传感器模块、激光雷达传感器和运动机构
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种用于传感器的传感器模块、一种激光雷达传感器和一种运动机构。
背景技术
目前已知用于传感器覆盖装置(Sensorabdeckung)的不同清洁系统。所述覆盖装置尤其防止灰尘进入到传感器中并损坏传感器的敏感部件。但是,所述覆盖装置也具有允许传感器信号通过的任务。因此,相应的覆盖装置必须是干净的,以确保传感器的良好地运行。
GB 2535862 A1公开了一种用于覆盖装置的清洁膜,其中,该清洁膜内置在光学传感器的壳体中。
DE 102016006039 A1公开两个擦拭元件,它们与覆盖装置机械接触并以旋转方式对覆盖装置进行清洁。
此外,已知将集成的加热丝用于对覆盖装置进行除霜和除湿(参见DE102011122345 A1,DE 102014114363 A1和US 2017/3344397 A1)。
发明内容
根据第一方面,本发明涉及一种用于传感器的传感器模块。“传感器模块”在此可以理解为传感器的构件或组件。在本文中,“传感器”尤其应理解为超声传感器和/或激光雷达传感器和/或摄像机传感器和/或Li-CAM传感器和/或雷达传感器。传感器模块尤其包括具有如开篇所定义的覆盖装置的壳体件,该覆盖装置可以包括玻璃和/或聚碳酸酯和/或PMMA。传感器模块还包括清洁设备。该清洁设备包括流体喷嘴装置。借助所述流体喷嘴装置,可以例如借助压缩机来吸收周围环境空气并且在压力下将所述周围环境空气引入到包含在流体喷嘴装置中的第一流体喷嘴中。通过伯努利效应,借助第一流体喷嘴可以增加清洁所需的流动速度。该流体喷嘴装置能够借助马达沿着覆盖装置的表面运动。此外,流体喷嘴装置设计用于将流体流(例如气体,尤其周围环境空气,和/或水和/或气溶胶)传导到覆盖装置的表面上。换句话说,流体喷嘴装置可以借助马达、例如电动机如此运动,使得流体喷嘴装置能够将流体流通过第一流体喷嘴传导至覆盖装置的表面上的任何点。以这种方式,可以通过流体去除位于表面上的污垢颗粒,该流体由于伯努利效应而具有高的流动速度。例如,由第一流体喷嘴传导到覆盖装置的表面上的压缩空气可以用于从表面去除诸如灰尘的固体污垢颗粒,从而清洁表面的颗粒。尤其可以借助通过流体喷嘴传导到表面上的气溶胶和/或液体来去除固化的污垢。由于流体喷嘴装置沿覆盖装置的整个表面的机动的可移动性,因此可以在覆盖装置的任何点上有效地去除污垢。以这种方式,能够实现非接触式清洁机构,其中避免覆盖装置的表面的刮擦(Verkratzen)或磨损(Abrasion)。因此,可以提高覆盖装置的表面、尤其该表面上的涂层的使用寿命。此外,覆盖装置的表面可以通过施加到表面上的流体流(尤其在气流的情况下)来除湿。相应地,通过本发明可以提供适用于多个传感器的清洁的通用模块。此外,除了第一流体喷嘴之外,流体喷嘴装置还可以包括第二或第三或第四流体喷嘴等。
从属权利要求涉及本发明的有利的扩展方案。
根据一种有利的扩展方案,第一流体喷嘴包括第一排出开口。该第一排出开口可以例如点状地构型。通过点状的构型,可以有针对性地将流体流引导至覆盖装置的表面上具有污垢颗粒的点。污垢颗粒的定位可以例如借助摄像机来实现,该摄像机尤其可以布置在清洁设备上并且可以检测覆盖装置的表面。附加地或替代地,排出开口可以是线状的。通过这种线状的喷嘴,可以清洁覆盖玻璃的表面的更大范围。通过通过马达的、流体喷嘴或者说流体喷嘴装置的附加运动,借助线状的排出开口,能够快速且有效地清洁表面的大部分。
在另一有利的构型中,第一流体喷嘴具有第二排出开口,该第二排出开口设计用于将流体流传导到覆盖装置的表面上。在此,第一排出开口指向与第二排出开口不同的方向。例如,由第一排出开口和第二排出开口指向的方向限定的角度可以是30°至90°,尤其30°至60°。如果应清洁覆盖装置表面的某个区域,则可以沿该区域走过流体喷嘴的第一路段,其中,仅引导来自第一排出开口流体流。对来自第二排出开口的流体流的阻塞尤其可以通过阀回路来实现。在这种情况下,尤其可以针对所走过的路段的返程(Rückweg)如此阻塞流体流,使得不再从第一排出开口将流体流引导到表面上,并且在“返程”期间,又从第二排出开口将流体流引导到该区域上。这具有清洁效果的效率提高的优点,因为,在喷嘴借助马达运动期间,总是可以以流体流的最佳角度将最佳的流动横截面引导到覆盖装置的待清洁的表面或者说区域上。
根据本发明的传感器模块的另一有利的构型,第一流体喷嘴还设置成以相对于覆盖装置的表面法线成30°至60°的角度将流体流传导到覆盖装置上。该角度特别优选地为30°至45°。以这种方式,可以将通过喷嘴或者说伯努利效应产生的流体流以相对于污垢颗粒的最佳角度引导到表面上,使得进一步优化清洁效果。在小于30°的角度下,污垢颗粒或者说污垢仅被不理想地吹开(anblasen),由此降低清除颗粒的概率。在大于60°的角度下,尤其存在如下提高的风险,即所产生的流体流的过大的流动横截面被引导经过该表面,而无法实现所期望的清洁效果。
在根据本发明的传感器模块的另一有利的构型中,第一流体喷嘴的朝向第一排出开口逐渐缩窄的横截面可以是三角形的或圆形的。第一或第二排出开口尤其同样可以具有该横截面。这尤其确保沿着排出开口的压力均匀化。
根据另一有利的构型,第一流体喷嘴可以借助马达在直线和/或曲线形的轨迹上运动。以这种方式,根据本发明的传感器模块能够最佳地匹配于覆盖装置的表面的任何形状(例如凹的和/或凸的和/或平面的和/或有角的)。
按照根据本发明的传感器模块的一种有利的扩展方案,第一流体喷嘴可以设计为借助马达来实施自身旋转。以这种方式,除了沿着表面运动之外,流体喷嘴还可以与覆盖装置的表面的表面正交
在根据本发明的传感器模块的另一有利的构型中,清洁设备还可以具有加热装置,该加热装置设计用于对流体流进行温度调节。在至流体喷嘴的流入通道(Zulaufkanal)中,这种温度调节例如可以通过热交换器和/或加热丝来设置。此外,这种加热装置可以直接(例如同样以可电加热的加热丝的形式)布置在排出开口上。例如,在顽固的污垢的情况下,为了更好的清洁效果尤其可以通过流体流的温度调节将水蒸气传导到覆盖装置的表面上。另外,例如在加热的空气的情况下,流体流可用于为覆盖装置进行除霜。因此,除了根据本发明的传感器模块的清洁效果之外,还实现改善对顽固污垢或霜的去除。
根据本发明的以下方面具有带有如上所述的技术特征的有利的构型和扩展方案,并且具有根据本发明的组件的一般优点以及与之相关的技术效果。为了避免重复,因此接下来不再重新列举。
根据第二方面,本发明涉及一种激光雷达传感器,其包括根据本发明的第一方面的传感器模块。在这种情况下,覆盖装置尤其是激光雷达传感器的窗,该窗设置成允许特定于激光雷达的辐射穿过。
根据第三方面,本发明涉及一种运动机构,其包括根据本发明的第二方面的激光雷达传感器。在本发明的意义上,例如将车辆(尤其是轿车和/或卡车)和/或飞机和/或轮船和/或摩托车考虑为运动机构。
附图说明
下面参考附图详细描述本发明的实施例。附图示出:
图1示出根据本发明的激光雷达传感器的一种实施方式;
图2示出根据本发明的传感器模块的流体喷嘴的一种实施方式的图示。
图3示出根据本发明的传感器模块的流体喷嘴的一种实施方式的横截面的逐渐缩窄的图示;和
图4示出根据本发明的运动机构的实施方式。
具体实施方式
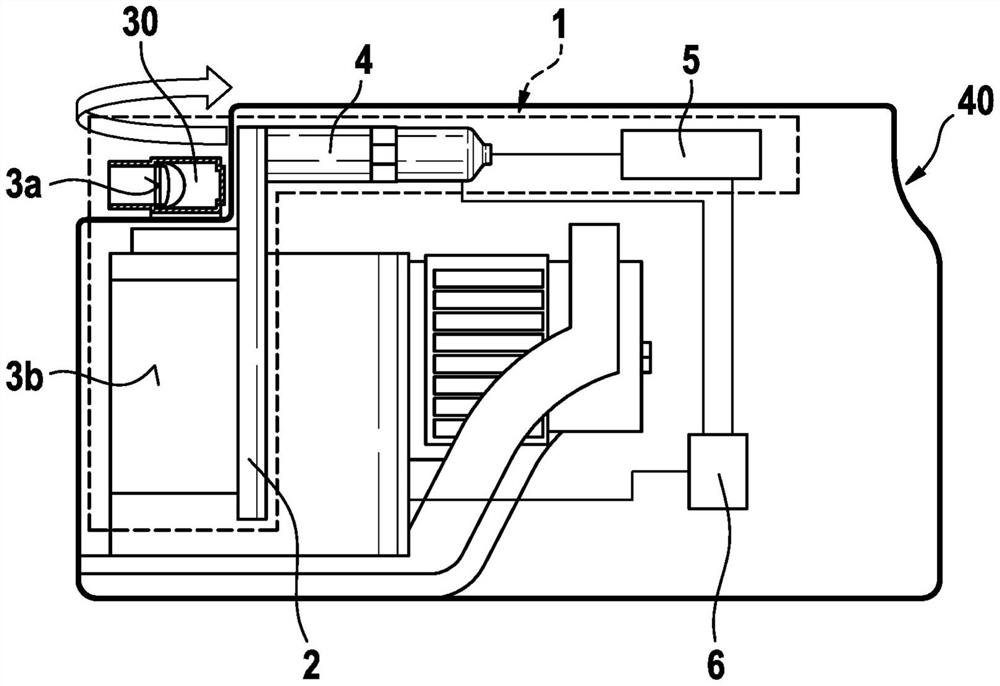
图1示出根据本发明的激光雷达传感器40的一种实施方式,该激光雷达传感器具有根据本发明的传感器模块1。附加地,可以将摄像机30与用于根据本发明的传感器模块1的激光雷达传感器40结合。根据本发明的传感器模块1包括第一流体喷嘴2。此外,激光雷达传感器包括覆盖装置的第二表面3b,激光雷达辐射能够通过该第二表面射出。此外,摄像机具有覆盖装置的第一表面3a,其中,覆盖装置在此尤其是摄像机镜头。第一和第二表面3a、3b可以通过流体流来清洁,通过第一流体喷嘴2将该流体流引导到所述表面3a、3b上。在此,马达4尤其可以在第一和第二表面3a、3b上沿着圆形路径引导第一流体喷嘴2,所述圆形路径由弯曲的箭头示出,第一流体喷嘴沿着流体喷嘴2的长
图2示出根据本发明的传感器模块1的第一流体喷嘴2的一种实施方式。在此,第一流体喷嘴2具有第一排出开口7a和第二排出开口7b。所述排出开口7a、7b指向由三角形箭头示出的不同的方向。以这种方式,可以通过马达4如此引导第一流体喷嘴2,使得在通过激光雷达传感器40的覆盖装置的第二表面3b的去程(Hinweg)中,仅从第一排出开口7a将流体流传导到左箭头的方向上。可以相应地通过阀阻塞第二排出开口7b,第二排出开口的方向由右箭头指示。如果第一流体喷嘴2以相同的路径返回,则可以在激活第二排出开口7b的同时禁用第一排出开口7a,由此,流体流可以在右箭头的方向射出到激光雷达传感器的第二表面3b上。因此,当结合图1观察图2的第二流体喷嘴2时,可以得出至摄像机30和激光雷达传感器40的第一和/或第二表面3a、3b上的最佳的流体引导。去程通过弯曲的箭头表示,而返程则延伸到与弯曲箭头相反的方向上。
图3示出根据本发明的第一流体喷嘴2的逐渐缩窄的横截面的轮廓P,而在右侧图示中示出三角形形状的逐渐缩窄的横截面Q。
图4示出根据本发明的运动机构50,其包括根据本发明的激光雷达传感器40。
- 传感器模块、激光雷达传感器和运动机构
- 光传感器模块、用于运行光传感器模块的方法和用于制造光传感器模块的方法