换电站;4、龙门架;5、抓取装置;6、驱动装置;7、电池仓储位;8、横向移动装置;9、底座;10、电池存储架;11、充电接口;12、电池定位销;13、同步带A;14、固定板A;15、滑轮A;16、导轨A;17、滑轮B;18、固定板B;19、同步带B;20、导轨B。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
参照图1-5,一种用于AGV系统的自动换电装置,包括换电区和位于换电区一侧的换电站3,所述换电区包括机器人停放位1和供机器人充电的充电桩2,所述充电桩2位于靠近机器人停放位1处,所述换电站3包括用于抓取电池的抓取装置5、驱动抓取装置5上下移动的驱动装置6、以及用于对电池进行充电和存放的电池存储架10,抓取装置5可以采用但不限于托板,用于托起电池,所述抓取装置5安装在龙门架4上,所述驱动装置6安装在龙门架4上,所述电池存储架10沿横向移动装置8的长度方向分布,所述横向移动装置8垂直于龙门架4,所述电池存储架10上设置有若干电池仓储位7,每个所述电池仓储位7上均设置有充电接口11,所述电池仓储位7上对称设置有电池定位销12。
通过采用上述技术方案,通过在电池仓储位7上配备了相应的充电接口11,以及电池定位销12以实现电池对位准确,进而保证电池的正常充电。
通过充电桩2和换电站3的设置,当AGV机器人需要换电时停靠在换电区,并通过充电桩2对AGV机器人进行供电,然后换电站3抓取装置5将AGV机器人上的电池取下,放置在相应的电池仓储位7开始对电池充电,并将充满电的电池放到机器人上,此时电池开始供电,充电桩2断电,换电完毕;采用这样的方式,既可以实现AGV机器人电池的更换,又可以避免AGV机器人在换电池的过程中出现断电的情况,保证换电过程的正常进行。
参照图1、图2、图4,所述龙门架4的高度和宽度均大于电池存储架10的高度和宽度,所述龙门架4的可以跨过电池存储架10。
通过采用上述技术方案,龙门架4可以跨过电池存储架10,方便龙门架4跨过前排的电池存储架10,取下后排位置的电池存储架10上的电池;同时又能够保证龙门架4上的抓取装置5可以抓取到电池存储架10上最高位置的电池。
参照图2,所述驱动装置6包括同步带轮A、驱动同步带轮A旋转的电机A、以及传动套装在同步带轮A上的同步带A13,所述同步带A13沿龙门架4的竖直方向布置。
参照图2,所述抓取装置5靠近龙门架4的一端设置有固定板A14,所述固定板A14固定在同步带A13上,固定板A14与同步带A13之间可以通过螺栓进行连接。
参照图2,所述抓取装置5靠近龙门架4的一端设置有滑轮A15,滑轮A15对称布置在抓取装置5靠近龙门架4的竖直架体上,所述滑轮A15滑动套装在导轨A16上,所述导轨A16竖直固定在龙门架4的两端内侧。
参照图2,所述同步带A13位于龙门架4的两端,且同步带A13与导轨A16的位置相互错开分布。
通过采用上述技术方案,在抓取装置5上下移动时,电机A驱动同步带轮A旋转,进而带动同步带A13传动,同步带A13传动带动固定板A14上下移动,固定板A14带动抓取装置5上下移动,在抓取装置5上下移动过程中,抓取装置5上的滑轮A15沿着导轨A16移动,对抓取装置5的移动起到导向作用。
参照图2,所述横向移动装置8包括同步带轮B、驱动同步带轮B旋转的电机B、以及传动套装在同步带轮B上的同步带B19,所述同步带B19沿垂直于龙门架4的方向布置。
参照图2,所述龙门架4的底部设置有固定板B18,所述固定板B18固定在同步带B19上,固定板B18与同步带B19之间可以通过螺栓进行连接。
参照图2,所述龙门架4的底部还设置有滑轮B17,所述滑轮B17滑动套装在导轨B20上,所述导轨B20水平固定在底座9上,所述导轨B20垂直于龙门架4。
参照图2,所述同步带B19位于底座9上,且同步带B19与导轨B20的位置相互错开分布。
通过采用上述技术方案,在龙门架4左右移动时,电机B驱动同步带轮B旋转,进而带动同步带B19传动,同步带B19传动带动固定板B18左右移动,固定板B18带动龙门架4左右移动,在龙门架4左右移动过程中,龙门架4上的滑轮B17沿着导轨B20移动,对龙门架4的移动起到导向作用。
需要说明的是,本发明为一种用于AGV系统的自动换电装置,在使用时,当AGV机器人需要换电时,停靠在旁边换电区,与充电桩2接触后,为了避免机器人断电,这时充电桩2会开始为AGV机器人供电,然后换电站3抓取装置5对位至AGV机器人的电池下方,将AGV机器人上的电池取下,然后通过驱动装置6放置在相应的电池仓储位7,并开始对电池充电,随后横向移动装置8带动抓取装置5移动到充满电的电池仓储位7,将电池取下,放到AGV机器人上,抓取装置5退出,此时AGV机器人电池开始供电,充电桩2断电,换电完毕。
最后应说明的是:显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围之中。
- 一种用于AGV系统的自动换电装置
- 一种用于电芯卷绕的自动换带装置以及电芯卷绕设备