一种小位移量预推力机构
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及机械测量技术领域,具体涉及一种小位移量预推力机构。
背景技术
目前,手机摄像头外围设置有金属片和玻璃镜片,金属和玻璃镜片进行组装后,需要对组装后的产品进行牢固性和位移量检测。传统的检测方式是通过人工逐一在检测机上进行检测,检测效率低;而且产品的体积较小,在测试过程中需要施加5000±30g的力,控制位移量为0.02mm,预推力不可以过力,也不可能超过规定位移量,对人员的要求较高,人工检测存在较大的误差。
现在的产品位移量检测作业中,已普遍使用传感器辅助产品检测,可解决人工检测误差大的问题。现有技术中,直线电机的精度为±0.005mm,滑动装置的精度为±0.02mm,压力传感器0.001mm的位移量对应的压力为17g。现有的压力传感器虽然精度较高但是位移量小,无法满足应用。同时,装置在检测过程中,执行单元之间相互切换周期较长,短时间内无法实现数据测量。同时,推力控制精度不到位,容易破坏产品。
因此,开发一种能够解决高精度压力传感器位移量小、测量精度低的固定更好、精度更高的小位移量预推力机构,以进一步提高作业良率,显然具有实际的现实意义。
发明内容
本发明的目的是提供一种小位移量预推力机构。
为达到上述目的,本发明采用的技术方案是:一种小位移量预推力机构,包括驱动组件、测量装置、产品固定组件和移动装置;
所述移动装置包括X轴移动装置、设置在X轴移动装置上的推块、Z轴移动装置和设置在Z轴移动装置上的反推块;
所述推块上设置有第一斜面,所述反推块上设置有与第一斜面相接触的第二斜面;
所述Z轴移动装置上设置有压力传感器;
所述产品固定组件设置在所述Z轴移动装置与所述测量装置之间;
所述测量装置包括测量探针,所述测量探针的底部设置有用于监测产品位移数据的探头。
优选地,所述驱动组件包括停止气缸和直线电机;所述停止气缸11上设置有控制响应速度的电磁阀;所述电磁阀具有延迟。
优选地,所述停止气缸位于所述X轴移动装置的上方,所述直线电机位于所述停止气缸的上方。
优选地,所述产品固定组件上放置有第一产品和第二产品,所述产品固定组件包括侧压板和顶推块,所述侧压板用于固定所述第一产品,所述顶推块用于将第二产品推至与第一产品相接触。
优选地,所述Z轴移动装置上设置有滑轨,所述滑轨上设置有第一滑块、设置在第一滑块上的第一支撑板、第二滑块和设置在第二滑块上的第二支撑板。
优选地,所述第一滑块位于所述第二滑块的上方,所述第一支撑板包括第一横向支撑板和第一竖向支撑板,所述第二支撑板包括第二横向支撑板和第二竖向支撑板,所述第一竖向支撑板和第二竖向支撑板之间可拆卸连接。
优选地,所述压力传感器设置在所述第一支撑板和所述第二支撑板之间;
所述反推块设置在所述第二支撑板的下方;
所述产品固定组件设置在所述第一支撑板的上方。
优选地,所述压力传感器的高度与所述第一横向支撑板和所述第二横向支撑板之间的距离相等。
优选地,所述压力传感器为S型压力传感器。
优选地,所述第一斜面与水平面的夹角的角度为10°~80°。
优选地,所述推块上远离第一斜面的一端设置有缓冲弹簧,所述驱动组件用于驱动所述缓冲弹簧横向移动。
优选地,所述测量装置的下方设置有大理石基准板,所述大理石基准板上设置有供测量探针穿过的孔。
优选地,所述测量装置还包括用于连接测量探针的支架,所述测量探针内部设置有滑动装置,所述支架上固定连接有驱动测量探针滑动的电机。
上文中,所述电机控制所述测量探针的下落速度和下落时间。
优选地,还包括控制系统,所述控制系统用于控制测量装置和驱动组件、存储测量装置测量到的数据、控制驱动过程中执行单元相互切换周期。
所述控制系统包括补偿系统、控制单元和存储单元;所述补偿系统包括速度补偿模块;所述速度补偿模块用于控制直线电机的速度波动和控制停止气缸的停止精度,从而控制性能。
上文中,所述压力传感器的竖向位移量增加,原理是:所述驱动组件驱动缓冲弹簧横向运动,缓冲弹簧带动X轴移动装置上的推块进行滑动,推块横向滑动带动Z轴移动装置上的反推块滑动,由于推块上设置有第一斜面,反推块上设置有第二斜面,第一斜面与第二斜面相互接触,当推块进行横向滑动时,反推块纵向滑动,所述反推块纵向滑动时带动第二支撑板、第一支撑板和压力传感器向上运动。
由于上述技术方案运用,本发明与现有技术相比具有下列优点:
1.本发明公开的小位移量预推力机构通过推块和反推块之间的相互运动,增加了竖向位移,解决了高精度压力传感器位移量小无法满足应用的问题;通过在测量探针上设置滑动装置实现测量探针的自动下落及测量,很大程度上缩短了检测时间,提高了测量效率;
2.本发明所述测量装置能够实现实时测量,测量流程操作简单方便,同时保证较高的稳定性及可靠性,测量探针随电机下落速度可调整,解决了测量探针升降运动的不可控性,保证了测量精度;
3.本发明所述压力传感器的种类和型号不受限制,兼容性强;
4.本发明的控制系统采用补偿系统提高驱动组件的精度,采用高速电磁阀缩短驱动过程中执行单元相互切换周期,以及测量停止时驱动组件精度,从而实现对装置的精准控制。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的一些附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
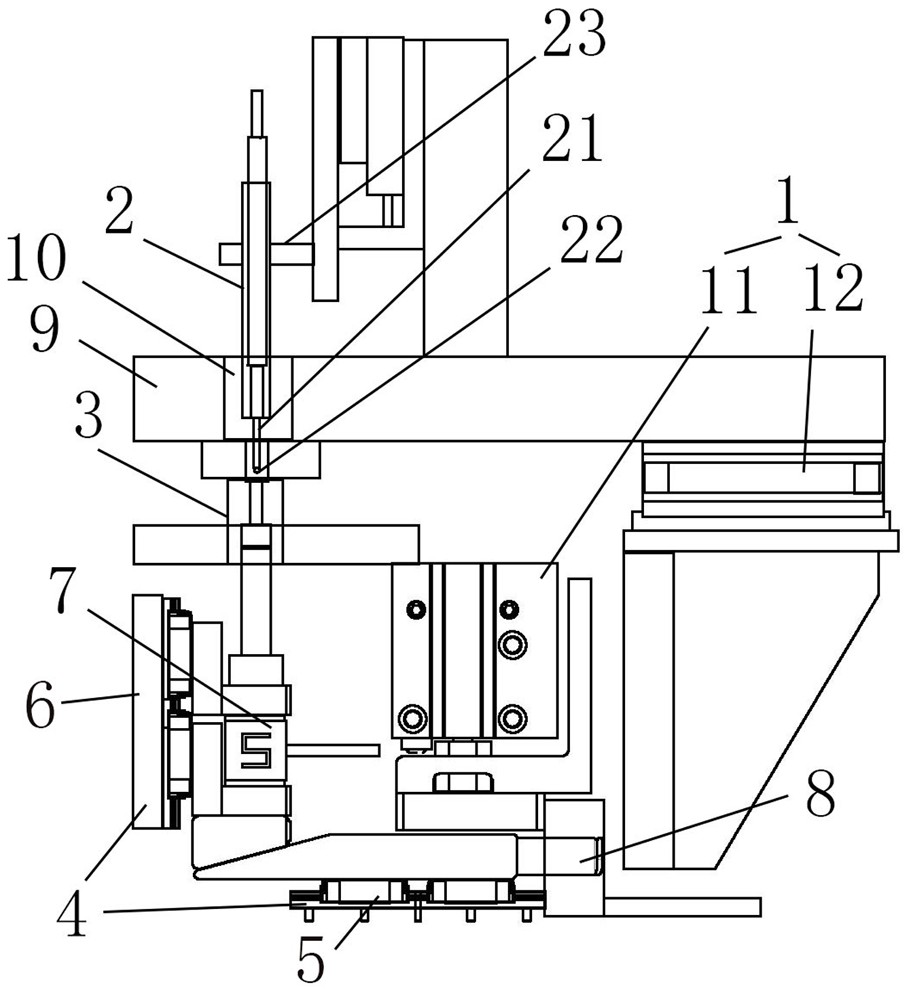
图1为本发明实施例一的平面图;
图2为本发明实施例一中预推机构的立体图。
其中,1、驱动组件;2、测量装置;3、产品固定组件;4、移动装置;5、X轴移动装置;6、Z轴移动装置;7、压力传感器;8、缓冲弹簧;9、大理石基准板;10、孔;
11、停止气缸;12、直线电机;
21、测量探针;22、探头;23;支架;
31、顶推块;
51、推块;511、第一斜面;
61、反推块;611、第二斜面;62、滑轨;63、第一滑块;64、第一支撑板;65、第二滑块;66、第二支撑板。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
参见图1和图2,一种小位移量预推力机构,包括驱动组件1、测量装置2、产品固定组件3和移动装置4;
所述移动装置4包括X轴移动装置5、设置在X轴移动装置5上的推块51、Z轴移动装置6和设置在Z轴移动装置6上的反推块61;
所述推块51上设置有第一斜面511,所述反推块61上设置有与第一斜面511相接触的第二斜面611;
所述Z轴移动装置61上设置有压力传感器7;
所述产品固定组件3设置在所述Z轴移动装置6与所述测量装置2之间;
所述测量装置2包括测量探针21,所述测量探针21的底部设置有用于监测产品位移数据的探头22。
进一步的,所述驱动组件1包括停止气缸11和直线电机12;所述停止气缸11上设置有控制响应速度的电磁阀。
进一步的,所述电磁阀具有延迟,所述电磁阀的延迟速度为10ms。
进一步的,所述停止气缸11位于所述X轴移动装置5的上方,所述直线电机12位于所述停止气缸11的上方。
进一步的,所述产品固定组件3上放置有第一产品和第二产品,所述产品固定组件3包括侧压板和顶推块31,所述侧压板用于固定所述第一产品,所述顶推块31用于将第二产品推至与第一产品相接触。
进一步的,所述产品固定组件3的功能是固定第一产品,推动第二产品位移至与第一产品接触。将所述第一产品放置在侧压板上进行固定,将所述第二产品放置在顶推块31上,当装置进行驱动时,顶推块31推动第二产品向上运动。
进一步的,所述Z轴移动装置6上设置有滑轨62,所述滑轨62上设置有第一滑块63、设置在第一滑块63上的第一支撑板64、第二滑块65和设置在第二滑块65上的第二支撑板66。
进一步的,所述第一滑块63位于所述第二滑块65的上方,所述第一支撑板64包括第一横向支撑板和第一竖向支撑板,所述第二支撑板66包括第二横向支撑板和第二竖向支撑板,所述第一竖向支撑板和第二竖向支撑板之间可拆卸连接。
进一步的,所述压力传感器7设置在所述第一支撑板64和所述第二支撑板66之间;
所述反推块61设置在所述第二支撑板66的下方;
所述产品固定组件3设置在所述第一支撑板64的上方。
进一步的,所述压力传感器7的高度与所述第一横向支撑板和所述第二横向支撑板之间的距离相等。
进一步的,所述压力传感器7为S型压力传感器。
进一步的,所述第一斜面511与水平面的夹角的角度为10°~80°。
进一步的,所述推块51上远离第一斜面511的一端设置有缓冲弹簧8,所述驱动组件1用于驱动所述缓冲弹簧8横向移动。
进一步的,所述测量装置2的下方设置有大理石基准板9,所述大理石基准板9上设置有供测量探针21穿过的孔10。
进一步的,所述测量装置2还包括用于连接测量探针21的支架23,所述测量探针21内部设置有滑动装置,所述支架23上固定连接有驱动所述测量探针21滑动的电机。
上文中,所述电机控制所述测量探针21的下落速度和下落时间。
进一步的,还包括控制系统,所述控制系统用于控制测量装置2和驱动组件1、存储测量装置2测量到的数据、控制驱动过程中执行单元相互切换。
进一步的,所述控制系统包括补偿系统、控制单元和存储单元;所述补偿系统包括速度补偿模块;所述速度补偿模块用于控制直线电机的速度波动和控制停止气缸,从而控制性能;所述控制单元实时监测各模块的运动,当系统故障时及时报警。
进一步的,所述压力传感器7的竖向位移量增加,原理是:所述驱动组件1驱动缓冲弹簧8横向运动,缓冲弹簧8带动X轴移动装置5上的推块51进行滑动,推块51横向滑动带动Z轴移动装置6上的反推块61滑动,由于推块51上设置有第一斜面511,反推块61上设置有第二斜面611,第一斜面511与第二斜面611相互接触,当推块51进行横向滑动时,反推块61纵向滑动,所述反推块61纵向滑动时带动第二支撑板66、第一支撑板64和压力传感器7向上运动。
所述小位移量预推力机构的工作步骤包括:
S1、将第一产品固定在所述侧压板上,将第二产品放置在顶推块31上;
S2、测量装置2中的测量探针21向下运动穿过大理石基准板9上的孔10,探头22运动至第一产品上,探头22接触第一产品并将信息反馈至控制系统;
S3、驱动组件1驱动缓冲弹簧8带动推块51横向运动;
S4、推块51与反推块61相互作用,反推块61纵向滑动;
S5、压力传感器7感应到力的作用传输信号至控制系统中的存储单元中;
S6、第一支撑板64上的顶推块31推动第二产品向上运动;
S7、停止气缸11搭配控制阀快速停止推块51和反推块61运动;
S8、测量探针21上的探头22感应第二产品的位移;
S9、探头22感应到的数据传输至控制系统中的存储单元进行存储和记录;
S10、测量完毕,所有组件回归原位。
进一步的,当所述测量探针21上的探头22运动至第一产品上后,所述控制系统才驱动所述驱动组件进行运动。
实施例二
本实施例所述小位移量预推力机构用于对第一产品:金属片、第二产品:玻璃片之间的位移进行测量。
本实施例是在上述实施例的基础上进行的,与上述实施例相同之处不予赘述。
本实施例中所述直线电机12的精度为±0.005mm,所述X轴移动装置5和所述Z轴移动装置6的精度为±0.02mm,所述压力传感器7在0.001mm的位移量中对应的压力为17g。
进一步的,所述推块51上的第一斜面511与水平面形成的夹角为15°,所述反推块61上的第二斜面611与水平面形成的夹角为75°。
首先将装置中的反推块61去除,所述直线电机12推动缓冲弹簧8横向移动,所述缓冲弹簧8带动推块51横向移动的距离为L1,所述压力传感器7竖向移动的距离为L2,所述L1:L2=3.7:1。
然后将反推块61放置在推块51上,所述直线电机12推动缓冲弹簧8横向移动,所述缓冲弹簧8带动推块51横向移动,所述推块51与反推块61相互作用,所述反推块61纵向移动,且所述反推块61纵向移动的距离L3与L1大小相等,所述压力传感器7竖向移动的距离为L4,所述L4与L3相等,即L4:L2=3.7:1。
从上文中可以看出,加入了所述反推块61,使其与所述推块51进行相互作用后,压力传感器7的纵向位移量放大了3.7倍,解决了压力传感器7位移量小,无法满足应用的问题。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种小位移量预推力机构
- 一种小位移量预推力机构