一种光学系统倍率色差的测量方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于光学检测技术领域,具体涉及一种光学系统倍率色差的测量方法。
背景技术
透射式光学系统由于材料的色散特性使其自身具有色差,色差分为位置色差和倍率色差两种。对于工作在宽波段的光学系统来来说,色差是影响其成像质量的重要因素,因此检测光学系统色差对于评估实际系统的性能非常重要。传统的色差评价是通过测量几个波长的相关光学参数进行对比,如测量位置色差时,通过测量不同波长的焦点位置得到位置色差。由于光源的限制,常规的方法得到的结果仅仅是几个测量波长之间的色差,不能全面的评价系统性能。
专利201910728724.0提出了利用后截距与波长的函数关系,通过几个波长的后截距数据计算出一定范围内连续波长的位置色差,即只需要测量几个波长的焦点位置就能得到系统在较大波段范围内的位置色差,但该专利仅能够解决位置色差的测量,并且位置色差仅是轴上像差,而倍率色差不仅与波长有关,还受到系统视场的影响。
在一些重要应用中,如星敏感器的倍率色差对于实际使用中的影响非常大,专利201510508308.1和202010404600.X为了解决星敏感器倍率色差的测量问题,提供了相关倍率色差的测量方案,但其结果也仅为几个特定波长之间的倍率色差,而无法做到测量连续视场以及测试波长以外的倍率色差,这会导致对评价光学系统的性能的不全面。
发明内容
为解决上述问题,提供一种光学系统倍率色差的测量方法,本发明采用了如下技术方案:
本发明提供了一种光学系统倍率色差的测量方法,用于检测待测光学系统的倍率色差,其特征在于,包括以下步骤:步骤S1,使用4种波长分别为λ
中,计算得到A
本发明提供了一种光学系统倍率色差的测量方法,用于检测待测光学系统的倍率色差,其特征在于,包括以下步骤:步骤T1,使用4种波长分别为λ
中,计算得到A
本发明提供的光学系统倍率色差的测量方法,还可以具有这样的特征,其中,指定波长λ
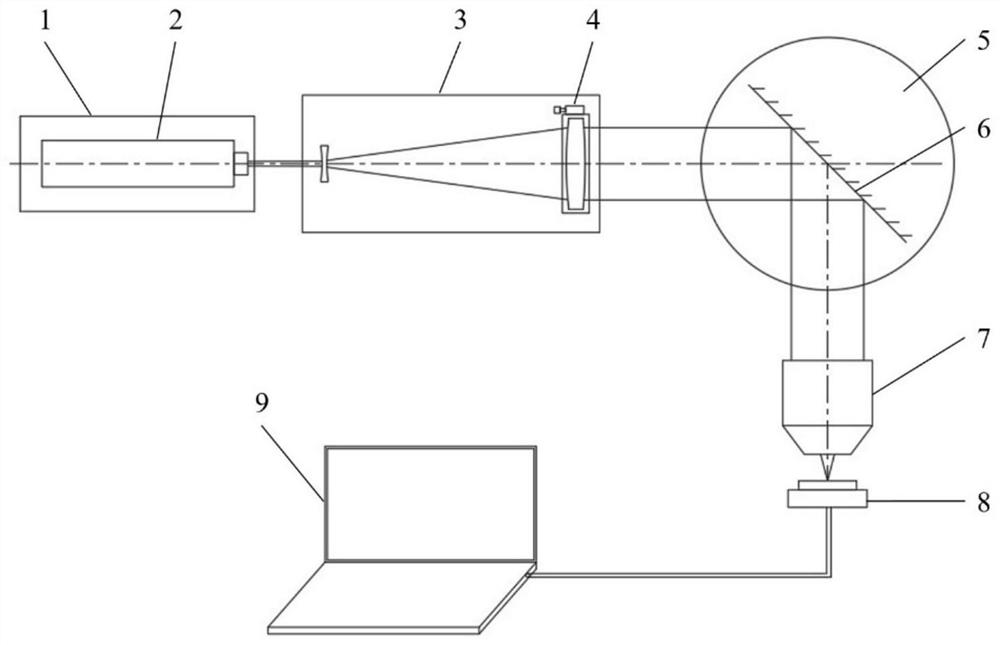
本发明提供的光学系统倍率色差的测量方法,还可以具有这样的特征,其中,通过倍率色差测量装置测量被测光学系统在一定的入射角度下的视场的成像点位置,倍率色差测量装置包括四维调整平台、激光器、扩束系统、Z轴位移机构、旋转平台、平面反射镜、CCD探测器以及计算机,激光器固定在四维调整平台上,用于发射光束,四维调整平台用于使得光束向水平方向以及竖直方向位移或旋转,扩束系统设置在光束的光路中,用于将光束的直径扩大并输出平行光,Z轴位移机构设置在扩束系统的输出端,用于使不同波长的光束形成准直度较好的平行光,平面反射镜固定在旋转平台上,用于将平行光进行反射至待测光学系统上,旋转平台用于改变反射的平行光的角度,平行光经过待测光学系统并由CCD探测器进行探测成像,并由与CCD探测器相连接的计算机进行测量获得成像位置。
本发明提供的光学系统倍率色差的测量方法,还可以具有这样的特征,其中,多项式公式为:y
本发明提供的光学系统倍率色差的测量方法,还可以具有这样的特征,其中,当待测光学系统为单色系统时,公式(1)中,D
本发明提供的光学系统倍率色差的测量方法,还可以具有这样的特征,其中,成像位置为待测光学系统的成像的质心。
发明作用与效果
根据本发明的一种光学系统倍率色差的测量方法,用于检测光学系统的倍率色差,步骤为使用4种波长平行光测量光学系统在不同视场的对应的成像位置,然后使用4种波长成像位置通过ACF公式计算不同测量视场下成像位置与波长的曲线,然后选取要计算倍率色差的波长通过成像位置与波长的曲线计算出不同测量视场下对应的成像位置,将计算出的不同测量视场对应波长成像位置通过多项式拟合得到对应波长成像位置与视场的曲线,从而得到任意波长之间的倍率色差曲线。单个视场的倍率色差在很大程度上是由对应视场的位置色差(或焦距变化所引起的)所引起的,因此本发明采用ACF公式计算计算单个视场的不同波长之间的偏移量,再用多项式拟合不同视场所需要计算波长的倍率色差之间(相当于结果将位置色差与视场结合在一起进行测量)。在实际测量中测量不同角度的少量数据相对容易,但测量一个连续波段中的大量数据很难,而本发明的方法可以通过测量少量波长的不同视场的数据,得到一定波段范围内任意波长连续视场的倍率色差曲线,对于检测光学系统的倍率色差有重要意义。
附图说明
图1是本发明实施例一的倍率色差测量装置示意图;
图2是本发明实施例一的待测光学系统的结构示意图;
图3是本发明实施例一的待测光学系统倍率色差的第一种定义的仿真结果图;
图4是本发明实施例一的待测光学系统倍率色差的第二种定义的仿真结果图;
图5是本发明实施例一的单个视场倍率色差与焦距、位置色差之间关系的示意图;
图6是本发明实施例一的0.1视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图7是本发明实施例一的0.2视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图8是本发明实施例一的0.3视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图9是本发明实施例一的0.4视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图10是本发明实施例一的0.5视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图11是本发明实施例一的0.6视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图12是本发明实施例一的0.7视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图13是本发明实施例一的0.8视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图14是本发明实施例一的0.9视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图15是本发明实施例一的1视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图;
图16是本发明实施例一的使用多项式拟合的0~1视场的最长波长与最短波长之间的倍率色差曲线;
图17是本发明实施例二的使用多项式拟合0~1视场的选定波长与指定波长之间的倍率色差曲线。
具体实施方式
以下结合附图以及实施例来说明本发明的具体实施方式。
<实施例一>
本实施例提供一种光学系统倍率色差的测量方法,用于测量待测光学系统的倍率色差。本实施例一中,待测光学系统为大视场光学系统。
图1是本发明实施例一的倍率色差测量装置示意图。
本实施例中,倍率色差测量装置100用于测量待测光学系统的倍率色差,如图1所示,倍率色差测量装置100包括四维调整平台1、激光器2、扩束系统3、Z轴位移机构4、高精度旋转平台5、平面反射镜6、CCD探测器8以及计算机9。
本实施例中,X方向为第一水平方向,Y方向分别为竖直方向,Z方向为与X方向相垂直的第二水平方向。
激光器2固定在四维调整平台1上并发射光束,四维调整平台1可使得激光器2,即由激光器2发射的平行光沿X方向位移、沿X方向旋转、沿Y方向位移以及沿Y方向旋转。
扩束系统3设置在激光器2发射的光束的光路中,用于扩大输入的光束的直径,并调整光束的准直度,以产生较大口径的平行光输出,本实施例中,扩束系统3为伽利略望远系统,由一个负光焦度镜头和一个正光焦度镜头组成。
Z轴位移机构4设置在扩束系统3的输出端部,通过调整Z轴位移机构4调整扩束系统3中的正光焦度镜头位置使不同波长的光束形成准直度较好的平行光。
平面反射镜6固定在可转动的高精度旋转平台5上,并设置在扩束系统3输出的平行光的光路中,用于将该平行光反射到被测光学系统中。
本实施例中,CCD探测器8为大尺寸CCD探测器,与计算机9相连接。
待测光学系统7设置在平面反射镜6反射的平行光的光路中,平面反射镜6通过高精度旋转平台5旋转使得该平行光改变角度,即改变待测光学系统7的入射角的角度。该平行光通过待测光学系统7形成待测光由CCD探测器8进行探测成像位置,并由具有处理软件的计算机9进行处理以及测量。
图2是本发明实施例一的待测光学系统的结构示意图。
如图2所示,待测光学系统7为大视场角镜头,待测光学系统7的最大视场为87.5°,0°视场不会产生成像位置高度的差异。
图3是本发明实施例一的待测光学系统倍率色差的第一种定义的仿真结果图,图4是本发明实施例一的待测光学系统倍率色差的第二种定义的仿真结果图。
在光学设计的定义中,倍率色差有两种表达方式,如图3所示,倍率色差的第一种定义为波段范围内最长波长与最短波长在不同视场下的成像位置的高度差异;如图4所示,倍率色差的第二种定义为所有波长相对一个指定波长(一般为主波长或中心波长)在不同视场下的成像位置的高度差异。
本实施例中,光学设计软件(Zemax)使用第一种倍率色差的表达方式,即设定波段范围内最长波长与最短波长在不同视场下的成像位置的高度差异。
本实施例使用倍率色差测量装置100测量待测光学系统7的倍率色差的测量方法包括以下步骤:
步骤S1,使用4种波长为λ
具体地,本实施例中,λ
本实施例中,将视场归一化,即1视场为87.5°(最大视场),0.1视场为8.75°,0.2视场为17.5°,以此类推。
分别使用560nm、620nm、680nm、720nm波长激光器2在0.1视场下测量待测光学系统7在CCD的成像位置,本实施例中,成像位置为待测光学系统7的成像在Y方向上的质心坐标,成像高度即竖直方向上的质心的高度。
计算机9记录并计算4种波长的成像位置,最终得到0.1视场的4种波长的成像高度,分别为h
本实施例中,在更换激光器2时通过调整四维调整平台1进行平行光光路的快速对准,并通过调整Z轴位移机构4调整扩束系统3中的正光焦度镜头使每种波长的光束形成准直度较好的准直光。
步骤S2,将步骤S1中得到的4个成像点位置分别代入公式:
中,计算得到A
图5是本发明实施例一的单个视场倍率色差与焦距、位置色差之间关系的示意图。
如图5所示,倍率色差本质上是由位置色差引起的,位置色差是光学系统在轴上方向不同波长焦点位置之间的差异。轴外视场的成像高度由光写系统的焦距所决定,以ftanω成像为例,在相同视场角下,焦距随波长的变化导致不同波长的成像高度产生差异,同时不同波长焦点也不能聚焦在同一成像面上,因此反映到同一角度视场下,不同波长的聚焦位置表现为成像高度不一样,并且弥散斑的大小也不同,所以在同一成像面应用弥散斑的质心确定不同波长的高度位置。由于焦距随波长的变化可以使用复消色差特性公式(ACF公式),即(1)表示,而倍率色差本质上是由焦距的变化所引起的,所以在同一角度视场,不同波长的成像位置也可以使用ACF公式表示。
图6是本发明实施例一的0.1视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图。
本实施例中,即通过公式(1)计算0.1视场下的A
步骤S3,改变平行光的入射角度,选取n个不同的入射角度下的视场,重复步骤S1~步骤S2,计算4种波长为λ
具体地,通过调整高精度旋转平台5使平面反射镜6旋转进而改变入射角,本实施例中,n=11,即选取的待测光学系统的视场分别为0、0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8、0.9和1视场(其中0°视场没有倍率色差,按0计算),分别按照步骤S1~步骤S2的过程测量4种波长为λ
图7是本发明实施例一的0.2视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图8是本发明实施例一的0.3视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图9是本发明实施例一的0.4视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图10是本发明实施例一的0.5视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图11是本发明实施例一的0.6视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图12是本发明实施例一的0.7视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图13是本发明实施例一的0.8视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图14是本发明实施例一的0.9视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图,图15是本发明实施例一的1视场的计算得到的视场成像高度-波长曲线与计算机采集的仿真曲线对比图。
如图7~图15所示,0.2视场、0.3视场、0.4视场、0.5视场、0.6视场、0.7视场、0.8视场、0.9视场以及1视场与0.1视场相同,其视场成像高度-波长曲线与计算机采集的仿真曲线基本一致,即可以证明使用公式(1),即ACF公式计算的成像高度-波长曲线是可行的,且结果较为精确。
步骤S4,选取所要测量的倍率色差对应的波长λ
具体地,本实施例中,即按照倍率色差的第一种定义,通过
本实施例中,λ
步骤S5,分别将不同的视场下的h
具体地,本实施例中,即将步骤S4中得到的0~1视场(0视场的差异为0)共11个视场的成像高度的差异通过多项式公式拟合得到波长λ
本实施例中,多项式公式为y
步骤S6,根据y(λ
具体地,本实施例中,即得到0~1连续视场的倍率色差曲线。
图16是本发明实施例一的使用多项式拟合的0~1视场的最长波长与最短波长之间的倍率色差曲线,即480nm~640nm的波长范围中的成像高度偏差随视场的变化曲线。
如图16所示,本实施例的光学系统倍率色差的测量方法得到的倍率色差曲线与图3的由计算机得到的仿真曲线的数值以及形状均一致(坐标相反,数值和形状都一致),曲线非常接近,证明了本实施例测量得到的倍率色差具有较高的精确性。
实施例作用与效果
本实施例一提供一种光学系统倍率色差的测量方法,用于检测光学系统的倍率色差,步骤为使用4种波长平行光测量光学系统在不同视场的对应的成像位置,然后使用4种波长成像位置通过ACF公式计算不同测量视场下成像位置与波长的曲线,然后选取要计算倍率色差的波长通过成像位置与波长的曲线计算出不同测量视场下对应的成像位置,将计算出的不同测量视场对应波长成像位置通过多项式拟合得到对应波长成像位置与视场的曲线,从而得到任意波长之间的倍率色差曲线。单个视场的倍率色差在很大程度上是由对应视场的位置色差(或焦距变化所引起的)所引起的,因此本方案采用ACF公式计算计算单个视场的不同波长之间的偏移量,再用多项式拟合不同视场所需要计算波长的倍率色差(相当于结果将位置色差与视场结合在一起进行测量)。在实际测量中测量不同角度的数据相对容易,但测量一个连续波段中的大量数据很难,而本实施例的方法可以通过测量少量波长的不同视场的数据,得到一定波段范围内任意波长连续视场的倍率色差曲线,对于检测光学系统的倍率色差有重要意义。
进一步,本实施例一提供的光学系统倍率色差的测量方法中使用了包括四维调整平台、激光器、扩束系统、Z轴位移机构、旋转平台、平面反射镜、CCD探测器以及计算机的倍率色差测量装置,相较于现有技术中的倍率色差测量装置的准直性以及单色性较差,本实施例的倍率色差测量装置使用激光器扩束系统以及Z轴位移机构使得准直度提升,从而获得较好的测量精度。
<实施例二>
本实施例二提供一种光学系统倍率色差的测量方法,与实施例一的光学系统倍率色差的测量方法的步骤S1~步骤S3的过程以及倍率色差测量装置均相同,不同点在于本实施例二的倍率色差使用第二种定义,即所有波长相对一个指定波长(一般为主波长或中心波长)在不同视场下的成像位置的高度差异。
具体地,本实施例二的光学系统倍率色差的测量方法包括如下步骤:
步骤T1,使用4种波长为λ
步骤T2,将步骤S1中得到的4个成像点位置分别代入公式:
中,计算得到A
步骤T3,改变平行光的入射角度,选取n个不同的入射角度下的视场,重复步骤S1~步骤S2,计算4种波长为λ
步骤T1~步骤T3与实施例一中的步骤S1~步骤S3相同。
步骤T4,选取波长范围λ
步骤T5,分别将不同的视场下的h
步骤T6,计算
步骤T7,分别将不同的视场下的h
步骤T8,根据待测光学系统的波长范围λ
图17是本发明实施例二的使用多项式拟合0~1视场的选定波长与指定波长之间的倍率色差曲线。
本实施例中,以得到多个选定波长分别为λ
图17即为本实施例二的测量方法得到多个波长的倍率色差曲线,即多个波长相对于指定波长的偏移量随视场变化的曲线,如图17所示,曲线21为波长为480nm的倍率色差曲线;曲线22为波长为640nm的倍率色差曲线;曲线23为波长为515nm的倍率色差曲线;曲线24为波长为590nm的倍率色差曲线。
由图17以及图4所示,本实施例二的方法得到的多个波长倍率色差曲线与图4的待测光学系统倍率色差的第二种定义的计算机得到的仿真结果图中的各个曲线基本一致,说明了本实施例二的测量方法对于第二种定义的倍率色差也具有较高的精确性。
本实施例二中采用了与实施例一不同的对于倍率色差的定义,即本实施例二的光学系统倍率色差的测量方法可以同时得到一个波段内的波长相对于指定波长的倍率色差,使得本发明的光学系统倍率色差的测量方法的应用更为广泛。
上述实施例仅用于举例说明本发明的具体实施方式,而本发明不限于上述实施例的描述范围。
上述实施例中,拟合用多项式公式为4项多项式,即y
上述实施例中,使用了11个视场的数据点进行拟合,在其他实施例中,可以根据实际情况以及需要的精度取用不同个数的视场的实验数据进行拟合,选择的视场个数越多,精度越高。
上述实施例中,光学系统倍率色差的测量方法中将不同波长的成像位置带入ACF公式,即公式(1)进行计算,在其他实施例中,ACF公式中的X
- 一种光学系统倍率色差的测量方法
- 一种基于角度测量星敏感器光学系统倍率色差的方法