一种能够进行重心调节的无人机及其使用方法
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及无人机技术领域,具体为一种能够进行重心调节的无人机及其使用方法。
背景技术
货运是无人机应用场景中重要的组成部分,无人机货运即利用无线电遥控设备和自备的程序控制装置操纵的无人驾驶的低空飞行器运载包裹,自动送达目的地,其优点主要在于解决偏远地区的配送问题,提高配送效率,同时减少人力成本。
但是目前无人机货运有如下缺点:恶劣天气下无人机会送货无力,无法避免人为破坏等,并且由于需要运送的货物的重心位置不同会使无人机在货运过程中保持抬头或俯冲状态,此状态会额外消耗能源。
发明内容
本发明的目的在于提供一种能够进行重心调节的无人机及其使用方法,用于克服现有技术中的上述缺陷。
根据本发明的一种能够进行重心调节的无人机,包括机体与加货架,所述机体的前后侧面各固设有一个机翼,前后两个所述机翼内各设有一个能够使所述机体垂直升降的升降装置,所述机体右侧面内设有一号电机,所述一号电机右侧面通过一号转动轴安装有一号螺旋桨,所述机体上侧面内设有向上开口的一号空腔,所述一号空腔内设有当所述升降装置或所述一号螺旋桨损坏时启动的迫降装置,所述机体下侧面设有四根阵列分布的固定杆,所述固定板的下侧面都安装有转轮,所述机体下侧面的前后两侧各固设有一个支撑台,前后两个所述支撑台都位于前后的所述支撑台之间,每根所述支撑台下侧面都固设有一号挂杆,所述一号挂杆向左延伸至所述机体的左侧并且所述一号挂杆的左侧末端安装有向左上倾斜的一号限位杆,所述一号挂杆上能够挂设货物并且所述机体下侧面设有能够将挂设于所述一号挂杆上的货物的重心摆正的调节装置,所述加货架内设有左右贯通的一号通孔,所述一号通孔内设有向右的风扇,所述一号通孔下侧的所述加货架右壁内设有一号弹簧槽,所述一号弹簧槽向右下倾斜并且所述一号弹簧槽内左右滑动连接有向右延伸至所述一号弹簧槽右侧的二号挂杆,所述二号挂杆的右侧末端固设有二号限位杆,所述二号限位杆与所述二号挂杆的上侧面内设有压力传感器,所述二号挂杆左侧面通过一号弹簧连接于所述一号弹簧槽左侧面,所述一号弹簧槽左侧面固设有能够吸引所述二号挂杆的一号电磁铁,所述二号挂杆环面上固设有一号限位块,所述一号限位块右侧的一号弹簧槽环面上设有二号限位块。
可选的,右侧的所述机体面上设有导流板。
可选的,以位于前侧的所述机翼内的升降装置为例,所述升降装置包括设于所述机翼上侧面内左右贯通的固定槽,所述固定槽下侧面内抵接放置有驱动杆,所述驱动杆延伸至所述固定槽的左右两侧并且所述驱动杆上侧面的左右两端各设有一个螺旋装置,所述螺旋装置能够带动其内的扇叶转动来提供向上的升力,所述固定槽后侧面内连通设有二号弹簧槽,所述二号弹簧槽后侧面固设有二号电磁铁并且所述二号弹簧槽内前后滑动连接有一号盖板,所述一号盖板的下侧面抵接于所述驱动杆的上侧面以限制所述驱动杆的运动,所述一号盖板通过数根二号弹簧连接于所述二号弹簧槽后侧面,所述驱动杆下侧的所述固定槽内前后滑动连接有刀面向后的切线剪,所述切线剪与所述一号盖板都能够被所述二号电磁铁吸引。
可选的,所述迫降装置包括所述一号空腔内向下贯通的二号通孔,所述一号空腔内放置有降落伞并且所述降落伞上侧的所述一号空腔右壁上铰接有二号盖板,所述二号盖板左侧的所述一号空腔左壁内设有三号弹簧槽,所述三号弹簧槽内设有三号限位块,所述三号限位块左侧面通过二号弹簧连接于所述所述三号弹簧槽左侧面并且所述三号弹簧槽环面上设有能够吸引所述三号限位块的三号电磁铁,所述二号盖板的上侧面抵接于所述三号限位块的下侧面。
可选的,所述调节装置包括调节盒,所述调节盒内设有左右贯通的二号空腔并且两根所述一号挂杆都贯穿所述二号空腔,所述二号空腔后侧的所述调节盒内设有三号空腔并且所述三号空腔后侧面内设有向后贯通的三号通孔,所述调节盒后侧面上固设有二号电机,所述二号电机前侧面安装有通过所述三号通孔并转动连接于三号空腔前侧面内的二号转动轴,所述二号转动轴上安装有一号齿轮,所述三号空腔前壁内设有向前贯通至所述二号空腔内呈上下分布的四号通孔与五号通孔,所述三号空腔前壁内转动连接有分别通过所述四号通孔与五号通孔进入所述二号空腔内的三号转动轴与四号转动轴,所述三号转动轴通过同步带与所述二号转动轴连接并且位于所述二号空腔内的所述三号转动轴末端安装有一号抵接轮,所述四号转动轴上安装有与所述一号齿轮啮合的二号齿轮并且所述四号转动轴转动转动连接于所述二号空腔前侧面内,位于所述二号空腔内的所述四号转动轴上安装有与所述一号抵接轮对应的二号抵接轮,所述二号抵接轮前侧的所述四号转动轴上安装有与所述二号抵接轮对称分布的三号抵接轮。
可选的,所述一号抵接轮与所述二号抵接轮能够夹持位于后侧的所述一号挂杆,所述三号抵接轮能够抵接于前侧的所述一号挂杆。
可选的,所述四号转动轴左侧的所述二号空腔顶壁上铰接有两个挂钩,所述挂钩能够分别抵接于两个所述一号挂杆的上侧面,所述二号空腔顶壁内设有能够吸引所述挂钩的四号电磁铁。
可选的,所述支撑台右侧的所述机体下侧面固设有三号电机,所述三号电机左侧面安装有贯穿所述二号空腔并延伸至所述一号限位杆左侧的螺纹轴,所述螺纹轴上螺纹连接有推动块并且所述推动块的前后侧面抵接于两根所述一号挂杆的前后侧面,所述推动块的上侧面高于所述一号挂杆的上侧面。
可选的,所述推动块向左运动至极限处时所述推动块的左侧面位于所述螺纹轴左端的左侧。
一种能够进行重心调节的无人机的使用方法,具体步骤如下:
第一步 将机体放置于加货架右侧的地面上,当需要本发明进行物资运输时将打包好的货物的把手穿过二号限位块放置于二号挂杆上侧,此时由于重力使得一号弹簧拉伸并使二号挂杆向右下滑动直至一号限位块抵接于二号限位块,此时压力传感器检测货物的重量并依据货物的重量计算风扇的功率;
第二步 此时工作人员启动机体并使机体上升一定高度,之后工作人员使机体向左飞行并使一号限位杆位于把手之中,之后机体继续爬升,此时压力传感器检测到压力减小即表明货物已被取走,此时压力传感器控制一号电磁铁通电并使风扇通电,一号电磁铁通电时吸引二号挂杆向左滑动放置其触碰到飞行中机体内的螺纹轴,风扇通电时制造向右的流动风并吹向机体防止机体的突然受重而向左撞击货架,被一号限位杆拾取的货物会向右滑动并抵接于挂钩的上侧面,此时四号电磁铁通电,四号电磁铁通电时吸引挂钩使得货物的把手被固定于二号空腔内,此时货物被固定于调节盒内,之后二号电机通电,二号电机通电时带动二号转动轴旋转,二号转动轴通过同步带、一号齿轮与二号齿轮使三号转动轴与四号转动轴转动,三号转动轴与四号转动轴能够通过带动一号抵接轮、二号抵接轮与三号抵接轮使调节盒相对于一号挂杆左右运动,此时二号电机能够使调节盒带动货物向右运动以调整货物与机体的重心,当机体调整完成后一号电磁铁断电、风扇断电并且二号电机断电;
第三步 当本发明运送货物至目标地点时四号电磁铁断电并且三号电机通电使带动螺纹轴转动,螺纹轴转动时带动推动块向左推动货物的把手,当推动块运动到左极限处时货物被推出并坠落于目标地点,之后三号电机带动螺纹轴反向旋转,在推动块复位后三号电机断电,之后二号电机通电带动调节盒复位,此时机体开始返航;
第四步 当本发明运送过程中发生意外失控时二号电磁铁通电,二号电磁铁通电时吸引一号盖板与切线剪向内滑动,切线剪滑动时能够切断连接驱动杆的线缆并且一号盖板向内滑动时驱动杆失去支撑点使得支撑杆脱落,之后三号电磁铁通电,三号电磁铁通电时吸引三号限位块使得二号盖板旋转,此时一号空腔开放,此时气流通过二号通孔进入一号空腔并使降落伞展开,此时展开的降落伞不会被螺旋装置破坏,此时失控的机体由于降落伞会减小受损以及伤人的风险。
本发明的有益效果是:本发明的无人机能够自动调节装载的货物的位置以调节无人机加上货物的整体重心,有效的增加了无人机的稳定性;
本发明能够在失控时自动使降落伞生效,减小了无人机伤人的可能性与无人机的损坏程度;
本发明的无人机配备有与之适配的加货架使得本发明的无人机能够在工作人员不直接接触的情况下进行货物的装载。
附图说明
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
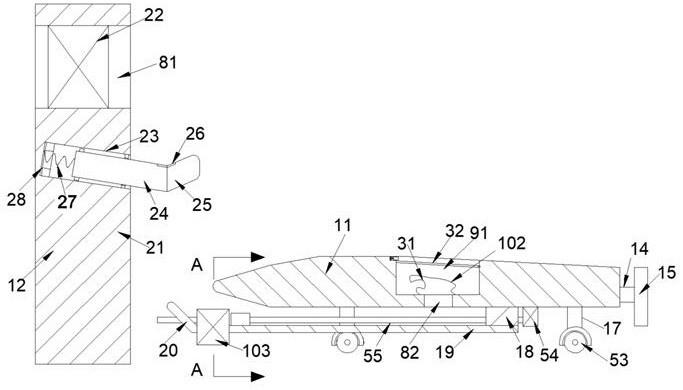
图1是本发明的一种能够进行重心调节的无人机的结构示意图;
图2是图1中二号盖板处结构示意图;
图3是图1中机体的俯视示意图;
图4是图1中A-A处的结构示意图;
图5是本发明中挂钩处的剖视图。
具体实施方式
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
参照图1-5,根据本发明的实施例的一种能够进行重心调节的无人机,包括机体11与加货架12,所述机体11的前后侧面各固设有一个机翼13,前后两个所述机翼13内各设有一个能够使所述机体11垂直升降的升降装置101,所述机体11右侧面内设有一号电机,所述一号电机右侧面通过一号转动轴14安装有一号螺旋桨15,所述机体11上侧面内设有向上开口的一号空腔91,所述一号空腔91内设有当所述升降装置101或所述一号螺旋桨15损坏时启动的迫降装置102,所述机体11下侧面设有四根阵列分布的固定杆17,所述固定板17的下侧面都安装有转轮57,所述机体11下侧面的前后两侧各固设有一个支撑台18,前后两个所述支撑台18都位于前后的所述支撑台18之间,每根所述支撑台18下侧面都固设有一号挂杆19,所述一号挂杆19向左延伸至所述机体11的左侧并且所述一号挂杆19的左侧末端安装有向左上倾斜的一号限位杆20,所述一号挂杆19上能够挂设货物并且所述机体11下侧面设有能够将挂设于所述一号挂杆19上的货物的重心摆正的调节装置103,所述加货架12内设有左右贯通的一号通孔81,所述一号通孔81内设有向右的风扇22,所述一号通孔81下侧的所述加货架12右壁内设有一号弹簧槽23,所述一号弹簧槽23向右下倾斜并且所述一号弹簧槽23内左右滑动连接有向右延伸至所述一号弹簧槽23右侧的二号挂杆24,所述二号挂杆24的右侧末端固设有二号限位杆25,所述二号限位杆25与所述二号挂杆24的上侧面内设有压力传感器26,所述二号挂杆24左侧面通过一号弹簧27连接于所述一号弹簧槽23左侧面,所述一号弹簧槽23左侧面固设有能够吸引所述二号挂杆24的一号电磁铁28,所述二号挂杆24环面上固设有一号限位块,所述一号限位块右侧的一号弹簧槽23环面上设有二号限位块。
优选的,右侧的所述机体11面上设有导流板16。
优选的,以位于前侧的所述机翼13内的升降装置101为例,所述升降装置101包括设于所述机翼13上侧面内左右贯通的固定槽29,所述固定槽29下侧面内抵接放置有驱动杆30,所述驱动杆30延伸至所述固定槽29的左右两侧并且所述驱动杆30上侧面的左右两端各设有一个螺旋装置104,所述螺旋装置104能够带动其内的扇叶转动来提供向上的升力,所述固定槽29后侧面内连通设有二号弹簧槽37,所述二号弹簧槽37后侧面固设有二号电磁铁38并且所述二号弹簧槽37内前后滑动连接有一号盖板39,所述一号盖板39的下侧面抵接于所述驱动杆30的上侧面以限制所述驱动杆30的运动,所述一号盖板39通过数根二号弹簧40连接于所述二号弹簧槽37后侧面,所述驱动杆30下侧的所述固定槽29内前后滑动连接有刀面向后的切线剪,所述切线剪与所述一号盖板39都能够被所述二号电磁铁38吸引。
优选的,所述迫降装置102包括所述一号空腔91内向下贯通的二号通孔82,所述一号空腔91内放置有降落伞31并且所述降落伞31上侧的所述一号空腔91右壁上铰接有二号盖板32,所述二号盖板32左侧的所述一号空腔91左壁内设有三号弹簧槽33,所述三号弹簧槽33内设有三号限位块34,所述三号限位块34左侧面通过二号弹簧35连接于所述所述三号弹簧槽33左侧面并且所述三号弹簧槽33环面上设有能够吸引所述三号限位块34的三号电磁铁36,所述二号盖板32的上侧面抵接于所述三号限位块34的下侧面。
优选的,所述调节装置103包括调节盒41,所述调节盒41内设有左右贯通的二号空腔92并且两根所述一号挂杆19都贯穿所述二号空腔92,所述二号空腔92后侧的所述调节盒41内设有三号空腔93并且所述三号空腔93后侧面内设有向后贯通的三号通孔83,所述调节盒41后侧面上固设有二号电机42,所述二号电机前侧面安装有通过所述三号通孔83并转动连接于三号空腔93前侧面内的二号转动轴43,所述二号转动轴43上安装有一号齿轮44,所述三号空腔93前壁内设有向前贯通至所述二号空腔93内呈上下分布的四号通孔84与五号通孔85,所述三号空腔93前壁内转动连接有分别通过所述四号通孔84与五号通孔85进入所述二号空腔92内的三号转动轴47与四号转动轴45,所述三号转动轴47通过同步带49与所述二号转动轴43连接并且位于所述二号空腔92内的所述三号转动轴47末端安装有一号抵接轮48,所述四号转动轴45上安装有与所述一号齿轮44啮合的二号齿轮46并且所述四号转动轴45转动转动连接于所述二号空腔92前侧面内,位于所述二号空腔92内的所述四号转动轴45上安装有与所述一号抵接轮48对应的二号抵接轮50,所述二号抵接轮50前侧的所述四号转动轴45上安装有与所述二号抵接轮50对称分布的三号抵接轮51。
优选的,所述一号抵接轮48与所述二号抵接轮50能够夹持位于后侧的所述一号挂杆19,所述三号抵接轮51能够抵接于前侧的所述一号挂杆19。
优选的,所述四号转动轴45左侧的所述二号空腔92顶壁上铰接有两个挂钩52,所述挂钩52能够分别抵接于两个所述一号挂杆19的上侧面,所述二号空腔92顶壁内设有能够吸引所述挂钩52的四号电磁铁53。
优选的,所述支撑台18右侧的所述机体11下侧面固设有三号电机54,所述三号电机54左侧面安装有贯穿所述二号空腔92并延伸至所述一号限位杆20左侧的螺纹轴55,所述螺纹轴55上螺纹连接有推动块56并且所述推动块56的前后侧面抵接于两根所述一号挂杆19的前后侧面,所述推动块56的上侧面高于所述一号挂杆19的上侧面。
优选的,所述推动块56向左运动至极限处时所述推动块56的左侧面位于所述螺纹轴55左端的左侧。
一种能够进行重心调节的无人机的使用方法,具体步骤如下:
第一步 将机体11放置于加货架12右侧的地面上,当需要本发明进行物资运输时将打包好的货物的把手穿过二号限位块25放置于二号挂杆24上侧,此时由于重力使得一号弹簧27拉伸并使二号挂杆24向右下滑动直至一号限位块抵接于二号限位块,此时压力传感器检测货物的重量并依据货物的重量计算风扇22的功率;
第二步 此时工作人员启动机体11并使机体11上升一定高度,之后工作人员使机体11向左飞行并使一号限位杆20位于把手之中,之后机体11继续爬升,此时压力传感器26检测到压力减小即表明货物已被取走,此时压力传感器26控制一号电磁铁28通电并使风扇22通电,一号电磁铁28通电时吸引二号挂杆24向左滑动放置其触碰到飞行中机体11内的螺纹轴55,风扇22通电时制造向右的流动风并吹向机体11防止11机体11的突然受重而向左撞击货架,被一号限位杆20拾取的货物会向右滑动并抵接于挂钩52的上侧面,此时四号电磁铁53通电,四号电磁铁53通电时吸引挂钩52使得货物的把手被固定于二号空腔92内,此时货物被固定于调节盒41内,之后二号电机42通电,二号电机42通电时带动二号转动轴43旋转,二号转动轴43通过同步带43、一号齿轮44与二号齿轮46使三号转动轴47与四号转动轴45转动,三号转动轴47与四号转动轴45能够通过带动一号抵接轮48、二号抵接轮50与三号抵接轮51使调节盒41相对于一号挂杆19左右运动,此时二号电机42能够使调节盒41带动货物向右运动以调整货物与机体11的重心,当机体11调整完成后一号电磁铁28断电、风扇22断电并且二号电机42断电;
第三步 当本发明运送货物至目标地点时四号电磁铁53断电并且三号电机54通电使带动螺纹轴55转动,螺纹轴55转动时带动推动块56向左推动货物的把手,当推动块56运动到左极限处时货物被推出并坠落于目标地点,之后三号电机54带动螺纹轴55反向旋转,在推动块56复位后三号电机54断电,之后二号电机42通电带动调节盒41复位,此时机体11开始返航;
第四步 当本发明运送过程中发生意外失控时二号电磁铁38通电,二号电磁铁38通电时吸引一号盖板39与切线剪向内滑动,切线剪滑动时能够切断连接驱动杆30的线缆并且一号盖板39向内滑动时驱动杆30失去支撑点使得支撑杆30脱落,之后三号电磁铁36通电,三号电磁铁36通电时吸引三号限位块34使得二号盖板32旋转,此时一号空腔91开放,此时气流通过二号通孔82进入一号空腔91并使降落伞展开,此时展开的降落伞不会被螺旋装置104破坏,此时失控的机体11由于降落伞会减小受损以及伤人的风险。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种能够进行重心调节的无人机及其使用方法
- 一种能够调节的物流无人机及其使用方法