箱体组件、车辆和箱体的状态检测方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及运输技术领域,具体而言,涉及一种箱体组件、一种车辆、一种箱体的状态检测方法。
背景技术
随着粮食贸易的进行,过程监管及数字化监管无疑给大宗金融带来强有力的说服力和安全保障。然而,当前市面上的集装箱防盗装置并不能对箱体的状态进行监测,仅能被动的防止粮食漏失。
发明内容
本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
为此,本发明的一个方面在于提出了一种箱体组件。
本发明的另一个方面在于提出了一种车辆。
本发明的再一个方面在于提出了一种箱体的状态检测方法。
有鉴于此,根据本发明的一个方面,提出了一种箱体组件,包括:箱体,箱体设有开口,开口处设有箱门;挡板结构,设置在开口处,挡板结构用于封堵开口,挡板结构的外侧设置箱门;压力传感器,设置在挡板结构上,压力传感器用于检测箱体的压力信息;定位器,设置在挡板结构上,定位器用于获取定位信息;控制器,分别与压力传感器和定位器相连接,控制器用于响应于压力信息和定位信息确定箱体状态信息。
本发明提供的箱体组件,包括箱体、挡板结构、设置在挡板结构上的压力传感器和定位器,以及与压力传感器和定位器相连接的控制器。其中,箱体设有开口,开口处设有箱门,挡板结构设置在箱体的开口处,在挡板结构的外侧设置箱门。通过挡板结构来封堵开口,在箱体满载货物后,通过压力传感器检测货物和箱门共同作用在挡板结构上的压力信息,通过定位器对箱体进行定位,控制器结合压力信息和定位信息,对货物运输过程中的异动停留,异动压力值变化进行分析和报警,从而判断出箱体的状态,及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
其中,压力传感器和定位器以及控制器都安装在挡板结构上,一方面使挡板结构兼具防止粮食漏失和监控箱体状态的功能性,另一方面简化了箱体组件的安装结构,避免对箱体的进一步改装,同时也便于对各传感器进行维护。
具体地,控制器可以实时将定位信息以及挡板结构上的压力信息上报至服务器,以使服务器随时对运输过程中的异动、停留进行判断,从而能够及时有效监控箱体的状态,进而能够更加有效的对箱体运输进行管理和防盗。
具体地,箱体可为集装箱和集装箱式货车车厢。
此外,挡板结构便于安装,能够在业务中很好地推广使用而不需要额外的培训成本。
根据本发明的上述箱体组件,还可以具有以下技术特征:
在上述技术方案中,优选地,挡板结构包括:第一面板,第一面板用于插放在开口的底部;第二面板,第二面板与第一面板固定连接,第二面板的外侧设置箱门。
在该技术方案中,挡板结构包括第一面板和第二面板。第一面板用于插放在箱体开口的底部,第二面板与第一面板固定连接,在第二面板的外侧设置箱门。本发明提供的挡板结构,只需在装载运输前,将挡板结构的第一面板插放在箱体开口的底部即可,借助货物将挡板结构固定在箱体上,从而实现挡板结构与箱体的安装,使用上十分方便;同时可保证挡板结构不会自动掉落,通过第二面板来封堵开口,这样即使在箱门底部被破坏时,也可检测到压力异动值,可有效防止货物漏失;同时挡板结构与箱体之间相对独立,可以理解地,只要箱体类型与挡板结构匹配,在不同箱体间,挡板结构是通用的,从而使挡板结构更加实用;此外由于挡板结构独立于箱体,从而使其更加方便维护。
具体地,第一面板和第二面板形成L型挡板结构。
进一步地,第一面板和第二面板所形成L型挡板结构是一体式的挡板结构。
此外,第二面板与第一面板也可成一定角度连接,角度可调。
在上述任一技术方案中,优选地,压力传感器,包括:至少一个第一压力传感器,至少一个第一压力传感器按照预设间距设置在第二面板的内侧面的一侧;至少一个第二压力传感器,至少一个第二压力传感器按照预设间距设置在第二面板的内侧面的中间;至少一个第三压力传感器,至少一个第三压力传感器按照预设间距设置在第二面板的内侧面的另一侧。
在该技术方案中,压力传感器包括至少一个第一压力传感器、至少一个第二压力传感器和至少一个第三压力传感器。至少一个第一压力传感器按照预设间距设置在第二面板的内侧面的一侧,至少一个第二压力传感器按照预设间距设置在该内侧面的中间,至少一个第三压力传感器按照预设间距设置在该内侧面的另一侧,从而能够更全面的监测箱体异动对挡板结构所造成的压力波动,进一步地,根据不同位置上的压力传感器的压力变化值,结合定位信息,综合分析箱体的状态,能够更加准确地判断箱体状态情况,更加有效地对运输中的箱体进行监管和防盗,提高箱体运输安全。
具体地,可以按照第二面板的高度或宽度确定预设间距。
在上述任一技术方案中,优选地,第一面板与第二面板之间的夹角为90°;第一面板的宽度和第二面板的宽度均与开口的宽度相等。
在该技术方案中,第一面板与第二面板之间的夹角为90°,第一面板的宽度和第二面板的宽度相等,即L型挡板结构。进一步地,第一面板的宽度和第二面板的宽度均与箱体开口的宽度相等,从而在箱门遭到破坏时,可以有效防止粮食漏失。
在上述任一技术方案中,优选地,第一面板的长度范围为:30cm至50cm;第二面板的高度范围为:20cm至80cm;第一面板的厚度范围为:1cm至10cm;第二面板的厚度范围为:1cm至20cm。
在该技术方案中,第一面板的长度范围为30cm至50cm,但不限于此,第一面板的长度不能过短,过短不利于挡板结构固定在箱体上的稳定性,从而影响压力异动值检测的准确性,也不利于挡板结构防止货物漏失,同时也无需过长,避免不必要的资源浪费。
第二面板的高度范围为20cm至80cm,但不限于此,第二面板的高度只要能够保证挡板结构兼具封堵漏失货物与上述监控功能即可。
第一面板的厚度范围为1cm至10cm,但不限于此,第一面板的厚度范围不能过薄,避免变形。
第二面板的厚度范围为1cm至20cm,但不限于此,第二面板的厚度不能过薄,一方面避免变形,另一方面也要考虑各传感器及控制器的安装对其厚度的影响,以提高挡板结构在检测上的可靠性以及使用寿命。
在上述任一技术方案中,优选地,箱体组件还包括:振动传感器,设置在挡板结构上,振动传感器用于检测箱体的振动信息;控制器,与振动传感器相连接,控制器用于响应于压力信息、振动信息以及定位信息确定箱体状态信息。
在该技术方案中,箱体组件还包括振动传感器,振动传感器设置在挡板结构上,并与控制器连接。通过振动传感器检测箱体的振动信息,控制器结合压力信息、定位信息与振动信息对箱体的异动情况进行判断,从而判断出箱体的状态,比如箱体被破坏,包括箱门或挡板结构是否已经被破坏,或者正在被拆卸,或者是否有提前卸货风险等,进一步地,针对不同检测分析结果给出不同的预警,异常位置锁定,并且可以向后台管理中心发送箱体运力,比如司机、车辆基本信息,从而锁定异常负责人、时间点、路线等,更好地对箱体运输进行管理和防盗,提高箱体(如集装箱)运输安全。
具体地,控制器可以实时将定位信息、振动信息以及挡板结构上的压力信息上报至网络客户端,以使网络客户端随时对运输过程中的异动、停留进行判断,从而能够及时有效监控箱体的状态,进而能够更加有效的对箱体运输进行管理和防盗。
在上述任一技术方案中,优选地,振动传感器设置在第二面板的内侧面上。
在该技术方案中,压力传感器、定位器、振动传感器以及控制器均设置在第二面板的内侧面上,箱体满载货物并发生异动时,比如箱门被拆卸或箱体倾斜时,第二面板的内侧面所受影响更加明显,从而能够及时、准确地检测到箱体异动信息。
在上述任一技术方案中,优选地,箱体组件还包括:电源模块,与控制器相连接,电源模块用于为控制器供电。
在该技术方案中,箱体组件还包括电源模块,电源模块与控制器连接,从而能够为控制器供电,确保箱体组件的监控功能稳定运行。
在上述任一技术方案中,优选地,箱体组件还包括:警报模块,与控制器相连接,用于报警。
在该技术方案中,箱体组件还包括警报模块,警报模块响应于控制器的指令而报警,具体地,可响应于不同的指令发出不同的警报。
根据本发明的另一个方面,提出了一种车辆,包括如上述任一技术方案中的箱体组件。
本发明提供的车辆,包括如上述任一技术方案中的箱体组件,因而该车辆包括上述任一技术方案的箱体组件的全部有益效果。
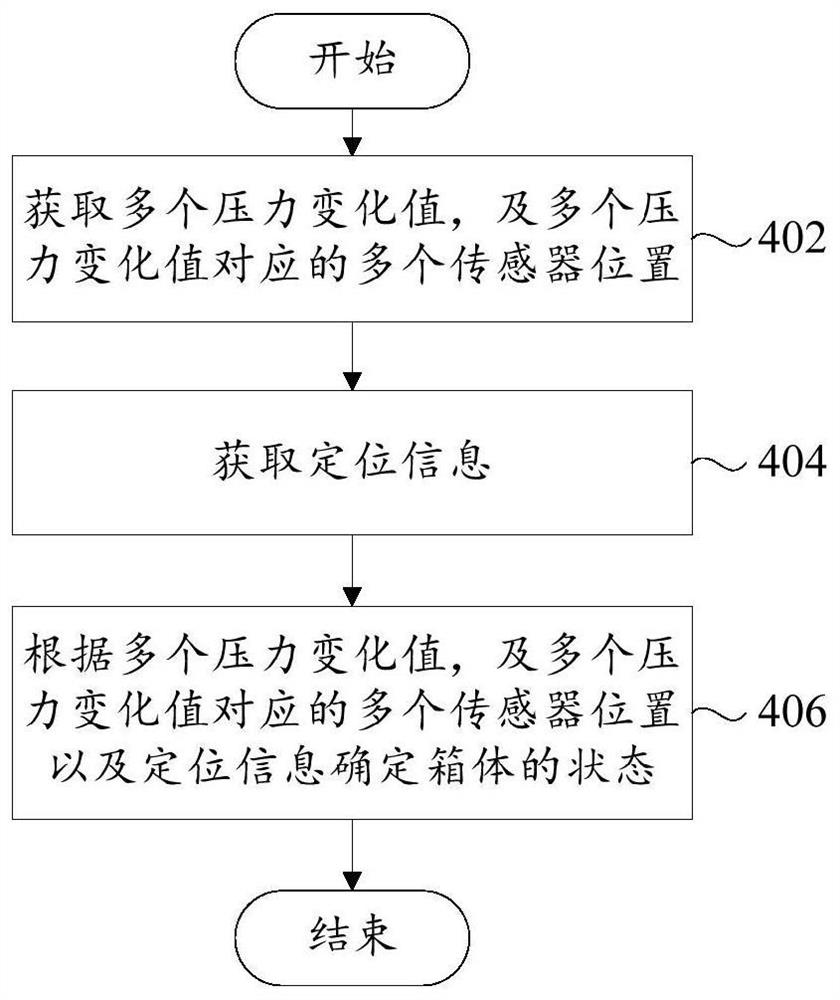
根据本发明的再一个方面,提出了一种箱体的状态检测方法,用于上述任一技术方案的箱体组件,方法包括:获取多个压力变化值,及多个压力变化值对应的多个传感器位置;获取定位信息;根据多个压力变化值,及多个压力变化值对应的多个传感器位置以及定位信息确定箱体的状态。
本发明提供的箱体的状态检测方法,运输过程中,通过挡板结构上的多个压力传感器采集货物及箱门共同作用在挡板结构上的多个压力值,将每个压力值与对应的初始值作差,从而获得多个压力变化值,通过定位器采集箱体的定位信息,依据多个压力变化值和定位信息,对货物运输过程中的异动停留,异动压力值变化进行分析和报警,从而判断出箱体的状态,及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
其中,将箱门关闭加装铅封后,控制器记录各个传感器的压力值,视为初始值。
具体地,可以实时获取定位信息以及挡板结构上的压力信息,从而随时对运输过程中的异动、停留进行判断,从而能够及时有效监控箱体的状态,进而能够更加有效的对箱体运输进行管理和防盗。
具体地,箱体可为集装箱和集装箱式货车车厢。
在上述任一技术方案中,优选地,根据多个压力变化值,及多个压力变化值对应的多个传感器位置以及定位信息确定箱体的状态的步骤,具体包括:当压力变化值大于预设压力阈值,传感器位置包括第一预设位置和/或第二预设位置,且定位箱体运输在途时,判断定位信息是否异常;当判断定位信息异常时,确定箱体已被破坏;当判断定位信息无异常时,判断压力变化值是否在预设范围内波动;当判断压力变化值在预设范围内波动,并确定当前路况为急弯路或上下坡路时,确定箱体的状态为正常;当压力变化值大于预设压力阈值,传感器位置为第一预设位置和/或第二预设位置,且定位箱体在目的地时,确定箱体的状态为正常。
在该技术方案中,实时或者按照一定时间间隔获取多个压力传感器对应的多个压力变化值,获取定位信息;当两个以上压力变化值大于预设压力阈值时,首先确定压力传感器的位置,同时定位箱体位置;当传感器位置在挡板结构的第一预设位置和/或第二预设位置,且定位箱体运输在途时,进一步判断定位信息是否异常,比如在预设时长内定位信息有无轨迹,或者轨迹是否偏离行驶路线等;当判断定位信息异常时,则确定箱体已被破坏,货物有被盗风险;当判断定位信息无异常时,进一步判断压力变化值是否在预设范围内波动,如果判断结果为是,则进一步定位当前路况是否为急弯路或者上下坡路,如果定位当前路况是急弯或者比较陡的坡路,则视为急弯路、比较陡的坡路导致的压力变动,箱体的状态为正常,此时可记录异常信息并上报给后台管理中心,但是不进行偷盗风险预警。
当压力变化值大于预设压力阈值,并且传感器位置为第一预设位置和/或第二预设位置,并且定位箱体在目的地时,则视为箱体正常卸货,箱体的状态正常。
通过本发明的箱体的状态检测方法,可以随时将异动的压力值,GPS定位信息及时回传,同时结合传感器位置信息对箱体的异动停留进行分析和预警,能够及时、准确地监控箱体的状态,及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
预设压力阈值的绝对值大于或等于100kPa,小于或等于250kPa。
第一预设位置和第二预设位置分别对应的是挡板结构第二面板的内侧面的一侧上设置的至少一个第一压力传感器中任一第一压力传感器的位置,和另一侧上设置的至少一个第三压力传感器中任一第三压力传感器的位置。
在上述任一技术方案中,优选地,根据多个压力变化值,及多个压力变化值对应的多个传感器位置以及定位信息确定箱体的状态的步骤,具体还包括:当传感器位置包括第一预设位置和第三预设位置,或第二预设位置和第三预设位置,且定位箱体运输在途时,判断定位信息是否有异常;当判断定位信息异常时,确定箱体正在被拆卸。
在该技术方案中,当传感器位置包括第一预设位置和第三预设位置,或者传感器位置包括第二预设位置和第三预设位置,并且定位箱体运输在途时,并且判断定位信息有异常时,视为箱体正在被破坏,箱门或者挡板结构可能在拆卸中,货物有可能被偷盗,给出预警。通过本发明的箱体的状态检测方法,能够对箱体被破坏的情况进行较为准确的分析,从而能够及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
在上述任一技术方案中,箱体组件包括振动传感器,方法还包括:当压力变化值大于预设压力阈值,且定位箱体运输在途时,获取振动值;判断振动值是否大于预设振动阈值;当判断结果为是时,确定箱体正在被拆卸;否则,确定箱体的状态为正常;当压力变化值大于预设压力阈值,且定位箱体在始发地时,确定箱体的状态为正常。
在该技术方案中,当只有一个压力变化值大于预设压力阈值,并且定位箱体运输在途时,通过设置在挡板结构上的振动传感器获取振动值,将振动值与预设振动阈值进行比较,从而判断振动值是否超出正常范围,如果振动值超出了正常范围,则视为箱体正在被拆卸,如果振动值没有超出正常范围,则视为箱体的状态正常。通过本发明的技术方案,对于不同情况下的压力异动值,采取不同的监控方案,从而能够更加全面的监控箱体的状态。
本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1是本申请一个实施例的箱体组件中挡板结构示意图;
图2是本申请一个实施例的箱体组件的数据传输示意图;
图3是本申请一个实施例的箱体组件的示意图;
图4是本申请一个实施例的车辆的示意框图;
图5是本申请一个实施例的箱体的状态检测方法的流程图之一;
图6是本申请一个实施例的箱体的状态检测方法的流程图之二;
图7是本申请一个实施例的箱体的状态检测方法的流程图之三;
图8是本申请一个实施例的箱体的状态检测方法的流程图之四。
图1至图4中附图标记:
1箱体组件,10挡板结构,102第一面板,104第二面板,12压力传感器,122第一压力传感器,124第二压力传感器,126第三压力传感器,14定位器,16控制器,18振动传感器,20电源模块,22警报模块,300车辆。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
下面结合图1至图8描述根据本申请实施例的箱体组件、车辆和箱体的状态检测方法。
实施例一:
如图1至图3所示,根据本发明一些实施例的箱体组件1,包括:箱体,箱体设有开口,开口处设有箱门;挡板结构10,设置在开口处,挡板结构10用于封堵开口,挡板结构的外侧设置箱门;压力传感器12,设置在挡板结构10上,压力传感器12用于检测箱体的压力信息;定位器14,设置在挡板结构10上,定位器14用于获取定位信息;控制器16,分别与压力传感器12和定位器14相连接,控制器16用于响应于压力信息和定位信息确定箱体状态信息。
本实施例提供的箱体组件1,包括箱体、挡板结构10、设置在挡板结构10上的压力传感器12和定位器14,以及与压力传感器12和定位器14相连接的控制器16。其中,箱体设有开口,开口处设有箱门,挡板结构10设置在箱体的开口处,在挡板结构10的外侧设置箱门。通过挡板结构10来封堵开口,在箱体满载货物后,通过压力传感器12检测货物和箱门共同作用在挡板结构10上的压力信息,通过定位器14对箱体进行定位,控制器16结合压力信息和定位信息,对货物运输过程中的异动停留,异动压力值变化进行分析和报警,从而判断出箱体的状态,及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
其中,压力传感器12和定位器14以及控制器16都安装在挡板结构10上,一方面使挡板结构10兼具防止粮食漏失和监控箱体状态的功能性,另一方面简化了箱体组件1的安装结构,避免对箱体的进一步改装,同时也便于对挡板结构10上的各传感器和控制器16进行维护。
具体地,如图1和图2所示,控制器16为MCU控制器,控制器16可以实时将定位信息以及挡板结构10上的压力信息上报至网络客户端,以使网络客户端随时对运输过程中的异动停留进行判断,从而能够及时有效监控箱体的状态,进而能够更加有效的对箱体运输进行管理和防盗。
具体地,箱体可为集装箱和集装箱式货车车厢。
此外,挡板结构10便于安装,能够在业务中很好地推广使用而不需要额外的培训成本。
实施例二:
在上述实施例中,如图1所示,挡板结构10包括:第一面板102,第一面板102用于插放在开口的底部;第二面板104,第二面板104与第一面板102固定连接,第二面板104的外侧设置箱门。
在该实施例中,挡板结构10包括第一面板102和第二面板104。第一面板102用于插放在箱体开口的底部,第二面板104与第一面板102固定连接,在第二面板104的外侧设置箱门。本发明提供的挡板结构10,只需在装载运输前,将挡板结构10的第一面板102插放在箱体开口的底部即可,借助货物将挡板结构10固定在箱体上,从而实现挡板结构10与箱体的安装,使用上十分方便;同时可保证挡板结构10不会自动掉落,通过第二面板104来封堵开口,这样即使在箱门底部被破坏时,也可检测到压力异动值,可有效防止货物漏失;同时挡板结构10与箱体之间相对独立,可以理解地,只要箱体类型与挡板结构10匹配,在不同箱体间,挡板结构10是通用的,从而使挡板结构10更加实用;此外由于挡板结构10独立于箱体,从而使其更加方便维护。
具体地,第一面板102和第二面板104之间的夹角范围为:0°至180°。
具体地,第一面板102和第二面板104形成L型挡板结构。
进一步地,第一面板102和第二面板104所形成L型挡板结构是一体式的挡板结构。
具体地,第二面板104与第一面板102也可成一定角度连接,角度可调。
实施例三:
在上述任一实施例中,压力传感器12,包括:至少一个第一压力传感器122,至少一个第一压力传感器122按照预设间距设置在第二面板104的内侧面的一侧;至少一个第二压力传感器124,至少一个第二压力传感器124按照预设间距设置在第二面板104的内侧面的中间;至少一个第三压力传感器126,至少一个第三压力传感器126按照预设间距设置在第二面板104的内侧面的另一侧。
在该实施例中,压力传感器12包括至少一个第一压力传感器122、至少一个第二压力传感器124和至少一个第三压力传感器126。至少一个第一压力传感器122按照预设间距设置在第二面板104的内侧面的一侧,至少一个第二压力传感器124按照预设间距设置在该内侧面的中间,至少一个第三压力传感器126按照预设间距设置在该内侧面的另一侧,从而能够更全面的监测箱体异动对挡板结构10所造成的压力波动,进一步地,根据不同位置上压力传感器的压力变化值,结合定位信息,综合分析箱体的状态,能够更加准确地判断箱体状态情况,更加有效地对运输中的箱体进行监管和防盗,提高箱体运输安全。
具体地,可以按照第二面板104的高度或宽度确定预设间距。
具体地,如图1所示,压力传感器12包括:一个第一压力传感器122,设置在第二面板104的内侧面的一侧;一个第二压力传感器124,设置在第二面板104的内侧面的中间;一个第三压力传感器126,设置在第二面板104的内侧面的另一侧。
具体地,在第二面板104的内侧面的两侧,均设置数量相同的多个压力传感器,且均每间隔10cm设置一个压力传感器。在第二面板104的内侧面的中间设置一个压力传感器。
实施例四:
在上述任一实施例中,如图1所示,第一面板102与第二面板104之间的夹角为90°;第一面板102的宽度和第二面板104的宽度均与开口的宽度相等。
在该实施例中,第一面板102与第二面板104之间的夹角为90°,第一面板102的宽度和第二面板104的宽度相等,即L型挡板结构。进一步地,第一面板102的宽度和第二面板104的宽度均与箱体开口的宽度相等,从而在箱门遭到破坏时,可以有效防止粮食漏失。
实施例五:
在上述任一实施例中,第一面板102的长度范围为:30cm至50cm;第二面板104的高度范围为:20cm至80cm;第一面板102的厚度范围为:1cm至10cm;第二面板104的厚度范围为:1cm至20cm。
在该实施例中,第一面板102的长度范围为30cm至50cm,但不限于此,第一面板102的长度不能过短,过短不利于挡板结构10固定在箱体上的稳定性,从而影响压力异动值检测的准确性,也不利于挡板结构10防止货物漏失,同时也无需过长,避免不必要的资源浪费。
具体地,第一面板102的长度可取30cm、40cm、45cm等。
第二面板104的高度范围为20cm至80cm,但不限于此,第二面板104的高度只要能够保证挡板结构10兼具封堵漏失货物与上述监控功能即可。
具体地,第二面板104的高度可取25cm、40cm、60cm等。
第一面板102的厚度范围为1cm至10cm,但不限于此,第一面板102的厚度范围不能过薄,避免变形。
具体地,第一面板102的厚度可取1cm、3cm、5cm、8cm等。
第二面板104的厚度范围为1cm至20cm,但不限于此,第二面板104的厚度不能过薄,一方面避免变形,另一方面也要考虑各传感器及控制器16的安装对其厚度的影响,以提高挡板结构10在检测上的可靠性以及使用寿命。
具体地,第二面板104的厚度可取5cm、10cm、15cm等。
实施例六:
在上述任一实施例中,如图2所示,箱体组件1还包括:振动传感器18,设置在挡板结构10上,振动传感器18用于检测箱体的振动信息;控制器16,与振动传感器18相连接,控制器16用于响应于压力信息、振动信息以及定位信息确定箱体状态信息。
在该实施例中,箱体组件1还包括振动传感器18,振动传感器18设置在挡板结构10上,并与控制器16连接。通过振动传感器18检测箱体的振动信息,控制器16结合压力信息、定位信息与振动信息对箱体的异动情况进行判断,从而判断出箱体的状态,比如箱体被破坏,包括箱门或挡板结构是否已经被破坏,或者正在被拆卸,或者是否有提前卸货风险等,进一步地,针对不同检测分析结果给出不同的预警,异常位置锁定,并且可以向后台管理中心发送箱体运力,比如司机、车辆基本信息,从而锁定异常负责人、时间点、路线等,更好地对箱体运输进行管理和防盗,提高箱体(如集装箱)运输安全。
具体地,控制器16可以实时将定位信息、振动信息以及挡板结构上的压力信息上报至网络客户端,以使网络客户端随时对运输过程中的异动、停留进行判断,从而能够及时有效监控箱体的状态,进而能够更加有效的对箱体运输进行管理和防盗。
实施例七:
在上述任一实施例中,振动传感器18设置在第二面板104的内侧面上。
在该实施例中,压力传感器、定位器14、振动传感器18以及控制器16均设置在第二面板104的内侧面上,箱体满载货物并发生异动时,比如箱门被拆卸或箱体倾斜时,第二面板104的内侧面所受影响更加明显,从而能够及时、准确地检测到箱体异动信息。
实施例八:
在上述任一实施例中,如图1和图3所示,箱体组件1还包括:电源模块20,与控制器16相连接,电源模块20用于为控制器16供电。
在该实施例中,箱体组件1还包括电源模块20,电源模块20与控制器16连接,从而能够为控制器16供电,确保箱体组件1的监控功能稳定运行。
实施例九:
在上述任一实施例中,如图2和图3所示,箱体组件1还包括:警报模块22,与控制器16相连接,用于报警。
在该实施例中,箱体组件1还包括警报模块22,警报模块22响应于控制器16的指令而报警,具体地,可响应于不同的指令发出不同的警报。
根据本发明的再一个方面实施例,提出了一种箱体的状态检测方法,用于上述任一技术方案的箱体组件1。
实施例十:
图4是本申请一个实施例的车辆300的示意框图。其中,该车辆300包括如上述任一实施例中的箱体组件1。
本实施例提供的车辆300,包括如上述任一实施例中的箱体组件1,因而该车辆300包括上述任一实施例的箱体组件1的全部有益效果。
实施例十一:
图5是本申请一个实施例的箱体的状态检测方法的流程图之一。其中,该箱体的状态检测方法包括:
步骤402,获取多个压力变化值,及多个压力变化值对应的多个传感器位置;
步骤404,获取定位信息;
步骤406,根据多个压力变化值,及多个压力变化值对应的多个传感器位置以及定位信息确定箱体的状态。
本实施例提供的箱体的状态检测方法,运输过程中,通过挡板结构上的多个压力传感器采集货物及箱门共同作用在挡板结构上的多个压力值,将每个压力值与对应的初始值作差,从而获得多个压力变化值,通过定位器采集箱体的定位信息,依据多个压力变化值和定位信息,对货物运输过程中的异动停留,异动压力值变化进行分析和报警,从而判断出箱体的状态,及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
其中,将箱门关闭加装铅封后,控制器记录各个传感器的压力值,视为初始值。
具体地,可以实时获取定位信息以及挡板结构上的压力信息,从而随时对运输过程中的异动、停留进行判断,从而能够及时有效监控箱体的状态,进而能够更加有效的对箱体运输进行管理和防盗。
具体地,箱体可为集装箱和集装箱式货车车厢。
实施例十二:
图6是本申请一个实施例的箱体的状态检测方法的流程图之二。其中,该箱体的状态检测方法包括:
步骤502,获取多个压力变化值,及多个压力变化值对应的多个传感器位置;
步骤504,获取定位信息;
步骤506,当压力变化值大于预设压力阈值时,确定传感器位置包括第一预设位置和/或第二预设位置,且定位箱体运输在途;
步骤508,判断定位信息是否异常;判断结果为是,执行步骤510,判断结果为否,执行步骤512;
步骤510,确定箱体已被破坏,发出对应预警信息;
步骤512,判断压力变化值是否在预设范围内波动;判断结果为是,执行步骤514,判断结果为否,执行步骤516;
步骤514,确定当前路况为急弯路或上下坡路时,则确定箱体的状态为正常;
步骤516,视为箱体组件传感器故障,发出对应预警信息。
在该实施例中,实时或者按照一定时间间隔获取多个压力传感器对应的多个压力变化值,获取定位信息;当两个以上压力变化值大于预设压力阈值时,首先确定压力传感器的位置,同时定位箱体位置;当传感器位置在挡板结构的第一预设位置和/或第二预设位置,且定位箱体运输在途时,进一步判断定位信息是否异常,比如在预设时长内定位信息有无轨迹,或者轨迹是否偏离行驶路线等;当判断定位信息异常时,则确定箱体已被破坏,货物有被盗风险;当判断定位信息无异常时,进一步判断压力变化值是否在预设范围内波动,如果判断结果为是,则进一步定位当前路况是否为急弯路或者上下坡路,如果定位当前路况是急弯或者比较陡的坡路,则视为急弯路、比较陡的坡路导致的压力变动,箱体的状态为正常,此时可记录异常信息并上报给后台管理中心,但是不进行偷盗风险预警。
进一步地,当压力变化值大于预设压力阈值,并且传感器位置为第一预设位置和/或第二预设位置,并且定位箱体在目的地时,则视为箱体正常卸货,箱体的状态正常。
本实施例的箱体的状态检测方法,可以随时将异动的压力值,GPS定位信息及时回传,同时结合传感器位置信息对箱体的异动停留进行分析和预警,能够及时、准确地监控箱体的状态,及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
预设压力阈值的绝对值大于或等于100kPa,小于或等于250kPa。
第一预设位置和第二预设位置分别对应的是挡板结构第二面板的内侧面的一侧上设置的至少一个第一压力传感器中任一第一压力传感器的位置,和另一侧上设置的至少一个第三压力传感器中任一第三压力传感器的位置。
实施例十三:
图7是本申请一个实施例的箱体的状态检测方法的流程图之三。其中,该箱体的状态检测方法包括:
步骤602,获取多个压力变化值,及多个压力变化值对应的多个传感器位置;
步骤604,获取定位信息;
步骤606,当压力变化值大于预设压力阈值,确定传感器位置包括第一预设位置和第三预设位置、或确定传感器位置包括第二预设位置和第三预设位置,且定位箱体运输在途;
步骤608,判断定位信息是否有异常;
步骤610,当判断定位信息异常时,确定箱体正在被拆卸。
在该实施例中,当传感器位置包括第一预设位置和第三预设位置,或者传感器位置包括第二预设位置和第三预设位置,并且定位箱体运输在途时,并且判断定位信息有异常时,视为箱体正在被破坏,箱门或者挡板结构可能在拆卸中,货物有可能被偷盗,给出预警。通过本发明的箱体的状态检测方法,能够对箱体被破坏的情况进行较为准确的分析,从而能够及时定位和获知货物损失,进而将损失责任到人,建立完备的箱体货运监管体系。
实施例十四:
图8是本申请一个实施例的箱体的状态检测方法的流程图之四。其中,该箱体的状态检测方法包括:
步骤702,获取多个压力变化值,及多个压力变化值对应的多个传感器位置;
步骤704,获取定位信息;
步骤706,当压力变化值大于预设压力阈值时,定位箱体位置;定位箱体运输在途,执行步骤708,定位箱体在始发地,执行步骤714;
步骤708,定位箱体运输在途时,获取振动值;
步骤710,判断振动值是否大于预设振动阈值;若是,执行步骤712;
步骤712,确定箱体正在被拆卸;
步骤714,定位箱体在始发地时,确定箱体的状态为正常。
在该实施例中,当只有一个压力变化值大于预设压力阈值,并且定位箱体运输在途时,通过设置在挡板结构上的振动传感器获取振动值,将振动值与预设振动阈值进行比较,从而判断振动值是否超出正常范围,如果振动值超出了正常范围,则视为箱体正在被拆卸,如果振动值没有超出正常范围,则视为箱体的状态正常。通过本发明的实施例,对于不同情况下的压力异动值,采取不同的监控方案,从而能够更加全面的监控箱体的状态。若振动值小于预设振动阈值,视为箱体状态正常。
实施例十五:
如图1至图3所示,本实施例的箱体组件1包含集装箱(运输粮食)、电源模块20包括3V的MCU直流电源,挡板结构10,安装在挡板结构10上的压力传感器12、定位器14、控制器16以及振动传感器,其中,定位器14为GPS模块,控制器16为MCU控制器,并通过TCP/IP协议接入公共通讯网络,与后台管理中心联网通信。
挡板结构10,专门安装在集装箱门底(即集装箱开口的底部)的装置,防止集装箱门体(即箱门)底部破坏导致的粮食漏失。
在第二面板104两边,中间加装压力传感器,粮食装载完毕后,加装该挡板结构10后,集装箱门关闭加装铅封后,系统记录各个传感器的压力值,视为初始值,当该值在运过程中,各自变动超过上下200kPa,视为有恶意粮食破坏的可能,给出警报。
在该挡板结构10上加装GPS定位装置,会对整个集装箱的行进路线进行信息上报,在压力值发出警报后,结合GPS定位信息,如果在该定位信息前后5分钟有轨迹停顿或者偏离正常航道情况,则给出警报,提示货物已存在被盗风险。
挡板底部(第一面板102)主要用于插放在集装箱门口的粮食底部,板子厚度(T1)为1cm~10cm厚度的板,材质可以根据实际情况任意设置,长度(L)为30cm~50cm,宽度(W)视安装位置而定。
1、如果是后开门式集装箱,则根据集装箱的箱型而定,为集装箱内侧宽度值,如表1:
表1
2、如果是侧开门式集装箱,如表2:
表2
此外,侧面挡板(即第二面板104)形态可以为多样,板子厚度(T2)为1cm~20cm厚度的板,板子的宽度与底部板子(即第一面板102)的宽度相等,高度范围为20cm~80cm之间。
箱体的状态检测方法:
3个压力传感器:2个分别安装在第二面板104的两侧,一个安装在侧板的中间。1个振动传感器,安装在第二面板104的任意位置。
当其中一个传感器值波动范围>200kPa时:
(1)一个出现异动,另外无异动,GPS无轨迹,且当前定位在始发地2km范围内,认为可能传感器异常,不算安全异动。
(2)如果GPS有轨迹,且当前定位不在始发地,在道路过程中行进,振动传感器无异动,则认为可能传感器异常,不算安全异动。
(3)如果GPS有轨迹,且当前定位不在始发地,振动传感器有异动,则认为可能存在粮食被偷盗的可能,给出异动预警,平台收到异动预警将异动通知车队长或者平台运营人员,对车辆进行异动记录,同时联系司机了解情况。
其中两个传感器波动范围>200kPa时,给出预警:
两个出现异动,判断两个传感器的安装位置,如果均在两侧:
(1)如果GPS定位在途,且2分钟范围内无任何移动,视为挡板被拆卸或者箱体被破坏,给出预警。
(2)如果GPS定位在途,且2分钟一直移动,并且压力值在200kPa不断上下波动,需要GPS精确判断当前道路是否处于弯路,下坡或者上坡道路,如果是,视为急弯路,较陡的上下坡导致的压力变动,记录异常信息并上报给车队长和平台管理员,但是不进行粮食偷盗风险预警。
(3)如果GPS定位在目的地,则视为正常卸载,无需预警。
两个出现异动,判断两个传感器的安装位置,如果一个在侧面,一个在中间:
(1)如果GPS定位在途,且2分钟范围内无任何移动,视为箱体或者挡板可能在拆卸中,给出预警。
(2)如果GPS定位在途,且2分钟一直移动,并且压力值在200kPa不断上下波动,需要GPS精确判断当前道路是否处于弯路,下坡或者上坡道路,如果是,视为急弯路,较陡的上下坡导致的压力变动,记录异常信息并上报给车队长和平台管理员,但是不进行粮食偷盗风险预警。
(3)如果GPS定位在目的地,则视为正常卸载,无需预警。
3个传感器全部预警:
(1)如果GPS定位在途,直接给出预警。
(2)如果GPS定位在起点或者终点,视为正常。
侧边根据第二面板104的高度,间隔10cm安装一个压力传感器,假设为n。1个振动传感器,安装在第二面板104的任意位置。
当其中一个传感器值波动范围>200kPa时:
(1)一个出现异动,另外无异动,GPS无轨迹,且当前定位在始发地2km范围内,认为可能传感器异常,不算安全异动。
(2)如果GPS有轨迹,且当前定位不在始发地,在道路过程中行进,振动传感器无异动,则认为可能传感器异常,不算安全异动。
(3)如果GPS有轨迹,且当前定位不在始发地,振动传感器有异动,则认为可能存在粮食被偷盗的可能,给出异动预警,平台收到异动预警将异动通知车队长或者平台运营人员,对车辆进行异动记录,同时联系司机了解情况。
其中侧面至少两个传感器波动范围>200kPa时,给出预警:
判断传感器的安装位置,如果均在两侧:
(1)如果GPS定位在途,且2分钟范围内无任何移动,视为挡板被拆卸或者箱体被破坏,给出预警。
(2)如果GPS定位在途,且2分钟一直移动,并且压力值在200kPa不断上下波动,需要GPS精确判断当前道路是否处于弯路,下坡或者上坡道路,如果是,视为急弯路,较陡的上下坡导致的压力变动,记录异常信息并上报给车队长和平台管理员,但是不进行粮食偷盗风险预警。
(3)如果GPS定位在目的地,则视为正常卸载,无需预警。
判断传感器的安装位置,如果至少一个在中间,其余在两侧:
(1)如果GPS定位在途,且2分钟范围内无任何移动,视为箱体或者挡板可能在拆卸中,给出预警。
(2)如果GPS定位在途,且2分钟一直移动,并且压力值在200kPa不断上下波动,需要GPS精确判断当前道路是否处于弯路,下坡或者上坡道路,如果是,视为急弯路,较陡的上下坡导致的压力变动,记录异常信息并上报给车队长和平台管理员,但是不进行粮食偷盗风险预警。
(3)如果GPS定位在目的地,则视为正常卸载,无需预警。
其中侧面≥2个传感器波动范围>200kPa时,中间安装的1个传感器异动,给出预警:
(1)如果GPS定位在途,直接给出预警。
(2)如果GPS定位在起点或者终点,视为正常。
本实施例提供的箱体组件1是一种应用于集装箱粮食运输的防偷盗的智能服务装置,具有异常警报,行进路程跟踪,异常位置锁定的特性,并且可以向后台管理中心发送集装箱运力,司机,车辆基本信息,锁定异常责任人,时间点,路线,地点的综合方案,提高集装箱粮食运输安全。
采用无线通信,稳定信好,准确性高,可以随时将异动的压力值,GPS定位信息及时回传,及时监控系统;另外挡板便于安装,能够在业务中很好地推广使用而不需要额外的培训成本。
在本说明书的描述中,术语“第一”、“第二”仅用于描述的目的,而不能理解为指示或暗示相对重要性,除非另有明确的规定和限定;术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 箱体组件、车辆和箱体的状态检测方法
- 箱体组件、电池包及车辆