一种多固态激光雷达的外参标定方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种多固态激光雷达的外参标定方法,属于智能座舱显示领域。
背景技术
在自动驾驶领域中,激光雷达传感器作为一种重要的传感器不可或缺,目前,根据有无机械部件来分,激光雷达可分为机械激光雷达和固态激光雷达。机械激光雷达主要由光电二极管、MEMS反射镜、激光发射接受装置等组成,其中机械旋转部件是指可360°控制激光发射角度的MEMS发射镜。固态激光雷达则与机械激光雷达不同,它通过光学相控阵列(OpticalPhasedArray)、光子集成电路(PhotonicIC)以及远场辐射方向图(FarFieldRadiationPattern)等电子部件代替机械旋转部件实现发射激光角度的调整。目前固态激光雷达以其相对于机械式激光雷达较低的价格,具有更高的性价比。
但是固态激光雷达一般只具有一个固定的水平视角,实际使用时往往使用多个固态激光雷达来补足水平视角。因此,需要对多个固态激光雷达进行外参标定,将其统一至车辆坐标系下使用。
发明内容
本发明提供了一种多固态激光雷达的外参标定方法,以将每个固态激光雷达的数据统一至车辆坐标系下。此方法无需使用专门的标定房,适应范围广,且无需人工干预。
本发明为解决上述技术问题采用以下技术方案:
一种多固态激光雷达的外参标定方法,具体步骤如下:
步骤1:测量每个固态激光雷达传感器到车体坐标系的X,Y,Z三轴的偏移;
步骤2:使用绕八字法记录GPS传感器轨迹与每个固态激光雷达的轨迹;
步骤3:以步骤1中测量得到的偏移值作为输入,使用手眼标定算法,计算出每个固态激光雷达到GPS传感器坐标系的旋转平移变换;
步骤4:对所有固态激光雷达传感器的点云数据进行时间同步,以步骤3中计算出的旋转平移变换作为初始值,将处于同一时间戳下的点云数据使用正态分布变换NDT点云配准算法进行匹配,得到最终的每个固态激光雷达传感器到GPS传感器坐标系的旋转平移变换,再由GPS传感器坐标系转换至车体坐标系,即完成标定。
进一步,步骤1中使用测量尺测量每个固态激光雷达传感器到车体坐标系的X,Y,Z三轴的偏移。
进一步,车体坐标系中:以车辆后轴中心为原点,车头方向为X轴,车体正左方向为Y轴,车体正上方向为Z轴。
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
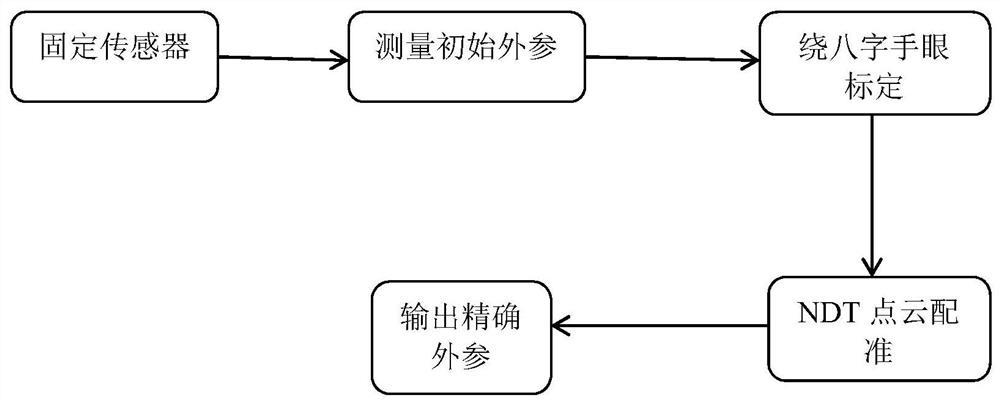
本发明多固态激光雷达的标定主要可以分为三个部分,第一部分是固定好传感器后,通过测量尺测量出一个粗略的初始值;第二部分是室外绕八字法的手眼标定,并以第一部分的初始值作为初值传入,进行迭代优化,得到一个较精确的外参;第三部分是使用NDT点云配准算法,以第二部分得到的较精确的外参作为初始值进行迭代匹配优化,最终收敛至一个精确的外参。本发明通过多次迭代的方法,即使初始测量的初值误差较大,最终也能够收全敛至一个较好的结果。现有的多传感器标定方案中,多数要使用标定房才能标定出较精确的外参值,而本发无需使用专门的标定房,适应范围广,且无需人工干预。
附图说明
图1是本发明的流程图。
具体实施方式
本发明中的多固态激光雷达标定主要可以分为三个部分,第一部分是固定好传感器后,通过测量尺测量出一个粗略的初始值;第二部分是室外绕八字法的手眼标定,并以第一部分的初始值作为初值传入,进行迭代优化,得到一个较精确的外参;第三部分是使用NDT点云配准算法,以第二部分得到的较精确的外参作为初始值进行迭代匹配优化,最终收敛至一个精确的外参。
本发明中共使用6颗固态激光雷达传感器,最终目标为将每个固态激光雷达的数据变换到以车辆后轴中心为原点,车头方向为X轴,车体正左方向为Y轴,车体正上方向为Z轴(即前-左-上)。因此只要将每个固态激光雷达传感器到车辆坐标系的外参标定出来,即可将点云数据转换至车辆坐标系下。如图1所示,包括以下具体步骤:
步骤1:使用测量尺测量每个固态激光雷达传感器到车体坐标系的X,Y,Z三轴的偏移,此步骤可以得到一个粗略的三轴距离偏移。
步骤2:在室外开阔场景中,使用绕八字法记录GPS轨迹与每个固态激光雷达的轨迹。
步骤3:使用手眼标定算法,传入步骤1中测量出的初始X,Y,Z轴的偏移,进行迭代优化计算出每个固态激光雷达到GPS传感器坐标系的旋转平移变换。
步骤4:对六颗固态激光雷达数据进行时间同步,将处于同一时间戳下的点云数据使用NDT点云配准算法进行匹配,根据步骤3中计算出的旋转平移变换作为初始值传入。不断迭代匹配,直至NDT匹配算法收敛,即得到最终每个固态激光雷达传感器到GPS传感器坐标系的旋转平移变换。再由GPS传感器坐标系转换至车辆坐标系下,即完成最终结果。
应当指出,以上实施例的说明只是用于帮助理解本申请的方法及其核心思想,对于本技术领域的普通技术人员来说,在不脱离本申请原理的前提下,还可以对本申请进行若干改进和修饰,这些改进和修饰也在本申请权利要求的保护范围内。
- 一种多固态激光雷达的外参标定方法
- 多激光雷达外参标定方法、标定装置、标定系统和电子设备