一种基于神经网络的机械臂内模控制方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及机械臂系统控制领域,具体为一种基于神经网络的机械臂内模控制方法。
背景技术
随着科学技术的发展,机械臂系统由于其优异的性能,在工业及其自动化领域得到了广泛的应用。同时,作为机械臂的关节驱动电机,永磁同步电机由于其具有功率密度高、体积小、易于维护等特点,在驱动机械臂时性能更加优异。考虑到永磁同步电机及机械臂整个系统是一个十分复杂的非线性系统,且存在参数不确定性和外部干扰,如何设计控制器实现机械臂的高精度控制具有重要的研究意义。
一方面,非线性输出调节理论在过去的几十年取得了很大进展,而其内模控制方法能够方便的解决系统的轨迹跟踪与干扰抑制问题,且具有良好的鲁棒性。另一方面,由于神经网络能够近似复杂的非线性函数,在非线性系统控制方面也应用颇广。在针对永磁同步电机驱动的机械臂系统中,将内模控制方法与神经网络方法相结合,可以在系统参数未知的情况下实现位置跟踪和干扰抑制,且具有更加优良的跟踪性能。
发明内容
基于背景技术存在的技术问题,本发明提出了一种基于神经网络的机械臂内模控制方法。针对永磁同步电机驱动的机械臂系统,设计了基于内模和神经网络的状态反馈控制器,从而得到优良的位置跟踪与干扰抑制性能,并允许系统所有参数未知。
本发明的技术方案是:
一种基于神经网络的机械臂内模控制方法,其特征在于,包括以下步骤:
步骤1:选取永磁同步电机作为关节驱动电机,并将电机模型与机械臂整合,建立整体系统的数学模型;
步骤2:针对机械子系统,设计基于输出调节理论的内模控制器;
步骤3:针对电气子系统,利用神经网络方法设计最终控制器。
步骤1中,选取永磁同步电机作为关节驱动电机,并将电机模型与机械臂整合,建立整体系统的数学模型,其过程如下:
1.1,根据欧拉-拉格朗日方法建立机械臂的动力学模型,由表贴式永磁同步电机驱动的n自由度机械臂模型如下:
其中
1.2,令
上述机械臂系统具有以下性质:
性质1:H
其中m
性质2:矩阵
性质3:机械臂模型相对于一组物理参数是线性的:
其中
1.3,假设机械臂关节的位置参考信号为q
其中a
1.4,定义e=q-q
1.5,结合性质3,系统(2)可以写为如下形式:
步骤2中,针对机械子系统,设计基于输出调节理论的内模控制器,其过程如下:
2.1,对τ
其中
2.2,令υ
其中
2.3,选择一对可控矩阵(M
2.4,定义如下记号:
根据公式(10),可得:
2.5,设计内模为如下形式:
2.6,进行如下坐标变换:
根据性质3,得到如下误差方程:
其中
2.7,设计如下动态补偿器:
2.8,令
则机械子系统方程可以写为如下形式:
其中
2.9,设计机械子系统的状态反馈控制律为如下形式:
其中
2.10,令
2.11,选择自适应律为
2.12,得到的内模控制器为如下形式:
步骤3中,针对电气子系统,利用神经网络方法设计最终控制器,其过程如下:
3.1,定义如下记号:
其中
3.2,令
3.3,利用径向基神经网络(RBFNN)近似未知连续函数,则f
其中
3.4,设计状态反馈控制律为如下形式:
其中对于i=1,2,
3.5,令
3.6,设计
其中λ
3.7,令
其中a
3.8,选择设计参数使得κ-b
其中
3.9,进行稳定性分析,根据公式(31)得出以下结果:
则s,
3.10,得到的最终控制器如下形式:
本发明的优点是:
本发明提出的一种基于神经网络的机械臂内模控制方法,针对永磁同步驱动的机械臂系统中存在系统参数不确定和外界干扰,设计了基于内模和神经网络的状态反馈控制器,实现了机械臂的位置跟踪控制与干扰抑制,具有良好的位置跟踪性能,并且允许系统所有参数未知。
附图说明
图1为二自由度机械臂示意图;
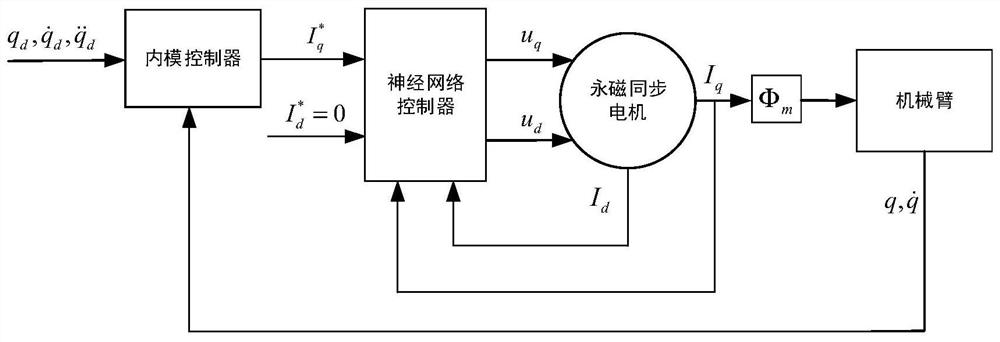
图2为整体系统控制框图;
图3为机械臂关节角位置跟踪曲线;
图4为机械臂关节角位置跟踪误差曲线;
图5为电机d轴电流曲线;
图6为电机q轴电流曲线;
图7为电机d轴电压曲线;
图8为电机q轴电压曲线。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本实施例具体以二自由度机械臂(如图1所示)实施,其中q
结合图1和图2说明本实施方式,本实施方式所述的一种基于神经网络的机械臂内模控制方法,具体步骤如下:
步骤1,选取永磁同步电机作为关节驱动电机,并将电机模型与机械臂整合,建立整体系统的数学模型,其过程如下:
1.1,根据欧拉-拉格朗日方法建立机械臂的动力学模型,由表贴式永磁同步电机驱动的n自由度机械臂模型如下:
其中
1.2,令
上述机械臂系统具有以下性质:
性质1:H
其中m
性质2:矩阵
性质3:机械臂模型相对于一组物理参数是线性的:
其中
1.3,假设机械臂关节的位置参考信号为q
其中a
1.4,定义e=q-q
1.5,结合性质3,系统(2)可以写为如下形式:
步骤2,针对机械子系统,设计基于输出调节理论的内模控制器,其过程如下:
2.1,对τ
其中
2.2,令
其中
2.3,选择一对可控矩阵(M
2.4,定义如下记号:
根据公式(10),可得:
2.5,设计内模为如下形式:
2.6,进行如下坐标变换:
根据性质3,得到如下误差方程:
其中
2.7,设计如下动态补偿器:
2.8,令
则机械子系统方程可以写为如下形式:
其中
2.9,设计机械子系统的状态反馈控制律为如下形式:
其中
2.10,令
2.11,选择自适应律为
2.12,得到的内模控制器为如下形式:
步骤3,针对电气子系统,利用神经网络方法设计最终控制器,其过程如下:
3.1,定义如下记号:
其中
3.2,令
3.3,利用径向基神经网络(RBFNN)近似未知连续函数,则f
其中
3.4,设计状态反馈控制律为如下形式:
其中对于i=1,2,
3.5,令
3.6,设计
其中λ
3.7,令
其中a
3.8,选择设计参数使得κ-b
其中
3.9,进行稳定性分析,根据公式(31)得出以下结果:
则s,
3.10,得到的最终控制器如下形式:
本实施例中机械臂的模型以及参数如下:
h
h
两个关节均采用相同的永磁同步电机,参数为:电机极对数p=8,电阻R
控制器参数选择如下:
α=100,k
λ
l
神经网络的结点数m为11,节点中心v
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以同等替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于神经网络的机械臂内模控制方法
- 基于神经网络逆系统的五相容错永磁电机内模控制方法