一种跌倒检测方法及系统
文献发布时间:2023-06-19 11:27:38
技术领域
本申请涉及跌倒检测技术领域,特别是涉及一种跌倒检测方法及系统。
背景技术
近年来,随着人口平均寿命的增加和社会适龄劳动人口比例的下降,加之医护人员的大量短缺,老弱病残群体的看护成本不断上升,另外,跌倒致病、致残是直接或间接导致老弱病残群体伤亡的重要原因。因此,研究一种精度高、稳定性好、实时性强的跌倒检测系统变得越来越重要。
现有的跌倒检测方法主要有两种:一种是基于视频图像的跌倒识别技术;另一种是基于可穿戴的智能装备进行跌倒识别技术。基于视频图像的跌倒识别技术,需要在固定位置安装视频设备,并且成本较高;而现有的基于可穿戴智能装备的跌倒检测技术,一般应用加速度传感器进行跌倒检测,并应用UWB(超带宽,Ultra Wide Band)定位等方式进行定位。然而,单一的加速度传感器也无法保证跌倒检测的准确性;配合加速度传感器使用的UWB定位是一种新型无线通讯技术,其使用纳秒或者微秒级别以下的极窄脉冲实现无线传输,定位精度高,可以达到厘米级别,但由于在3D空间内定位时,需要使用至少4个不在同一平面的锚点实现对标签的定位,其硬件成本较高;可穿戴智能装备中的其它设备容易受到其他信号的干扰,定位精度较低,功耗较高。
发明内容
本申请主要解决的技术问题是提供一种跌倒检测方法及系统,能够利用基于两个锚点的UWB定位系统实现对目标的跌倒检测和位置追踪,保障目标的安全,有效降低硬件成本和算法难度,提高定位精度,减少误报、漏报的情况。
为解决上述技术问题,本申请采用的一个技术方案是:提供一种跌倒检测方法,包括:根据UWB定位系统获取目标的位置信息,其中,所述UWB定位系统包括处于同一铅垂线上的两个锚点,所述位置信息包括所述目标与地面之间的高度信息;根据预设时间间隔内所述目标的所述高度信息判断所述目标是否跌倒;若是,则触发报警。
其中,所述根据预设时间间隔内所述目标的所述高度信息判断所述目标是否跌倒的步骤包括:获得第一预设时间间隔内所述目标的所述高度信息的变化值;判断所述变化值是否大于第一阈值。
其中,所述根据预设时间间隔内所述目标的所述高度信息判断所述目标是否跌倒的步骤包括:判断在第二预设时间间隔内所述目标的所述高度信息是否一直小于第二阈值。
其中,所述UWB定位系统还包括固定设置于所述目标上的标签。
其中,所述根据UWB定位系统获取目标的位置信息的步骤包括:获得位于同一坐标系中所述两个锚点的坐标信息、以及所述标签与每个所述锚点之间的距离;利用所述两个锚点的坐标信息、所述距离、以及定位算法计算获得所述标签在所述坐标系中的坐标信息。
其中,所述定位算法包括ToF定位算法。
为解决上述技术问题,本申请采用的另一个技术方案是:提供一种跌倒检测系统,包括:相互耦接的UWB定位系统和处理器,其中,所述UWB定位系统包括两个锚点,所述两个锚点处于同一铅垂线上;所述处理器与所述UWB定位系统相互配合以实现上述任一实施例所提及的跌倒检测方法。
其中,所述UWB定位系统包括标签;其中,所述标签用于与目标固定,且所述标签能够以脉冲形式发送信号至所述锚点。
其中,所述跌倒检测系统还包括电源管理模块,用于检测所述系统中不同模块的用电情况并根据所检测到的用电情况分配相应的电源。
其中,所述跌倒检测系统还包括:无线通信模块,与所述处理器耦接,用于在所述处理器触发报警后,上报所述目标的位置信息。
区别于现有技术的情况,本申请的有益效果是:本申请中提供一种跌倒检测系统及方法,根据UWB定位系统获取目标的位置信息,其中,所述UWB定位系统包括处于同一铅垂线上的两个锚点,所述位置信息包括所述目标与地面之间的高度信息;根据预设时间间隔内所述目标的所述高度信息判断所述目标是否跌倒;若是,则触发报警。通过上述实施方式,基于双锚点的UWB定位系统能够实现对目标的位置区域追踪,便于医护人员根据提供的位置区域寻找到目标,从而及时开展救援工作,保障了目标的安全;利用单一的UWB定位系统的高度信息实现对目标的跌倒检测,有效降低了算法难度;定位系统中仅使用两个处于同一铅垂线上的锚点完成跌倒检测,有效降低了硬件设施的成本;该检测方法能够对跌倒动态瞬时状态和跌倒后的静态持续状态进行检测,减少了误报、漏报的情况。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
图1是本申请跌倒检测系统一实施方式的结构示意图;
图2是图1中UWB定位系统10的部署结构示意图;
图3是本申请跌倒检测方法一实施方式的流程示意图;
图4是步骤S101对应的一实施方式的流程示意图;
图5是步骤S202对应的一实施方式的空间位置解析示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性的劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
请参阅图1,图1是本申请跌倒检测系统一实施方式的结构示意图。上述跌倒检测系统100包括:相互耦接的UWB定位系统10和处理器12,处理器12与UWB定位系统10在跌倒检测过程中相互配合。请参阅图2,图2是图1中UWB定位系统10的部署结构示意图。其中,UWB定位系统100包括两个锚点102和104,两个锚点102和104处于同一条铅垂线101上。通过上述实施方式,能够基于双锚点的UWB定位系统实现对目标的跌倒检测,在UWB定位系统中仅使用两个锚点,有效降低了硬件设施成本以及后期的维护成本。
具体地,上述处理器12还可以称为CPU(Central Processing Unit,中央处理单元)。处理器12可能是一种集成电路芯片,具有信号的处理能力。处理器12还可以是通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(ApplicationSpecific Integrated Circuit,ASIC)、现场可编程门阵列(Field-Programmable GateArray,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。另外,处理器12可以由多个集成电路芯片共同实现。
具体地,UWB(超宽带技术,Ultra Wide Band)是一种无线载波通信技术,它不采用正弦载波,而是利用纳米级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。UWB技术具有系统复杂性低,发射信号功率谱密度低,对信号衰落不敏感,截获能力低,定位精度高,其定位精度可达厘米级别等优点,尤其适合用于室内等密集场所的高速无线接入。在室内空间使用UWB定位系统10,需确定室内绝对坐标系,一般以室内地面长度方向为x轴,地面宽度方向为y轴,室内空间高度方向为z轴。上述UWB定位系统10仅需两个处于同一铅垂线101上的锚点102和104即可实现跌倒检测,其具体实现过程将在后续详细说明。
在本实施方式中,请参阅图2,上述UWB定位系统10还包括标签105,其中,标签105与目标103固定,且标签105能够以脉冲形式发送信号至两个锚点102和104。其中,UWB定位系统10使用锚点102和104与标签105相互配合以实现精准定位。固定设置于目标103上的标签105可以采用手环、胸牌的形式,当然在其他实施例中标签105也可以采用其他形式,只要能够向锚点102和104发送UWB脉冲信号即可。通过上述实施方式,能够获取目标103的高度信息,同时也为之后的跌倒检测提供高度信息。
在本实施方式中,请参阅图1,该跌倒检测系统100中还包括电源管理模块14,用于跌倒检测系统100中不同模块的用电情况并根据所检测到的用电情况分配相应的电源。通过上述实施方式,能够合理分配系统内部的电源,保障跌倒检测系统有效运行。
当然,在其他实施方式中,由于锚点是长供电设备,跌倒检测系统还可以包括加速度传感器、摄像头等其他硬件设施,与UWB定位系统相互配合,从而使跌倒检测系统能够实现更多的功能,此处不作具体限定。
在本实施方式中,请继续参阅图1,该跌倒检测系统100还包括无线通信模块16,与处理器12耦接,用于在处理器12触发报警后,上报目标103的位置信息。其中,无线通信模块16与上述处理器12集成于一个无线MCU模块18中,无线MCU模块18用于实现包括高度信息变化值的计算、触发报警、上报位置信息等功能。
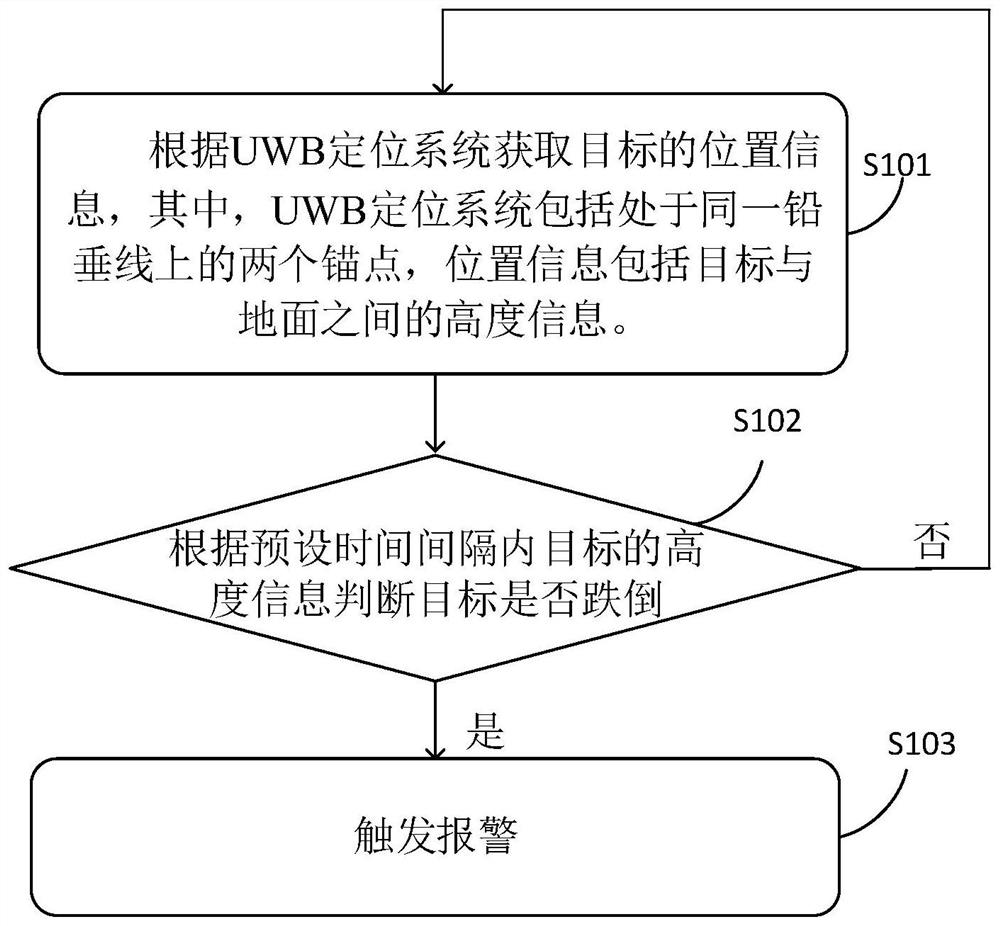
上述跌倒检测系统之间相互配合实现的跌倒检测方法具体请参阅图3,图3是本申请跌倒检测方法一实施方式的流程示意图,该检测方法包括:
S101:根据UWB定位系统获取目标的位置信息,其中,UWB定位系统包括处于同一铅垂线上的两个锚点,位置信息包括目标与地面之间的高度信息。
具体地,两个锚点处于同一条铅垂线上表示两个锚点的连线总是与z轴平行,换言之,两个锚点在空间内建立的绝对坐标系中的x轴和y轴的坐标值相等;目标与地面之间的高度信息表示绝对坐标系的z轴方向的坐标值。
S102:根据预设时间间隔内目标的高度信息判断目标是否跌倒。
在本实施方式中,步骤S102包括:获得第一预设时间间隔内目标的高度信息的变化值;判断变化值是否大于第一阈值。当第一时间间隔t
在另一实施方式中,步骤S102包括:判断在第二预设时间间隔内目标的高度信息是否一直小于第二阈值。当第二预设时间间隔t
S103:若是,则触发报警。
通过上述实施方式,基于双锚点的UWB定位系统能够实现对目标的位置区域追踪,便于医护人员根据提供的位置区域寻找到目标,从而及时开展救援工作,保障了目标的安全;利用单一的UWB定位系统的高度信息实现对目标的跌倒检测,有效降低了算法难度;定位系统中仅使用两个固定在同一铅垂线上的锚点完成定位,有效降低了硬件设施的成本;该检测方法能够对跌倒动态瞬时状态和跌倒后的静态持续状态进行检测,有效提高了定位精度,减少了误报、漏报的情况。
在本实施方式中,请参阅图4,图4是步骤S101对应的一实施方式的流程示意图。上述步骤S101包括:
S201:获得位于同一坐标系中两个锚点的坐标信息、以及标签与两个锚点之间的距离。
S202:利用两个锚点的坐标信息、距离、以及定位算法计算获得标签在坐标系中的坐标信息。
通过上述实施方式,利用UWB定位原理能够实现对目标的位置捉追踪,获取目标的位置信息,为后续依据高度方向的位置信息进行跌倒判断提供技术支持。
在本实施方式中,上述步骤S202中提及的定位算法包括ToF(飞行时间技术Timeof Flight)定位算法,当然在其他实施方式中,也可使用其它定位算法,只要能够获得标签对应的坐标信息,此处不作限定。通过上述方式,能够实现UWB定位系统的位置追踪功能,为后续的跌倒判断提供位置信息。
为便于理解,以ToF定位算法为例进行上述获得标签在坐标系中的的坐标信息过程的详细讲解。请参阅图2,在空间绝对坐标系下,锚点102的坐标为(x
(x-x
(x-x
由于x
请参阅图5,图5是步骤S202对应的一实施方式的空间位置解析示意图。分别以锚点102和锚点104为球心,以r
在本实施例中,在触发报警的步骤之后,还包括将目标的大致位置区域上报至平台。通过上述实施方式,能够在跌倒之后及时反馈目标的位置区域,缩小查找范围,便于医护人员及时找到目标伤员并展开救援工作,进一步保障目标的安全。
总而言之,区别于现有技术的情况,本申请中提供一种跌倒检测系统及方法,根据UWB定位系统获取目标的位置信息,其中,所述UWB定位系统包括处于同一铅垂线上的两个锚点,所述位置信息包括所述目标与地面之间的高度信息;根据预设时间间隔内所述目标的所述高度信息判断所述目标是否跌倒;若是,则触发报警。通过上述实施方式,基于双锚点的UWB定位系统能够实现对目标的位置追踪,便于医护人员根据提供的位置信息寻找到目标,从而及时开展救援工作,保障了目标的安全;利用单一的UWB定位系统的高度信息实现对目标的跌倒检测,有效降低了算法难度;定位系统中仅使用两个固定在同一铅垂线上的锚点完成跌倒检测,有效降低了硬件设施的成本;该检测方法能够对跌倒动态瞬时状态和跌倒后的静态持续状态进行检测,有效提高了定位精度,减少了误报、漏报的情况。
以上所述仅为本申请的实施方式,并非因此限制本申请的专利范围,凡是利用本申请说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本申请的专利保护范围内。
- 人体跌倒检测方法、防跌倒机器人及防跌倒系统
- 一种跌倒检测系统及其基于深度图像的跌倒检测方法