一种升降桌及升降桌的控制方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明实施例涉及自动控制技术领域,尤其涉及一种升降桌及升降桌的控制方法。
背景技术
目前,很多学生和工作人员,大部分时间坐在桌前进行学习和办公,但是长时间的坐在座位上办公,导致了很多人身体亚健康。
因此,亟需一种可以调整桌面高度的升降桌。但是目前的升降桌只能通过人力改变升降桌的高度,升降桌的自动控制程度不高,影响了用户体验。
发明内容
本发明提供一种升降桌及升降桌的控制方法,以实现一种自动改变桌面高度的升降桌。
第一方面,本发明实施例提供了一种升降桌,该升降桌包括:控制模块和桌面高度改变机构,所述控制模块包括控制单元和至少一个检测单元,所述桌面高度改变机构的控制端与所述控制单元的第一信号输出端电连接;
所述检测单元用于检测用户的姿态信息,其中,所述用户的姿态信息包括坐姿或者站姿;
所述用户保持一种姿态的时间大于或等于预设时间时,所述控制单元用于控制所述桌面高度改变机构改变所述升降桌的桌面高度,所述控制单元的第一信号输入端与所述检测单元的信号输出端电连接。
可选地,所述检测单元包括控制子单元和至少一个距离传感器;
所述距离传感器用于检测所述用户距离所述升降桌的桌面的垂直距离;
所述控制子单元用于根据所述升降桌的桌面距离地面的高度信息和所述用户距离所述升降桌的桌面的垂直距离,确定所述用户的姿态信息,所述控制子单元的信号输入端与所述距离传感器的信号输出端电连接,所述控制子单元的通信端与所述控制单元的通信端通信连接,所述控制子单元的数量为至少两个时,所述检测单元还包括至少一个开关单元,不同所述控制子单元之间通过开关单元实现电连接。
可选地,所述控制模块还包括显示单元和输入单元;
所述显示单元的信号输入端与所述控制单元的第二信号输出端连接,所述用户保持一种姿态的时间大于或等于预设时间时,所述显示单元用于显示桌面高度选择信号;
所述输入单元用于获取用户的桌面高度确认信号,所述输入单元的信号输出端与所述控制单元的第二信号输入端电连接;
所述控制单元用于根据所述用户的桌面高度确认信号,控制所述桌面高度改变机构改变所述升降桌的桌面高度。
可选地,所述控制模块还包括报警单元,所述报警单元用于所述用户保持一种姿态的时间大于或等于预设时间时,发出桌面高度改变提醒信号。
第二方面,本发明实施例还提供了一种升降桌的控制方法,该升降桌的控制方法包括:
检测单元检测用户的姿态信息,其中,所述用户的姿态信息包括坐姿或者站姿;
所述用户保持一种姿态的时间大于或等于预设时间时,控制单元根据所述用户的姿态信息控制桌面高度改变机构改变所述升降桌的桌面高度。
可选地,检测单元检测用户的姿态信息包括:
距离传感器检测所述用户距离所述升降桌的桌面的垂直距离;
控制子单元根据所述升降桌的桌面距离地面的高度信息和所述用户距离所述升降桌的桌面的垂直距离,确定所述用户的姿态信息。
可选地,控制子单元根据所述升降桌的桌面距离地面的高度信息和所述用户距离所述升降桌的桌面的垂直距离,确定所述用户的姿态信息包括:
所述升降桌的桌面距离地面的高度信息为第一高度,且所述用户距离所述升降桌的桌面的垂直距离小于等于预设值时,所述控制子单元确定所述用户的姿态为坐姿;
所述升降桌的桌面距离地面的高度信息为第二高度,且所述用户距离所述升降桌的桌面的垂直距离小于等于预设值时,所述控制子单元确定所述用户的姿态为站姿,其中,所述第二高度大于所述第一高度。
可选地,所述用户保持一种姿态的时间大于或等于预设时间时,控制单元根据所述用户的姿态信息控制桌面高度改变机构改变升降桌的桌面高度包括:
所述用户保持一种姿态的时间大于或等于预设时间时,显示单元显示桌面高度选择信号;
输入单元获取所述用户的桌面高度确认信号;
所述控制单元根据所述用户的桌面高度确认信号,控制所述桌面高度改变机构改变所述升降桌的桌面高度。
可选地,所述控制单元根据所述用户的桌面高度确认信号,控制所述桌面高度改变机构改变所述升降桌的桌面高度包括:
所述用户的桌面确认信号和预设确认信号匹配,所述控制单元根据所述用户的姿态信息控制桌面高度改变机构改变所述升降桌的桌面高度;
所述控制单元将所述用户保持一种姿态的时间清零处理;
或者,所述用户的桌面高度确认信号和预设确认信号不匹配,所述控制单元将所述用户保持一种姿态的时间清零处理。
可选地,所述用户保持一种姿态的时间大于或等于预设时间时,显示单元显示桌面高度选择信号时还包括:
报警单元发出桌面高度改变提醒信号。
本发明通过检测单元检测用户的姿态,控制单元接收到用户的姿态信息时,开始计时,如果用户保持一种姿态的时间大于或等于预设时间时,控制单元控制桌面高度改变机构改变升降桌的桌面高度,使得用户改变姿态,避免用户保持站姿或者坐姿时间过长,损坏身体,进而有助于保护用户保持健康的身体状态,并且实现了升降桌对于用户的姿态的自动检测过程以及根据用户姿态自动调整桌面高度,进而提高了升降桌的自动控制程度,避免通过人力来改变桌面高度的问题,提升了用户体验。
附图说明
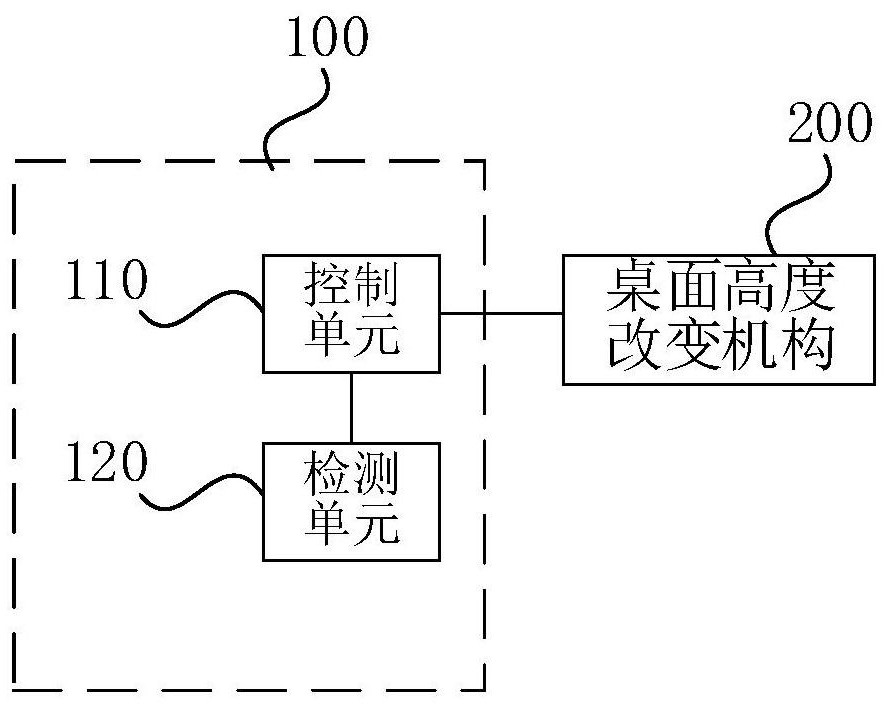
图1是本发明实施例一提供的一种升降桌的电路结构示意图;
图2是本发明实施例一提供的一种升降桌的结构示意图;
图3是本发明实施例二提供的一种升降桌的电路结构示意图;
图4是本发明实施例二提供的一种检测单元的电路结构示意图;
图5是本发明实施例三提供的一种升降桌的控制方法的流程图;
图6是本发明实施例四提供的一种升降桌的控制方法的流程图;
图7是本发明实施例四提供的一种确定用户的姿态信息的控制方法的流程图;
图8是本发明实施例四提供的一种根据用户姿态改变桌面高度的控制方法的流程图;
图9是本发明实施例五提供的一种升降桌的控制方法的流程图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
实施例一
图1为本发明实施例一提供的一种升降桌的电路结构示意图,参见图1,升降桌包括:控制模块100和桌面高度改变机构200,控制模块100包括控制单元110和至少一个检测单元120,桌面高度改变机构200的控制端与控制单元110的第一信号输出端电连接;检测单元120用于检测用户的姿态信息,其中,用户的姿态信息包括坐姿或者站姿;用户保持一种姿态的时间大于或等于预设时间时,控制单元110用于控制桌面高度改变机构200改变升降桌的桌面高度,控制单元110的第一信号输入端与检测单元120的信号输出端电连接。
图2是本发明实施例一提供的一种升降桌的结构示意图,参见图2,升降桌位于地面10上,桌面高度改变机构200设置与升降桌的桌腿20上,桌面高度改变机构200可以调节桌腿20的高度,从而调节升降桌的桌面30的高度,控制模块100设置于升降桌的桌面30上。
具体的,检测单元120可以检测升降桌前是否有人,并将检测的信号发送至控制单元110,当检测单元120检测到升降桌有人,结合升降桌的高度,可以判断出用户的姿态,当升降桌的高度为第一高度时,用户为坐姿,当升降桌的高度为第二高度时,用户为站姿,第一高度例如为80厘米,第二高度例如为115厘米,具体的高度数据可以根据实际情况确定,这里并不进行限定。当控制单元110接收到用户的姿态信息时,开始计时,如果用户保持一种姿态的时间大于或等于预设时间时,控制单元110控制桌面高度改变机构200改变升降桌的桌面高度。预设时间可以根据具体情况设定,这里并不进行限定。例如,当桌面高度为第一高度,且升降桌前有人时,表明用户处于坐姿状态,控制单元110开始计时,当用户保持坐姿60分钟时,控制单元110就会控制桌面高度改变机构200将桌面升高至第二高度,使得用户改变姿态,以保护使用者健康。例如,当桌面高度为第二高度,且升降桌前有人时,表明用户处于站姿状态,控制单元110开始计时,当用户保持站姿30分钟时,控制单元110就会控制桌面高度改变机构200将桌面降低至第一高度,使得用户改变姿态,以保护使用者健康。
需要说明的是,图1中只示出了升降桌包括一个检测单元120的情况,但并不对检测单元120的数量进行限定,例如也可以是设置三个检测单元120,通过设置三个检测单元120可以保证检测到用户,在用户位于升降桌正前方、左前方和右前方时,都可以检测到,提高了检测的准确度。
示例性的,桌面高度改变机构200可以包括电机和直线模组,其中直线模组用于支撑桌面30,电机在控制单元110的控制下,控制直线模组的伸长或者缩短,直线模组带动桌面30作直线运动,进而改变桌面30的高度。
本实施例的技术方案,通过检测单元120检测用户的姿态,如果用户保持一种姿态的时间大于或等于预设时间时,控制单元110控制桌面高度改变机构200改变升降桌的桌面30的高度,使得用户改变姿态,避免用户保持站姿或者坐姿时间过长,损坏身体,进而有助于保护用户保持健康的身体状态,并且实现了升降桌对于用户的姿态的自动检测过程以及根据用户姿态自动调整桌面高度,进而提高了升降桌的自动控制程度,避免通过人力来改变桌面高度的问题,提升了用户体验。
实施例二
图3为本发明实施例二提供的一种升降桌的结构示意图,图4是本发明实施例二提供的一种检测单元的电路结构示意图,可选地,参见图2、图3和图4,检测单元120包括控制子单元121和至少一个距离传感器122;距离传感器122用于检测用户距离升降桌的桌面30的垂直距离;控制子单元121用于根据升降桌的桌面30距离地面10的高度信息和用户距离升降桌的桌面30的垂直距离,确定用户的姿态信息,控制子单元121的信号输入端与距离传感器122的信号输出端电连接,控制子单元121的通信端与控制单元110的通信端通信连接,控制子单元121的数量为至少两个时,检测单元120还包括至少一个开关单元123,不同控制子单元121之间通过开关单元123实现电连接。
检测单元120确定用户的姿态信息,并将用户的姿态信息发送给控制单元110的原理如下:
具体的,距离传感器122可以检测到用户距离升降桌的桌面30的垂直距离,距离传感器122例如可以是VL53L0传感器,可以检测到用户与距离传感器之间的垂直距离,在距离传感器122和升降桌的桌面30的距离可知的基础上,从而检测到用户距离升降桌的桌面30的垂直距离,距离传感器122也可以是其他型号的传感器,这里并不进行限定。图3和图4中只示出了检测单元120包括一个距离传感器122的情况,但并不进行限定。距离传感器122将检测的距离信息发送至控制子单元121,控制子单元121将用户距离与预设距离进行比较,当用户距离升降桌的桌面30的垂直距离小于或等于预设距离时,表明升降桌前有人,预设距离可以根据实际情况确定,这里并不进行限定。可选地,距离传感器122实时检测用户距离升降桌的桌面30的垂直距离,控制子单元121实时进行用户距离与预设距离的比较,当多次判断出用户距离升降桌的桌面30的垂直距离小于或等于预设距离时,才确定升降桌前有人,多次可以是至少两次。也可以是控制子单元121实时进行用户距离与预设距离的比较,如果一段时间内,都判断出用户距离升降桌的桌面30的垂直距离小于或等于预设距离,则确定升降桌前有人,一段时间例如可以是20秒,也可以是其他时间,这里并不进行限定。从而可以避免控制子单元121误判,避免有人经过升降桌或座椅晃动引起的误判。当确定升降桌前有人时,控制子单元121根据升降桌的桌面30距离地面10的高度信息和用户距离升降桌的桌面30的垂直距离,确定用户的姿态信息,并将用户的姿态信息发送至控制单元110,使得控制单元110可以对用户保持一种姿态的时间进行计时。控制子单元121例如可以通过控制器局域网络(Controller Area Network,CAN)总线的方式与控制单元110进行通信,将用户姿态发送给控制单元110。
可选地,参加图4,控制子单元121可以包括通信单元124,通信单元124例如可以是TJA1050芯片,以实现与控制单元110进行CAN通信。控制子单元121还包括BL1551芯片125和电阻R1,当控制子单元121需要与控制单元110进行通信时,控制子单元121控制BL1551芯片125导通,使得电阻R1与通信单元124连接,使得TJA1050芯片可以工作,以实现与控制单元110进行CAN通信。
可选地,参加图4,控制子单元121可以包括电源转换模块126和保险丝127,电源转换模块126通过保险丝127与电源40电连接,保险丝127可以防止输入电压过大导致控制子单元121损坏,同时保证自身发生短路故障时不会导致设备发生故障。电源转换模块126可以将电源40的电压转换为控制子单元121的工作电压,使得控制子单元121可以正常工作,电源转换模块126例如是由AMS1117芯片实现,也可以由其他型号的芯片或其他电路实现,这里并不进行限定。电源转换模块126也可以为其他器件提供工作电压。
此外,当升降桌上设置有至少两个检测单元120时,就有至少两个控制子单元121,不同控制子单元121之间通过开关单元123实现电连接,当第m个控制子单元121完成初始化后,导通开关单元123,第m+1个控制子单元121就会开始初始化,直至所有需要使用的控制子单元121完成初始化。开关单元123例如可以是三极管,则三极管的基极与第m个控制子单元121电连接,三极管的集电极与第m+1个控制子单元121电连接,三极管的发射极可以接地。其中,m为大于1的正整数。另外,距离传感器122不仅可以检测用户距离升降桌的桌面30的垂直距离,还可以检测用户呼吸时腹腔的运动、人体的前后移动等,方便对人体的健康状况进行检测。
可选地,参见图3,控制模块100还包括显示单元130和输入单元140;显示单元130的信号输入端与控制单元110的第二信号输出端连接,用户保持一种姿态的时间大于或等于预设时间时,显示单元130用于显示桌面高度选择信号;输入单元140用于获取用户的桌面30高度确认信号,输入单元140的信号输出端与控制单元110的第二信号输入端电连接;控制单元110用于根据用户的桌面高度确认信号,控制桌面高度改变机构200改变升降桌的桌面高度。
具体的,当控制单元110接收到检测单元120发送的升降桌前有人的信息和用户的姿态信息时,开始计时,当控制单元110判断出用户保持一种姿态信息的时间大于或等于预设时间时,控制单元110发送信号至显示单元130,使得显示单元130显示桌面高度选择信号,当升降桌的桌面30的高度为第一高度,即用户为坐姿时,显示单元130会显示是否将桌面30切换到第二高度的选择信号;当升降桌的桌面30的高度为第二高度,即用户为站姿时,显示单元130会显示是否将桌面30切换到第一高度的选择信号。例如当用户保持坐姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经坐了很久了,站一会更有利于健康哦,是否同意”。当用户看到显示单元130显示的信息时,用户可以通过输入单元140输入桌面30的高度确认信号,如果用户同意显示单元130显示的信息,输入单元140将确认信息发送至控制单元110,控制单元110就会控制桌面高度改变机构200按照显示单元130显示的信息改变升降桌的桌面高度。如果用户不同意显示单元130显示的信息,则桌面高度改变机构200不会调整桌面高度,或者用户通过输入单元140输入高度值,控制单元110控制桌面高度改变机构200按照用户输入的高度改变升降桌的桌面高度。例如用户保持坐姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经坐了很久了,站一会更有利于健康哦,是否同意”,用户通过输入单元140输入“同意”的确认信息,控制单元110接收到确认信息后,控制单元110就会控制桌面高度改变机构200将桌面高度升高。或者,例如用户保持站姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经站了很久了,坐一会更有利于健康哦,是否同意”,用户通过输入单元140输入“同意”的确认信息,控制单元110接收到确认信息后,控制单元110就会控制桌面高度改变机构200将桌面高度降低。从而避免用户长时间保持一种姿态,保护用户健康。
如果用户通过输入单元140输入“不同意”,拒绝显示单元130显示的建议信息,则控制单元110重新开始计时。如果用户通过输入单元140输入“同意”的确认信息,控制单元121控制桌面高度改变机构200将桌面高度改变后,控制单元110重新开始计时。
其中,输入单元140例如可以是触控屏,也可以是语音采集器,也可以是键盘、鼠标等其他输入装置,这里并不进行限定。
可选地,参见图3,控制模块100还包括报警单元150,报警单元150用于用户保持一种姿态的时间大于或等于预设时间时,发出桌面高度改变提醒信号。
具体的,当控制单元110接收到检测单元120发送的升降桌前有人的信息和用户的姿态信息时,开始计时,当控制单元110判断出用户保持一种姿态信息的时间大于或等于预设时间时,控制单元110发送信号至报警单元150,报警单元150就会发出建议改变桌面30的高度的提醒信号,当用户通过输入单元140输入确认信息后,控制单元110就会根据报警单元150的提醒信号控制桌面高度改变机构200改变桌面30的高度,从而对用户久坐或久站进行提醒,避免用户长时间保持一种姿态,保护用户健康。
在上述实施例的基础上,本实施例的技术方案,通过利用距离传感器122检测用户距离升降桌的桌面的垂直距离,并将检测的距离信息发送至控制子单元121,控制子单元121将用户距离与预设距离进行比较,当用户距离升降桌的桌面的垂直距离小于或等于预设距离时,表明升降桌前有人,然后控制子单元121根据升降桌的桌面30距离地面10的高度信息,确定用户的姿态信息,并将用户的姿态信息发送至控制单元110,使得控制单元110可以对用户保持一种姿态的时间进行计时。当控制单元110判断出用户保持一种姿态信息的时间大于或等于预设时间时,控制单元110发送信号至显示单元130,使得显示单元130显示桌面30的高度选择信号,用户可以通过输入单元140输入桌面高度确认信号,如果用户确认显示单元130显示的信息,输入单元140将确认信息发送至控制单元110,控制单元110就会控制桌面高度改变机构200按照显示单元130显示的信息改变升降桌的桌面30的高度。控制单元110也可以发送信号至报警单元150,报警单元150就会发出建议改变桌面30的高度的提醒信号,当用户通过输入单元140输入确认信息后,控制单元110就会根据报警单元150的提醒信号控制桌面高度改变机构200改变桌面高度,从而对用户久坐或久站进行提醒,避免用户长时间保持一种姿态,保护用户健康。
实施例三
图5是本发明实施例三提供的一种升降桌的控制方法的流程图,参见图5,升降桌的控制方法包括:
S510、检测单元检测用户的姿态信息,其中,用户的姿态信息包括坐姿或者站姿。
具体的,检测单元120可以检测升降桌前是否有人,当检测单元120检测到升降桌有人,结合升降桌的高度,可以判断出用户的姿态,判断出用户为坐姿还是站姿。
S520、用户保持一种姿态的时间大于或等于预设时间时,控制单元根据用户的姿态信息控制桌面高度改变机构改变升降桌的桌面高度。
具体的,检测单元120将检测的信号发送至控制单元110,当控制单元110接收到用户的姿态信息时,开始计时,如果用户保持一种姿态的时间大于或等于预设时间时,控制单元110控制桌面高度改变机构200改变升降桌的桌面高度。预设时间可以根据具体情况设定,这里并不进行限定。
本实施例的技术方案,通过检测单元120检测用户的姿态,控制单元110接收到用户的姿态信息时,开始计时,如果用户保持一种姿态的时间大于或等于预设时间时,控制单元110控制桌面高度改变机构200改变升降桌的桌面高度,使得用户改变姿态,避免用户保持站姿或者坐姿时间过长,损坏身体,进而有助于保护用户保持健康的身体状态,并且实现了升降桌对于用户的姿态的自动检测过程以及根据用户姿态自动调整桌面高度,进而提高了升降桌的自动控制程度,避免通过人力来改变桌面高度的问题,提升了用户体验。
实施例四
图6是本发明实施例四提供的一种升降桌的控制方法的流程图,可选地,参见图6,升降桌的控制方法包括:
S610、距离传感器检测用户距离升降桌的桌面的垂直距离。
具体的,距离传感器122可以检测到用户距离升降桌的桌面的垂直距离,距离传感器122例如可以是VL53L0传感器,可以检测到用户与距离传感器之间的垂直距离,从而检测到用户距离升降桌的桌面的垂直距离,距离传感器122也可以是其他型号的传感器,这里并不进行限定。
S620、控制子单元根据升降桌的桌面距离地面的高度信息和用户距离升降桌的桌面的垂直距离,确定用户的姿态信息。
具体的,距离传感器122将检测的距离信息发送至控制子单元121,控制子单元121将用户距离与预设距离进行比较,当用户距离升降桌的桌面的垂直距离小于或等于预设距离时,表明升降桌前有人,预设距离可以根据实际情况确定,这里并不进行限定。当确定升降桌前有人时,控制子单元121根据升降桌的桌面距离地面的高度信息和用户距离升降桌的桌面的垂直距离,确定用户的姿态信息,判断出用户为坐姿还是站姿。
图7是本发明实施例四提供的一种确定用户的姿态信息的控制方法的流程图,可选地,参见图7,S620、控制子单元根据升降桌的桌面距离地面的高度信息和用户距离升降桌的桌面的垂直距离,确定用户的姿态信息,包括:
S621、升降桌的桌面距离地面的高度信息为第一高度,且用户距离升降桌的桌面的垂直距离小于等于预设值时,控制子单元确定用户的姿态为坐姿。
具体的,当用户距离升降桌的桌面的垂直距离小于等于预设值时,控制子单元121确定升降桌前有人。当桌面高度为第一高度,且升降桌前有人时,控制子单元121确定用户处于坐姿状态。其中,第一高度例如为80厘米,具体的高度数据可以根据实际情况确定,这里并不进行限定。
S622、升降桌的桌面距离地面的高度信息为第二高度,且用户距离升降桌的桌面的垂直距离小于等于预设值时,控制子单元确定用户的姿态为站姿,其中,第二高度大于第一高度。
具体的,当用户距离升降桌的桌面的垂直距离小于等于预设值时,控制子单元121确定升降桌前有人。当桌面高度为第二高度,且升降桌前有人时,控制子单元121确定用户处于站姿状态。其中,第二高度例如为115厘米,具体的高度数据可以根据实际情况确定,这里并不进行限定。
S630、用户保持一种姿态的时间大于或等于预设时间时,控制单元根据用户的姿态信息控制桌面高度改变机构改变升降桌的桌面高度。
图8是本发明实施例四提供的一种根据用户姿态改变桌面高度的控制方法的流程图,可选地,参见图8,S630、用户保持一种姿态的时间大于或等于预设时间时,控制单元根据用户的姿态信息控制桌面高度改变机构改变升降桌的桌面高度,包括:
S631、用户保持一种姿态的时间大于或等于预设时间时,显示单元显示桌面高度选择信号。
具体的,当控制单元110接收到检测单元120发送的升降桌前有人的信息和用户的姿态信息时,开始计时,当控制单元110判断出用户保持一种姿态信息的时间大于或等于预设时间时,控制单元110发送信号至显示单元130,使得显示单元130显示桌面高度选择信号,当升降桌的桌面高度为第一高度,即用户为坐姿时,显示单元130会显示是否将桌面切换到第二高度的选择信号;当升降桌的桌面高度为第二高度,即用户为站姿时,显示单元130会显示是否将桌面切换到第一高度的选择信号。例如用户保持坐姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经坐了很久了,站一会更有利于健康哦,是否同意”。或者,例如用户保持站姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经站了很久了,坐一会更有利于健康哦,是否同意”。
S632、输入单元获取用户的桌面高度确认信号。
具体的,当用户看到显示单元130显示的信息时,用户可以通过输入单元140输入桌面高度确认信号,如果用户确认显示单元130显示的信息,输入单元140将确认信息发送至控制单元110。其中,输入单元140例如可以是触控屏,也可以是语音采集器,也可以是键盘、鼠标等其他输入装置,这里并不进行限定。
S633、控制单元根据用户的桌面高度确认信号,控制桌面高度改变机构改变升降桌的桌面高度。
具体的,当输入单元140将确认信息发送至控制单元110,控制单元110就会控制桌面高度改变机构200按照显示单元130显示的信息改变升降桌的桌面高度。从而避免用户长时间保持一种姿态,保护用户健康。例如用户保持坐姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经坐了很久了,站一会更有利于健康哦,是否同意”,用户通过输入单元140输入“同意”的确认信息,控制单元110接收到确认信息后,控制单元110就会控制桌面高度改变机构200将桌面高度升高。或者,例如用户保持站姿时间大于或等于预设时间时,控制单元110控制显示单元130显示“您已经站了很久了,坐一会更有利于健康哦,是否同意”,用户通过输入单元140输入“同意”的确认信息,控制单元110接收到确认信息后,控制单元110就会控制桌面高度改变机构200将桌面高度降低。从而避免用户长时间保持一种姿态,保护用户健康。
可选地,S633、控制单元根据用户的桌面高度确认信号,控制桌面高度改变机构改变升降桌的桌面高度,包括:
S633a、用户的桌面确认信号和预设确认信号匹配,控制单元根据用户的姿态信息控制桌面高度改变机构改变升降桌的桌面高度。
具体的,如果用户的桌面确认信号和预设确认信号匹配,即用户通过输入单元140接受了显示单元130显示的建议信息,则控制单元121根据显示单元130显示的建议信息控制桌面高度改变机构200将桌面高度改变。从而使得用户改变姿态,避免久坐或久站。
S633b、控制单元将用户保持一种姿态的时间清零处理。
具体的,控制单元121控制桌面高度改变机构200将桌面高度改变后,控制单元110重新开始计时,将用户保持一种姿态的时间清零,从而重新开始计时。
或者,S633c、用户的桌面高度确认信号和预设确认信号不匹配,控制单元将用户保持一种姿态的时间清零处理。
具体的,如果用户的桌面高度确认信号和预设确认信号不匹配,即用户通过输入单元140拒绝了显示单元130显示的建议信息,则控制单元110将用户保持一种姿态的时间清零,从而重新开始计时。
可选地,S631、用户保持一种姿态的时间大于或等于预设时间时,显示单元显示桌面高度选择信号时还包括:
S634、报警单元发出桌面高度改变提醒信号。
具体的,当控制单元110接收到检测单元120发送的升降桌前有人的信息和用户的姿态信息时,开始计时,当控制单元110判断出用户保持一种姿态信息的时间大于或等于预设时间时,控制单元110发送信号至报警单元150,报警单元150就会发出建议改变桌面高度的提醒信号,当用户通过输入单元140输入确认信息后,控制单元110就会根据报警单元150的提醒信号控制桌面高度改变机构200改变桌面高度,从而对用户久坐或久站进行提醒,避免用户长时间保持一种姿态,保护用户健康。
示例性的,S631和S634可以同时执行,也可以只执行S631或只执行S634,这里并不进行限定。
本实施例提供的升降桌的控制方法由上述任意实施例的升降桌实现,本实施例提供的升降桌的控制方法实现原理和技术效果与上述实施例类似,此处不再赘述。
实施例五
图9是本发明实施例五提供的一种升降桌的控制方法的流程图,参见图9,升降桌的控制方法包括:
S910、距离传感器检测用户距离升降桌的桌面的垂直距离。
S920、控制子单元根据升降桌的桌面距离地面的高度信息和用户距离升降桌的桌面的垂直距离,确定用户的姿态信息。
S930、用户保持一种姿态的时间大于或等于预设时间时,显示单元显示桌面高度选择信号。
S940、输入单元获取用户的桌面高度确认信号。
S950、用户的桌面确认信号和预设确认信号匹配,控制单元根据用户的姿态信息控制桌面高度改变机构改变升降桌的桌面高度。
S960、控制单元将用户保持一种姿态的时间清零处理。
或者,S970、用户的桌面高度确认信号和预设确认信号不匹配,控制单元将用户保持一种姿态的时间清零处理。
S980、报警单元发出桌面高度改变提醒信号。
示例性的,S930和S980可以同时执行,也可以只执行S930或只执行S980,这里并不进行限定。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种升降桌腿以及包含升降桌腿的气动升降桌
- 同步升降桌控制电路、同步升降桌及同步升降桌系统