用于惯性导航系统装置中陀螺仪零偏参数测试装置及方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于陀螺仪测试技术领域,特别涉及一种惯性导航系统装置中陀螺仪的零偏参数测试方法。
背景技术
陀螺仪也称为角速度计,通常用于检测角速度和旋转角度。陀螺仪一般可分为传统的机械陀螺仪,复杂的光纤陀螺仪,激光陀螺仪和微机械陀螺仪。传统的机械陀螺仪,复杂的光纤陀螺仪和激光陀螺仪已广泛应用于航空,航天和其他军事领域的导航,制导和系统控制工作。微型机械陀螺仪因其具有易于小型化,低成本的特点,因此被广泛应用于消费电子领域的姿态捕捉、装置导航等工作中。
对于应用陀螺仪的惯性导航系统装置而言,陀螺仪通常在其出厂前进行测试,测试合格后安装到惯性导航系统装置中。但惯性导航系统装置在的组装和应用过程中,由于整机安装、系统供电、整机电磁干扰等因素,例如陀螺仪安装过紧,陀螺仪内部结构发生形变,致使陀螺仪性能出现偏差。应用陀螺仪的惯性导航系统需要经过温补和标定环节后才能投入使用,如果在使用中发现陀螺仪性不能满足惯性导航系统精度要求,需更换陀螺仪。
传统的陀螺仪性能评定试验需要投入大量的人力和时间资源,在对陀螺仪温度特性、零偏、标度等性能的评定过程中需要人员全程陪同、多次重复试验、频繁操作实验仪器和设备、对大量数据进行后处理,最终得到陀螺仪相应的性能指标。在陀螺仪数量较多、生产周期短时,这一过程严重影响装置开发生产进度。
发明内容
本发明需解决的技术问题是提供一种操作方便,具有良好重复性的用于惯性导航系统装置中陀螺仪零偏参数测试装置及方法。
为解决上述技术问题,本发明提供了一种用于惯性导航系统装置中陀螺仪零偏参数测试装置,采取技术方案如下:
所述陀螺仪零偏参数测试装置包括数据采集板、台钳工装、上位机和供电锂电池;所述台钳工装用以固定惯性导航系统装置;所述上位机的输出端与数据采集板相连接,用于向所述采集控制板发出控制信号;所述数据采集板采集惯性导航系统装置中陀螺仪角速度敏感量的数字量化结果,并将该敏感量数据信息传送至上位机进行计算和保存;所述供电电源与数据采集板和惯性导航系统装置相连接并进行供电。
进一步地,所述上位机包括采集控制和显示模块、数据采集和存储模块和上位机硬盘模块;
所述上位机采集控制和显示模块对所述采集控制板发送命令,设置采样时长、数据抽取率和数据包名称;所述采集控制板对惯性导航系统装置在设置采样时长内的全部采集数据进行收取,并依据数据抽取率对收取数据进行抽样和数据打包,并上传数据包;所述上位机数据采集和存储模块对采集控制板上传打包数据进行接收,按照数据包名称存储在所述上位机硬盘模块;所述上位机对上位机硬盘模块上位机内存储测量结果进行分析,获得惯性导航系统装置中陀螺仪的零偏参数。
基于上述用于惯性导航系统装置中陀螺仪零偏参数测试装置,本发明提供了一种用于惯性导航系统装置中陀螺仪的零偏参数测试方法,包括如下步骤:
步骤1、完成惯性导航系统装置、数据采集板、供电锂电池、台钳工装和上位机的安装连接;
步骤2、轮流将装有惯性导航系统装置的台钳工装平放平面、竖立平面、横立平面与地球重力轴方向垂直放置,并通过上位机设置数据采集板的数据抽取率和样本采集时长,获取数据样本并计算获得陀螺仪的俯仰轴运行偏置稳定性参数IRBS
步骤3、轮流将装有惯性导航系统装置的台钳工装平放平面、竖立平面、横立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率和样本采集时长,获取数据样本并计算获得陀螺仪的俯仰轴角度随机游走噪声参数ARW
步骤4、轮流将装有惯性导航系统装置的台钳工装竖立平面、竖立平面、横立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率和样本采集个数,获取数据样本并计算获得陀螺仪的俯仰轴噪声功率密度谱RND
步骤5、判断惯性导航系统装置中陀螺仪是否满足惯性导航系统精度要求,即判断通过上述步骤2~4获得的陀螺仪俯仰轴、滚动轴、航向轴运行偏置稳定性参数、角度随机游走噪声参数、噪声功率密度谱测量结果是否满足陀螺仪出厂前对应指标测试结果的指标要求。
优选地,
所述步骤2数据抽取率为2SPS,样本采集时长不低于1800s。
所述步骤3数据抽取率为10SPS,样本采集时长不低于30s。
所述步骤4数据抽取率按照所测陀螺仪标称数据输出速率进行采样,获得数据样本不低于320000个。
进一步地,所述步骤2中轴向运行偏置稳定性参数计算具体包括如下步骤:
步骤2.1、对数据样本进行切片,将每40s即80个采样样本作为一个计算样本周期;
步骤2.2、对每个计算样本周期内80个采样样本进行均值计算,获得n个计算样本周期均值
步骤2.3、对n个计算样本周期均值的相邻两组进行差运算,获得n-1个计算样本周期均值差
diff
步骤2.4、根据Allen方差计算公式,计算n个计算样本周期均值差的方差值,单位deg/sec
步骤2.5、对样本周期均值差方差值进一步计算,获得轴向运行偏置稳定性参数,单位deg/hour
IRBS=σ
进一步地,所述步骤3中轴向角度随机游走噪声参数计算具体步骤包括:
步骤3.1、对数据样本进行切片,即10个采样样本作为一个计算样本周期;
步骤3.2、对每个计算样本周期内10个采样样本进行均值计算,获得m个计算样本周期均值
步骤3.3、对30个计算样本周期均值的相邻两组进行差运算,获得m-1个计算样本周期均值差
diff
步骤3.4、根据Allen方差计算公式,计算m-1个计算样本周期均值差的方差值,单位deg/sec
步骤3.5、对样本周期均值差方差值进一步计算,获得该轴向角度随机游走噪声参数,单位deg/sqrt(hour)
进一步地,所述步骤4中功率谱密度有效值计算具体步骤包括:
步骤4.1、对数据样本进行切片,即65536个采样样本作为一个计算分段,将数据样本分割为整数n个计算分段,不足数据样本补充为零;
步骤4.2、根据经典功率谱Welch算法,设置窗函数为65536长度的hamming窗,采样率为陀螺仪标称采样率,计算分段间样本无重叠条件进行计算,获得陀螺仪全带宽内功率谱密度PSD;
步骤4.3、对陀螺仪全带宽内功率谱密度PSD计算结果内10Hz至40Hz点进行均方差计算获得10Hz至40Hz内功率谱密度有效值
与现有技术对比,本发明的有益效果是:
本发明能完成惯性导航系统装置中陀螺仪的主要偏置参数,如运行偏置稳定性参数、角度随机游走噪声和噪声功率密度谱的测试。此外,本发明提出的测试装置能够在不同的环境下完成对陀螺仪主要偏置参数的测试,例如:不同的地点、不同的湿度、温度等条件。测试装置的整体结构简单,价格便宜,操作便利,能根据需要测试多种惯性导航系统装置中陀螺仪主要偏置参数性能,因此,本发明有利于提高测试装置的效率,大幅度降低陀螺仪的测试成本。本发明测试方法步骤明确,操作简单,易于工程实现,测试精度高。
附图说明
图1为本发明实施例的惯性导航系统装置中陀螺仪零偏参数测试装置搭建示意图;
图2为本发明实施例的惯性导航系统装置中陀螺仪零偏参数测试流程示意图。
图3为本发明实施例的判断惯性导航系统装置中陀螺仪是否满足惯性导航系统精度要求方法示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
本发明实施例提供了一种用于惯性导航系统装置中陀螺仪零偏参数测试装置,如图1所示,用到的测试设备有:数据采集板、供电锂电池、台钳工装和上位机。其中
台钳工装用以固定惯性导航系统装置,使装置能按照需求方位进行安装放置,所述惯性导航系统装置依照装置内部设置采样率,采集内部陀螺仪测量结果;所述上位机的输出端与数据采集板相连接,用于向所述采集控制板发出控制信号;数据采集板采集惯性导航系统装置中陀螺仪角速度敏感量的数字量化结果,并将该敏感量数据信息传送至上位机进行计算和保存;供电锂电池与数据采集板和惯性导航系统装置相连接并进行供电。
所述上位机包括采集控制和显示模块、数据采集和存储模块和上位机硬盘模块;所述采集控制和显示模块的输出端与所述数据采集板相连接用于发出控制信号;所述数据采集板的输出端通过数据采集和存储模块与所述采集控制和显示模块相连接用于显示数据采集板的工作状态信息;所述数据采集和存储模块的输出端与上位机硬盘模块用于保存原始数据信息。
所述上位机采集控制和显示模块对所述采集控制板发送命令,设置采样时长、数据抽取率和数据包名称;所述采集控制板对惯性导航系统装置在设置采样时长内的全部采集数据进行收取,并依据数据抽取率对收取数据进行抽样和数据打包;所述采集控制板采用二进制格式上传数据包;所述上位机数据采集和存储模块对采集控制板上传打包数据进行接收,并将接收的二进制格式数据包转换为CSV数据格式文件,按照数据包名称存储在所述上位机硬盘模块;所述上位机内通过运行matlab程序,对上位机硬盘模块上位机内存储测量结果进行分析,获得惯性导航系统装置中陀螺仪的零偏参数。
上述测试设备的选用标准如下:
数据采集板使用有线/无线以太网或异步串行通信方式与上位机进行通信,内存或闪存深度优于20MB。
台钳工装选用精密平口钳,台钳可横立、竖立、平放放置,台钳表面平行度优于0.005mm/1000mm。
供电锂电池供电电压适配惯性导航系统装置和数据采集板输入供电电压范围,锂电池容量优于6000mAh。
基于上述用于惯性导航系统装置中陀螺仪零偏参数测试装置,本发明提供了一种用于惯性导航系统装置中陀螺仪零偏参数测试方法。
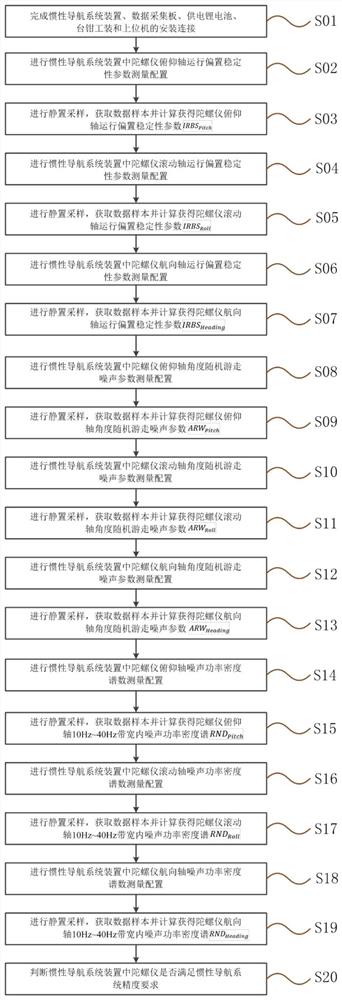
图2为本发明实施例的惯性导航系统装置中陀螺仪的零偏参数测试方法流程示意图,包括以下步骤:
步骤S1、完成惯性导航系统装置、数据采集板、供电锂电池、台钳工装和上位机的安装连接。
具体连接关系为:所述惯性导航系统装置紧固夹持在台钳工装上,所述惯性导航系统装置俯仰轴轴向与台钳工装平放方向平行,所述惯性导航系统装置航向轴轴向与台钳工装横立方向平行,所述惯性导航系统装置滚动轴轴向与台钳工装竖立方向平行。
所述供电锂电池的输出端与数据采集板相连接并为其供电,该供电锂电池的输出端还与惯性导航系统装置的输入端相连接并为其供电。
步骤S2、进行惯性导航系统装置中陀螺仪俯仰轴运行偏置稳定性参数测量,将装有惯性导航系统装置的台钳工装平放平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为2SPS,数据采集时长为1800s,获得数据样本数为3600个。
步骤S3、在步骤S2中设定的条件下进行静置采样,获取3600个数据样本并进行样本切片,将每40s(即80个采样样本)作为一个计算样本周期,将数据样本分割为不少于45个计算样本周期。
对每个计算样本周期内80个采样样本进行均值计算,获得45个计算样本周期均值
对45个计算样本周期均值的相邻两组进行差运算,获得44个计算样本周期均值差
diff
根据Allen方差计算公式,计算44个计算样本周期均值差的方差值,单位deg/sec
对样本周期均值差方差值进一步计算,获得该轴向运行偏置稳定性参数IRBS
IRBS
步骤S4、进行惯性导航系统装置中陀螺仪滚动轴运行偏置稳定性参数测量,将装有惯性导航系统装置的台钳工装竖立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为2SPS,数据采集时长为1800s,获得数据样本数为3600个。
步骤S5、在步骤S4中设定的条件下进行静置采样,获取数据样本并重复步骤S3中计算方法,获得陀螺仪滚动轴运行偏置稳定性参数IRBS
步骤S6、进行惯性导航系统装置中陀螺仪航向轴运行偏置稳定性参数测量,将装有惯性导航系统装置的台钳工装横立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为2SPS,数据采集时长为1800s,获得数据样本数为3600个。
步骤S7、在步骤S6中设定的条件下进行静置采样,获取数据样本并重复步骤S3中计算方法,获得陀螺仪航向轴运行偏置稳定性参数IRBS
步骤S8、进行惯性导航系统装置中陀螺仪俯仰轴角度随机游走噪声参数测量,将装有惯性导航系统装置的台钳工装平放平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为10SPS,数据采集时长为30s,获得数据样本300个。
步骤S9、在步骤S8中设定的条件下进行静置采样,获取300个数据样本并进行样本切片,即10个采样样本作为一个计算样本周期,将数据样本分割为不少于30个计算样本周期。
对每个计算样本周期内30个采样样本进行均值计算,获得30个计算样本周期均值
对30个计算样本周期均值的相邻两组进行差运算,获得29个计算样本周期均值差
diff
根据Allen方差计算公式,计算29个计算样本周期均值差的方差值,单位deg/sec
对样本周期均值差方差值进一步计算,获得该轴向角度随机游走噪声参数ARW
步骤S10、进行惯性导航系统装置中陀螺仪滚动轴角度随机游走噪声参数测量,将装有惯性导航系统装置的台钳工装竖立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为10SPS,数据采集时长不低于30s,获得数据样本不低于300个,静置采样。
步骤S11、在步骤S10中设定的条件下进行静置采样,获取数据样本并重复步骤S9中计算方法,获得陀螺仪滚动轴角度随机游走噪声参数ARW
步骤S12、进行惯性导航系统装置中陀螺仪航向轴角度随机游走噪声参数测量,将装有惯性导航系统装置的台钳工装横立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为10SPS,数据采集时长不低于30s,获得数据样本不低于300个,静置采样。
步骤S13、在步骤S12中设定的条件下进行静置采样,获取数据样本并重复步骤S9中计算方法,获得陀螺仪航向轴角度随机游走噪声参数ARW
步骤S14、进行惯性导航系统装置中陀螺仪俯仰轴噪声功率密度谱测量,将装有惯性导航系统装置的台钳工装平放平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为1000SPS,获得数据样本数为320000个。
步骤S15、在步骤S14中设定的条件下进行静置采样,获取320000个数据样本并进行样本切片,即65536个采样样本作为一个计算分段,将数据样本分割为整数5个计算分段,不足数据样本补充为零。
根据经典功率谱Welch算法,设置窗函数为32768长度的hamming窗,采样率为陀螺仪标称采样率,计算分段间样本无重叠条件进行计算,获得陀螺仪全带宽内功率谱密度PSD。
对陀螺仪全带宽内功率谱密度PSD计算结果内10Hz至40Hz点进行均方差计算获得10Hz至40Hz内功率谱密度有效值(RND
步骤S16、进行惯性导航系统装置中陀螺仪滚动轴噪声功率密度谱测量,将装有惯性导航系统装置的台钳工装竖立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为1000SPS,获得数据样本数为320000个。
步骤S17、在步骤S16中设定的条件下进行静置采样,获取数据样本并重复步骤S15中计算方法,获得陀螺仪滚动轴10Hz~40Hz带宽内噪声功率密度谱(RND
步骤S18、进行惯性导航系统装置中陀螺仪航向轴噪声功率密度谱测量,将装有惯性导航系统装置的台钳工装横立平面与地球重力轴方向垂直放置,通过上位机设置数据采集板的数据抽取率为1000SPS,获得数据样本数为320000个。
步骤S19、在步骤S18中设定的条件下进行静置采样,获取数据样本并重复步骤S15中计算方法,获得陀螺仪航向轴10Hz~40Hz带宽内噪声功率密度谱(RND
步骤S20、如图3所示,判断惯性导航系统装置中陀螺仪是否满足惯性导航系统精度要求。
判断运行偏置稳定性参数测量结果IRBS
判断角度随机游走噪声参数测量结果AWR
判断噪声功率密度谱测量结果;(RND
综上所述,本实施例中用于惯性导航系统装置中陀螺仪的零偏参数测试方法,能够对惯性导航系统装置中陀螺仪的主要偏置参数,例如运行偏置稳定性参数、角度随机游走噪声和噪声功率密度谱进行快速和准确的评定。相比于传统的陀螺仪性能评定试验,本发明提出的测试装置能够在不同的环境下完成对陀螺仪主要偏置参数的测试,例如:不同的地点、不同的湿度、温度等条件。测试装置的整体结构简单,价格便宜,操作便利,有利于提高测试装置的效率,大幅度降低陀螺仪的测试成本。本测试方法步骤明确,操作简单,易于工程实现,测试精度高。
上述具体实施方案仅用于解释和说明本发明的技术方案,但并不能构成对权力要求的保护范围的限定。本领域技术人员应当清楚,在本发明技术方案的基础上做任何简单的变形和替换而得到的新的技术方案,均将落入本发明的保护范围之内。
- 用于惯性导航系统装置中陀螺仪零偏参数测试装置及方法
- 一种惯性测量单元中陀螺仪的偏转调制零偏补偿方法