一种三维模型二维视图与裸眼三维影像双屏联动显示方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明属自由立体显示技术领域,具体涉及一种基于Optix和Leap Motion的三维模型二维视图与裸眼三维影像双屏联动显示方法。
背景技术
在传统的平面显示器上为患者的组织器官呈现直观的三维数字模型,是当下深受医生青睐的医学影像可视化方式。随着医疗领域对病例诊断、临床观摩、远程会诊、术前规划和术中导航等手段的高精度、临场感需求日益增长,这种方式的不足也逐渐凸显。二维视图不便于同时呈现患者解剖结构的多视角空间信息,导致画面的立体纵深感和动态交互性较差。而对于基于双目视差的立体显示媒介,其观察视点的数量较少,并且医生一般需要佩戴辅助设备,容易造成人眼视觉疲劳和视野受限,以及画面分辨率和亮度降低,尤其不利于长时间显微手术场合。相比之下,裸眼三维显示技术无需任何助视设备,就能为潜在病灶再现具有物理景深的三维光学影像,可以为医生带来更舒适的观看体验、更逼真的感官冲击和更优质的交互性能。平面显示技术已趋于成熟,二维视图画面清晰,而裸眼三维显示技术仍处于探索期,光学立体影像在清晰度、景深、视角等方面很难兼顾。因此,对三维模型的二维视图与裸眼三维影像进行双屏联动显示的方式,能够实现二者的优势互补,符合影像医学对复杂疑难病症体数据进行高清、立体、动态观测的重大需求,也能够助力虚拟现实与增强现实技术在医疗领域的应用普及和精准医疗水平的提质升级,具有研究的必要性和紧迫性。
上述联动显示方式需要做到以下几点:首先,为了保证两个屏幕在同一时刻的显示内容相同,二维视图和用于裸眼三维成像的二维合成图应该共用一套虚拟相机;其次,为了适用于手术等不便于医生直接接触鼠标和键盘的特殊场合,最好通过手势交互来隔空操控显示画面的视角和尺寸;最后,为了达到流畅的交互控制,二维视图和二维合成图的生成必须实时完成。
发明内容
本发明的目的在于提供一种基于Optix和Leap Motion的三维模型二维视图与裸眼三维影像双屏联动显示方法。Optix是一种基于NVIDIA CUDA通用计算架构的高性能光线追踪应用程序框架,这种渲染引擎能够对光线投射过程进行大幅加速,从而做到二维视图和二维合成图的快速绘制。Leap Motion是专为手势而设计的体感控制器,支持高帧率的手势识别与交互。本发明结合Optix和Leap Motion的优势,通过手势信息反馈、虚拟相机参数即时更新以及显示内容的实时渲染,实现三维医学模型表面二维视图和裸眼立体影像的同步呈现和手势操控,以解决上述背景技术中提出的问题。
本发明的一种三维模型二维视图与裸眼三维影像双屏联动显示方法,包括下列步骤:
1.1建立双屏联动显示系统:双屏联动显示系统由处理器1、Leap Motion体感控制器2、立体显示屏6和平面显示屏8组成,Leap Motion体感控制器2、立体显示屏6和平面显示屏8均与处理器1连接;其中处理器1配置有高性能光线追踪应用程序框架Optix;平面显示屏8的分辨率为W
1.2设置参数值:二维视图9与平面显示屏8的分辨率相同,二维合成图4与立体显示屏6的分辨率相同,虚拟相机阵的相机数量与立体显示屏6的视点数量相同,相邻虚拟相机焦点方向的夹角为θ,虚拟相机的视角为φ,手势交互3的手掌移动速度的有效范围为v
1.3将三维网格模型和二维合成图4的R、G、B三个通道的像素-视点对应矩阵M
1.4在处理器1的高性能光线追踪应用程序框架Optix场景中,创建汇聚式虚拟相机阵Cams,包括下列步骤:
1.4.1初始化中心相机Cam
光心位置Cam
焦点方向Cam
坐标轴向上方向Cam
其中:C为三维模型外接矩形框的中心点坐标;S
1.4.2初始化其它相机Cam
光心位置Cam
(Cam
焦点方向Cam
坐标轴向上方向Cam
其中:R(v,α)为环绕向量v旋转角度α得到的3×3旋转矩阵;
1.5设置一个参考虚拟相机Cam
1.6双屏联动显示三维模型的二维视图9和裸眼三维影像7,显示每一帧画面包括下列步骤:
1.6.1如果当前帧是第一帧,则执行步骤1.6.3;否则,执行步骤1.6.2;
1.6.2利用Leap Motion体感控制器2检测是否发生手势交互3,即手势交互3的手掌移动速度是否属于有效范围v
1.6.2.1更新中心相机Cam
Cam
Cam
u=cross(Cam
Cam
Cam
其中:β
1.6.2.2更新其它相机Cam
1.6.3利用Cam
1.6.4利用Cams和Optix的实时光线投射渲染器,为三维模型生成二维合成图4,并在立体显示屏6上全屏显示,二维合成图4发出的光线穿过立体显示屏6内部的柱透镜光栅5,形成裸眼三维影像7;计算二维合成图4的每个像素值包括下列步骤:
1.6.4.1分别获取该像素值所属的像素点(x,y)在R、G、B三个通道上对应的视点序号:j
1.6.4.2对于每个通道和对应的视点序号j,利用虚拟相机Cam
1.6.5如果关闭二维视图9,则关闭二维合成图4,显示过程结束;否则,转至下一帧,执行步骤1.6.2。
与现有技术相比,本发明的有益效果在于:本发明提出的三维模型二维视图与裸眼三维影像双屏联动显示方法,能分别在两个屏幕上同时展示患者组织器官的平面视图和裸眼立体影像,并且让医生利用手掌的旋转和抓取动作实时控制三维医学模型的观看角度和尺寸缩放,从而实现人体解剖结构多视角、多尺寸空间信息的交互观看,其舒适的观看体验、逼真的感官冲击和良好的交互性能,能推动当前的三维病灶观测手段从“伪立体”向“真三维”转变,显著提升高难度诊疗与手术的效率和可靠性。
附图说明
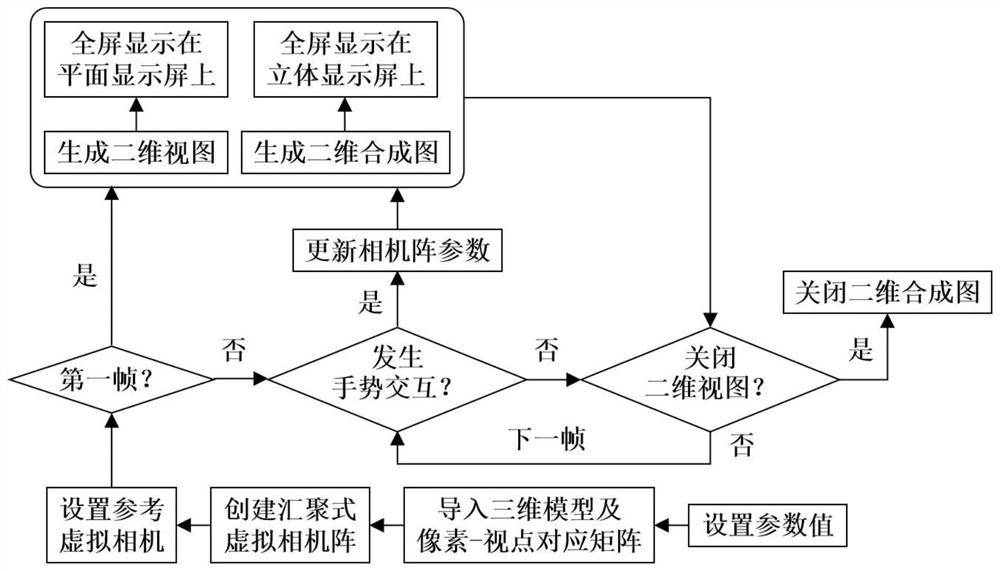
图1为三维模型二维视图与裸眼三维影像双屏联动显示方法的流程图。
图2为双屏联动显示系统的示意图,
其中:1.处理器 2.Leap Motion体感控制器 3.手势交互 4.二维合成图 5.柱透镜光栅 6.立体显示屏 7.裸眼三维影像 8.平面显示屏 9.二维视图。
图3为虚拟相机参数的示意图。
具体实施方式
下面结合附图描述本发明。
本发明的一种三维模型二维视图与裸眼三维影像双屏联动显示方法,包括下列步骤:
1.建立双屏联动显示系统,如图2所示:双屏联动显示系统由处理器1、LeapMotion体感控制器2、立体显示屏6和平面显示屏8组成,Leap Motion体感控制器2、立体显示屏6和平面显示屏8均与处理器1连接;其中处理器1配置有高性能光线追踪应用程序框架Optix;平面显示屏8的分辨率为W
2.设置参数值:二维视图9与平面显示屏8的分辨率相同;二维合成图4与立体显示屏6的分辨率相同;虚拟相机阵的相机数量与立体显示屏6的视点数量相同;相邻虚拟相机焦点方向的夹角为θ,虚拟相机的视角为φ,如图3所示;手势交互3的手掌移动速度的有效范围为v
3.将三维网格模型和二维合成图4的R、G、B三个通道的像素-视点对应矩阵M
4.在处理器1的高性能光线追踪应用程序框架Optix场景中,创建汇聚式虚拟相机阵Cams,虚拟相机参数如图3所示,创建Cams包括下列步骤:
4.1初始化中心相机Cam
光心位置Cam
焦点方向Cam
坐标轴向上方向Cam
其中:C为三维模型外接矩形框的中心点坐标;S
4.2初始化其它相机Cam
光心位置Cam
(Cam
焦点方向Cam
坐标轴向上方向Cam
其中:R(v,α)为环绕向量v旋转角度α得到的3×3旋转矩阵;
5.设置一个参考虚拟相机Cam
6.双屏联动显示三维模型的二维视图9和裸眼三维影像7,显示每一帧画面包括下列步骤:
6.1如果当前帧是第一帧,则执行步骤6.3;否则,执行步骤6.2;
6.2利用Leap Motion体感控制器2检测是否发生手势交互3,即手势交互3的手掌移动速度是否属于有效范围v
6.2.1更新中心相机Cam
Cam
Cam
u=cross(Cam
Cam
Cam
其中:β
6.2.2更新其它相机Cam
6.3利用Cam
6.4利用Cams和Optix的实时光线投射渲染器,为三维模型生成二维合成图4,并在立体显示屏6上全屏显示,二维合成图4发出的光线穿过立体显示屏6内部的柱透镜光栅5,形成裸眼三维影像7;计算二维合成图4的每个像素值包括下列步骤:
6.4.1分别获取该像素值所属的像素点(x,y)在R、G、B三个通道上对应的视点序号:j
6.4.2对于每个通道和对应的视点序号j,利用虚拟相机Cam
6.5如果关闭二维视图9,则关闭二维合成图4,显示过程结束;否则,转至下一帧,执行步骤6.2。
- 一种三维模型二维视图与裸眼三维影像双屏联动显示方法
- 一种三维模型二维视图与裸眼三维影像双屏联动显示方法