反衍混合自适应补偿干涉检测方法、装置和计算机设备
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于光学精密测量技术领域,特别涉及一种反衍混合自适应补偿干涉检测方法、装置和计算机设备。
背景技术
超精密光学面形的面形误差(加工表面的实际形状与理论形状的偏差)可达纳米级,为满足这一要求,需要采用确定性加工方式。通过检测加工前的面形误差分布,指导抛光工具实现对误差高点的定量修除,从而提高面形精度。作为超精密光学面形制造的前提,面形检测技术能否保障光学面形的高效率制造,支撑我国在ICF、空间望远镜等大科学装置建设领域抢占未来科技竞争制高点面临新的挑战。
超精密光学制造主要包括铣磨成型、研磨及抛光三个阶段。各个制造阶段都必须要有相应动态范围(即仪器量程)和精度的检测技术。在铣磨及研磨阶段,面形误差较大,一般在数十微米量级,在坐标测量的量程和精度内。在抛光后期即精抛阶段,面形收敛到2~3μm,一般采用波面干涉测量。干涉检测以波面作为样板,要求波面形状与被测面的设计形状完全一致。入射波面经被测面垂直反射后,携带其面形误差,原路返回并与标准参考波面在干涉仪电荷耦合元件(charge-coupled device,CCD)像面处发生干涉,干涉图就包含了被测面的面形误差。然而,粗抛光阶段的面形误差在10μm数量级,并且常会伴随塌边或翘边的问题,局部区域面形误差梯度很大,超出了传统波面干涉仪的动态范围。另外,面形误差较大导致条纹过密,检测结果不完整,无法用于指导加工。而坐标测量的采样密度较低,无法检测面形误差的中高频成分,并且精度远低于干涉测量方法。因此,面形很难收敛到2~3μm进入波面干涉仪的动态范围内。
针对这个问题,自适应补偿干涉检测方法应运而生。自适应补偿干涉检测方法将自适应光学技术引入到干涉检测领域,使用优化算法控制空间光调制器产生可变的波前对未知局部面形大误差进行迭代补偿。利用干涉条纹可解析程度等补偿效果作为实时反馈,确保迭代过程收敛,最终实现面形大误差的检测,即干涉图可以完全解析。
自适应补偿干涉检测系统的核心元件是自适应光学补偿元件。兼具高分辨率、大冲程和高光能利用率的自适应光学元件是适应高空间频率、大幅值复杂面形大误差的基础。变形镜和空间光调制器是目前最成熟的商用自适应光学元件。采用变形镜作为自适应补偿元件,变形镜是反射元件,反射率在90%以上,能够满足干涉检测对光能利用率的要求。然而,对于商用变形镜而言,高分辨率和大冲程是一对矛盾体。常用变形镜的驱动器在10×10以下,其机械位移的光场调制原理使其可以具备100微米左右的冲程;但不能产生高空间频率的像差形状(高阶像差),因此变形镜的分辨率远远不能满足典型面形大误差对像差补偿阶次的要求。而高分辨率变形镜的冲程极小,一般在5微米以下,不能适应粗抛阶段大面形误差对像差补偿幅值的要求。并且即使是目前最高商用分辨率之一的变形镜(美国BMC,64×64分辨率),其性能也远远不能满足粗抛阶段面形大误差对于高级彗差、高级像散等复杂高阶像差的补偿要求。
而采用空间光调制器作为自适应补偿元件,空间光调制器可以简单的理解为液晶阵列,由于采用集成电路的加工工艺,其分辨率可以做到3840×2160(德国Holoeye, GAEA-2-VIS),能够满足大面形误差对高阶像差的补偿需求。然而,空间光调制器受限于其电控应力双折射的光场调制原理,即使按每波长仅需8列像素的要求将代表初级球差的条纹图案加载到空间光调制器上,也仅仅能产生约15微米左右的初级球差,无法满足典型面形大误差对像差补偿幅值的要求。此外,空间光调制器工作在衍射模式下,其光能衍射效率一般在34%左右,光能利用率较低。
综上所述,采用单一自适应光学元件的性能短板,使得自适应干涉检测方法在检测大幅值、高空间频率的面形大误差时捉襟见肘。如何构建兼具高分辨率、大冲程和高光能利用率的自适应光学组件已成为提升自适应补偿干涉检测方法性能、适应高空间频率、大幅值复杂面形粗抛阶段面形大误差的关键。
发明内容
针对现有技术存在的缺陷,本发明提供一种反衍混合自适应补偿干涉检测方法、装置和计算机设备。
为实现上述技术目的,本发明提出的技术方案为:
反衍混合自适应补偿干涉检测方法,包括:
S1 搭建反衍混合自适应补偿干涉检测装置,包括波面干涉仪、偏振分光镜、光束准直系统、四分之一波片、缩束系统、分光镜、空间光调制器、变形镜、变倍镜、波前探测器、补偿器、被测面、检测控制器、像差控制器;波面干涉仪发出的偏振光传输光路上设有偏振分光镜,偏振分光镜的透射光路上依次设有光束准直系统、四分之一波片、缩束系统和分光镜,分光镜的反射光路上设置有变倍镜和波前探测器,分光镜的透射光路上设置空间光调制器以及变形镜,空间光调制器以及变形镜均由像差控制器驱动;偏振分光镜的反射光路上依次设有补偿器和被测面;
S2利用变形镜将低阶像差补偿掉;
将反衍混合自适应补偿干涉检测装置中的空间光调制器的位置留空,仅保留变形镜,根据被测面超波面干涉仪动态范围误差的模式像差系数和变形镜的像差补偿阶数,检测控制器输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成变形镜的驱动信号,控制像差控制器驱动变形镜产生低阶像差补偿,将低阶像差补偿掉;
S3为了获得变形镜的实际形变量,采用波前探测器检测变形镜的形变,检测精度在纳米级;
S4 利用空间光调制器将高阶像差补偿掉;
变形镜保持当前状态固定不动,在分光镜和变形镜之间插入空间光调制器,根据被测面超波面干涉仪动态范围误差的模式像差系数和空间光调制器的像差补偿阶数,检测控制器输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成空间光调制器的驱动信号,控制像差控制器驱动空间光调制器产生高阶像差补偿,将高阶像差补偿掉;
S5当满足条纹可被波面干涉仪解析的条件时,则利用反衍混合自适应补偿干涉检测装置实施被测面的面形误差检测,将此时波面干涉仪所得到的检测结果减去S3中检测到的变形镜的形变,得到被测面的面形误差。
实施被测面的面形误差检测时,从波面干涉仪发出的参考波前首次经过偏振分光镜时只能透射,透射光经过光束准直系统、四分之一波片、缩束系统之后,大部分光透过分光镜,经过空间光调制器和变形镜之后原路返回到达偏振分光镜。由于光束两次经过四分之一波片,因此偏振方向偏转90度,到达偏振分光镜时只能反射,反射出的光束经过补偿器,达到被测面,经被测面反射后,到达偏振分光镜时只能反射,反射出的光束经过光束准直系统、四分之一波片、缩束系统之后,大部分光透过分光镜,经过空间光调制器和变形镜之后原路返回到达偏振分光镜;由于光束再一次经过四分之一波片两次,因此偏振方向再次偏转90度,到达偏振分光镜时只能透射,光束返回波面干涉仪与波面干涉仪的参考波前发生干涉,波面干涉仪所得到的检测结果中就包含了被测面的面形误差,将变形镜的形变从检测结果中减去,则得到被测面的面形误差,完成被测面的面形误差检测。
本发明中检测控制器上加载有自适应补偿算法,所述自适应补偿算法可以采用现有的各种优化类算法或学习类算法,如梯度下降算法、遗传算法、训练好的机器学习网络算法等,自适应补偿算法能够实现对被测面超波面干涉仪动态范围误差的模式像差系数的推测。自适应补偿算法根据被测面超波面干涉仪动态范围误差的模式像差系数和自适应补偿元件的像差补偿阶数,实现对被测面超波面干涉仪动态范围误差的模式像差系数的推测,输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,根据被测面超波面干涉仪动态范围误差的模式像差系数的推测值生成自适应光学元件的驱动信号,控制自适应补偿元件产生迭代变化的像差补偿。根据像差补偿效果的实时反馈,如干涉仪干涉条纹疏密的变化,确定补偿像差迭代变化的方向,直到干涉条纹可以被波面干涉仪完全解析,即可以测得被测面的面形误差。变形镜、空间光调制器均为自适应光学元件。在步骤S2中,根据被测面超波面干涉仪动态范围误差的模式像差系数和空间光调制器的像差补偿阶数,检测控制器运行自适应补偿算法,输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成变形镜的驱动信号,驱动变形镜产生低阶像差补偿,将幅值占比大的低阶像差补偿掉。在步骤S4中,根据被测面超波面干涉仪动态范围误差的模式像差系数和空间光调制器的像差补偿阶数,检测控制器运行自适应补偿算法,输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成空间光调制器的驱动信号,驱动空间光调制器产生高阶像差补偿,将高阶像差补偿掉。
本发明中,被测面超波面干涉仪动态范围误差的模式像差系数的获取方法不限,可以通过高动态范围的三坐标或轮廓测量方法得到被测面面形误差的近似值,然后通过模式像差分解的方法获得被测面超波面干涉仪动态范围误差的模式像差系数。也可以基于优化算法控制自适应补偿元件产生迭代变化的像差补偿,根据补偿效果的实时反馈,如干涉仪干涉条纹疏密的变化,确定补偿像差迭代变化的方向,直到干涉条纹可以被干涉仪完全解析,即可以测得被测面超波面干涉仪动态范围误差的模式像差系数。
本发明中变形镜的像差补偿阶数是根据变形镜生成像差的截止频率确定。变形镜的像差补偿阶数中的最大像差补偿阶数应大于变形镜的截止频率。变形镜的截止频率由其驱动器个数决定。
本发明中的空间光调制器,用于将变形镜未补偿的高阶像差补偿掉。空间光调制器的像差补偿阶数中的最大像差补偿阶数应大于空间光调制器的截止频率。空间光调制器的截止频率由其像素分辨率决定。
本发明被测面误差幅值或梯度过大,对应的干涉条纹过于密集,超出波面干涉仪的动态范围,利用空间光调制器、变形镜共同补偿被测面超波面干涉仪动态范围的面形大误差,其中变形镜基于机械变形实现空间反射波前的自由调制,用来补偿低阶像差;空间光调制器基于全息原理实现空间衍射波前的自由调制,用来补偿高阶像差。
进一步地,本发明中的像差控制器包括变形镜高压驱动器和空间光调制器像差驱动灰度图产生装置,其中变形镜高压驱动器控制变形镜,空间光调制器像差驱动灰度图产生装置用于控制空间光调制器。
进一步地,本发明中的波面干涉仪是菲索型干涉仪或者泰曼-格林型干涉仪。
本发明提供一种反衍混合自适应补偿干涉检测装置,包括波面干涉仪、偏振分光镜、光束准直系统、四分之一波片、缩束系统、分光镜、空间光调制器、变形镜、变倍镜、波前探测器、补偿器、被测面、检测控制器、像差控制器;波面干涉仪发出的偏振光传输光路上设有偏振分光镜,偏振分光镜的透射光路上依次设有光束准直系统、四分之一波片、缩束系统和分光镜,分光镜的反射光路上设置有变倍镜和波前探测器,分光镜的透射光路上设置空间光调制器以及变形镜,空间光调制器以及变形镜均由像差控制器驱动,其中变形镜用于产生低阶像差补偿,空间光调制器用于产生高阶像差补偿;偏振分光镜的反射光路上依次设有补偿器和被测面;
利用变形镜将低阶像差补偿掉、利用空间光调制器将高阶像差补偿掉且当满足条纹可被波面干涉仪解析的条件时,实施被测面的面形误差检测:从波面干涉仪发出的参考波前首次经过偏振分光镜时只能透射,透射光经过光束准直系统、四分之一波片、缩束系统之后,大部分光透过分光镜,经过空间光调制器和变形镜之后原路返回到达偏振分光镜。由于光束两次经过四分之一波片,因此偏振方向偏转90度,到达偏振分光镜时只能反射,反射出的光束经过补偿器,达到被测面,经被测面反射后,到达偏振分光镜时只能反射,反射出的光束经过光束准直系统、四分之一波片、缩束系统之后,大部分光透过分光镜,经过空间光调制器和变形镜之后原路返回到达偏振分光镜;由于光束再一次经过四分之一波片两次,因此偏振方向再次偏转90度,到达偏振分光镜时只能透射,光束返回波面干涉仪与波面干涉仪的参考波前发生干涉,波面干涉仪所得到的检测结果中就包含了被测面的面形误差,将变形镜的形变从检测结果中减去,则得到被测面的面形误差,完成被测面的面形误差检测。
本发明提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述反衍混合自适应补偿干涉检测方法中的以下步骤:根据被测面超波面干涉仪动态范围误差的模式像差系数和自适应补偿元件的像差补偿阶数,检测控制器输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成自适应补偿元件的驱动信号,其中变形镜、空间光调制器均为自适应补偿元件。
与现有技术相比,本发明的优点在于:
本发明面向粗抛阶段典型面形大误差特性,先将反衍混合自适应补偿干涉检测装置中的空间光调制器的位置留空,仅保留变形镜,使用像差控制器驱动变形镜产生低阶像差补偿,将幅值占比大的低阶像差补偿掉;然后变形镜保持当前状态固定不动,在分光镜和变形镜之间插入空间光调制器,利用像差控制器驱动空间光调制器产生高阶像差补偿,将幅值占较小的高阶像差补偿掉,通过级联自适应光学元件的方法克服单一自适应光学元件性能短板,提升自适应补偿干涉检测方法性能,具有更灵活适应研磨、抛光过渡阶段粗抛大面形干涉检测的优点。
本发明既充分利用了机械式变形镜产生大幅值低阶像差的能力,又充分利用了百万量级驱动器(像素)数目的空间光调制器产生丰富高阶像差模式的灵活性,可以实现高空间频率、大幅值、多像差模式的研磨、抛光过渡阶段大面形误差的检测,对于加快复杂光学面形加工进度具有较为重要的意义。
附图说明
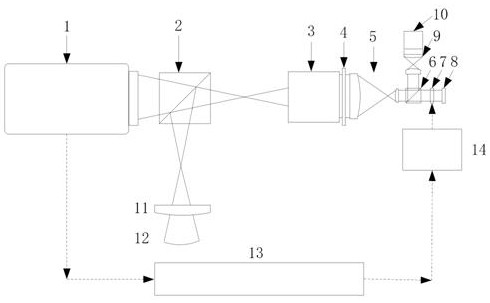
图1是本发明一实施例的原理图;
图2为本发明一实施例中变形镜补偿前的干涉图;
图3为本发明一实施例中变形镜补偿前的剩余像差图;
图4为本发明一实施例中变形镜补偿后的干涉图;
图5为本发明一实施例中变形镜补偿后的剩余像差图;
图6为本发明一实施例中空间光调制器补偿后的干涉图;
图7为本发明一实施例中空间光调制器补偿后的的剩余像差图;
图中标号:
1、波面干涉仪;2、偏振分光镜;3、光束准直系统;4、四分之一波片;5、缩束系统;6、分光镜;7、空间光调制器;8、变形镜;9、变倍镜;10、波前探测器;11、补偿器;12、被测面;13、检测控制器;14、像差控制器。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚明白,下面将以附图及详细叙述清楚说明本发明所揭示内容的精神,任何所属技术领域技术人员在了解本发明内容的实施例后,当可由本发明内容所教示的技术,加以改变及修饰,其并不脱离本发明内容的精神与范围。本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
参照图1,本发明一实施例提供一种反衍混合自适应补偿干涉检测装置,包括波面干涉仪1、偏振分光镜2、光束准直系统3、四分之一波片4、缩束系统5、分光镜6、空间光调制器7、变形镜8、变倍镜9、波前探测器10、补偿器11、被测面12、检测控制器13、像差控制器14。
波面干涉仪1发出的偏振光传输光路上设有偏振分光镜2,偏振分光镜2的透射光路上依次设有光束准直系统3、四分之一波片4、缩束系统5和分光镜6,分光镜6的反射光路上设置有变倍镜9和波前探测器10,分光镜6的透射光路上设置空间光调制器7以及变形镜8,空间光调制器7以及变形镜8均由像差控制器14驱动,其中变形镜8用于产生低阶像差补偿,空间光调制器7用于产生高阶像差补偿;偏振分光镜2的反射光路上依次设有补偿器11和被测面12。
先利用变形镜将低阶像差补偿掉,方法如下:将反衍混合自适应补偿干涉检测装置中的空间光调制器的位置留空,仅保留变形镜8,检测控制器13上加载有自适应补偿算法,自适应补偿算法根据被测面超波面干涉仪动态范围误差的模式像差系数和变形镜的像差补偿阶数,输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器14生成变形镜的驱动信号,控制像差控制器14驱动变形镜8产生低阶像差补偿,将低阶像差补偿掉。
然后利用空间光调制器7将高阶像差补偿掉,方法如下:变形镜8保持当前状态固定不动,在分光镜6和变形镜8之间插入空间光调制器7,检测控制器13上加载有自适应补偿算法,自适应补偿算法根据被测面超波面干涉仪动态范围误差的模式像差系数和空间光调制器7的像差补偿阶数,输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器14生成空间光调制器7的驱动信号,控制像差控制器14驱动空间光调制器7产生高阶像差补偿,将高阶像差补偿掉。
当满足条纹可被波面干涉仪解析的条件时,则由反衍混合自适应补偿干涉检测装置实施被测面的面形误差检测:从波面干涉仪1发出的参考波前首次经过偏振分光镜2时只能透射,透射光经过光束准直系统3、四分之一波片4、缩束系统5之后,大部分光透过分光镜6,经过空间光调制器7和变形镜8之后原路返回到达偏振分光镜2。由于光束两次经过四分之一波片4,因此偏振方向偏转90度,到达偏振分光镜2时只能反射,反射出的光束经过补偿器11,达到被测面12,经被测面12反射后,到达偏振分光镜2时只能反射,反射出的光束经过光束准直系统3、四分之一波片4、缩束系统5之后,大部分光透过分光镜,经过空间光调制器7和变形镜8之后原路返回到达偏振分光镜2;由于光束再一次经过四分之一波片4两次,因此偏振方向再次偏转90度,到达偏振分光镜2时只能透射,光束返回波面干涉仪1与波面干涉仪1的参考波前发生干涉,波面干涉仪所得到的检测结果中就包含了被测面的面形误差,将变形镜的形变从检测结果中减去,则得到被测面的面形误差,完成被测面的面形误差检测。
本实施例中的被测面误差幅值或梯度过大,对应的干涉条纹过于密集,超出波面干涉仪的动态范围,利用空间光调制器、变形镜共同补偿被测面超波面干涉仪动态范围的面形大误差。其中变形镜基于机械变形实现空间反射波前的自由调制,主要用来补偿较大幅值的低阶像差。空间光调制器基于全息原理实现空间衍射波前的自由调制,主要用来补偿较小幅值的高阶像差,空间光调制器采用Holoeye公司的LC 2012,变形镜采用Alpao公司的DM 97。
所述像差控制器可以实现变形镜和空间光调制器的像差解耦控制与组合优化补偿,将被测面的模式像差系数分解为高阶像差和低阶像差,并分别控制变形镜和空间光调制器。本实施例中的像差控制器包括变形镜高压驱动器和空间光调制器像差驱动灰度图产生装置,其中变形镜高压驱动器控制变形镜,空间光调制器像差驱动灰度图产生装置用于控制空间光调制器。
本实施例中的波面干涉仪是菲索型干涉仪或者泰曼-格林型干涉仪。
本实施例中的自适应补偿算法采用优化类算法或学习类算法,自适应补偿算法能够实现对被测面超波面干涉仪动态范围误差的模式像差系数的推测。
本发明一实施例提供一种反衍混合自适应补偿干涉检测方法,包括以下步骤:
S1 搭建如图1所示的反衍混合自适应补偿干涉检测装置,包括波面干涉仪、偏振分光镜、光束准直系统、四分之一波片、缩束系统、分光镜、空间光调制器、变形镜、变倍镜、波前探测器、补偿器、被测面、检测控制器、像差控制器;波面干涉仪发出的偏振光传输光路上设有偏振分光镜,偏振分光镜的透射光路上依次设有光束准直系统、四分之一波片、缩束系统和分光镜,分光镜的反射光路上设置有变倍镜和波前探测器,分光镜的透射光路上设置空间光调制器以及变形镜,空间光调制器以及变形镜均由像差控制器驱动;偏振分光镜的反射光路上依次设有补偿器和被测面;
S2确定变形镜的像差补偿阶数,变形镜补偿低阶像差,利用变形镜将低阶像差补偿掉;
根据变形镜生成像差的截止频率确定变形镜可实施补偿的低阶像差阶数。变形镜的像差补偿阶数中的最大像差补偿阶数应大于变形镜的截止频率。变形镜的截止频率由其驱动器个数决定。
将反衍混合自适应补偿干涉检测装置中的空间光调制器的位置留空,仅保留变形镜,根据被测面超波面干涉仪动态范围误差的模式像差系数和变形镜的像差补偿阶数,检测控制器输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成变形镜的驱动信号,控制像差控制器驱动变形镜产生低阶像差补偿,将低阶像差补偿掉。本实施例中,变形镜补偿前的干涉图如图2所示,剩余像差如图3所示,变形镜补偿后的干涉图如图4所示,剩余像差如图5所示。变形镜将幅值占比较大的低阶像差补偿掉后,剩余像差的幅值较小,但仍存在高阶像差,边缘相位梯度较大,既不在变形镜的补偿范围内,干涉仪又无法解析。
S3为了获得变形镜的实际形变量,采用波前探测器检测变形镜的形变,检测精度在纳米级;
S4 确定空间光调制器的像差补偿阶数,空间光调制器补偿变形镜未补偿的高阶像差,利用空间光调制器将高阶像差补偿掉;
根据空间光调制器生成像差的截止频率确定空间光调制器可实施补偿的低阶像差阶数。空间光调制器的像差补偿阶数中的最大像差补偿阶数应大于空间光调制器的截止频率。空间光调制器的截止频率由其像素分辨率决定。
变形镜保持当前状态固定不动,在分光镜和变形镜之间插入空间光调制器,根据被测面超波面干涉仪动态范围误差的模式像差系数和空间光调制器的像差补偿阶数,检测控制器输出被测面超波面干涉仪动态范围误差的模式像差系数的推测值,控制像差控制器生成空间光调制器的驱动信号,控制像差控制器驱动空间光调制器产生高阶像差补偿,将高阶像差补偿掉。本实施例中,空间光调制器补偿后的干涉图如图6所示,剩余像差如图7所示,变形镜和空间光调制器级联补偿后剩余像差的幅值较小,并且不存在局部大梯度区域,即高阶像差也得到了较好的补偿。
S5 当满足条纹可被波面干涉仪解析的条件,则利用反衍混合自适应补偿干涉检测装置实施被测面的面形误差检测。
实施被测面的面形误差检测时,从波面干涉仪发出的参考波前首次经过偏振分光镜时只能透射,透射光经过光束准直系统、四分之一波片、缩束系统之后,大部分光透过分光镜,经过空间光调制器和变形镜之后原路返回到达偏振分光镜。由于光束两次经过四分之一波片,因此偏振方向偏转90度,到达偏振分光镜时只能反射,反射出的光束经过补偿器,达到被测面,经被测面反射后,到达偏振分光镜时只能反射,反射出的光束经过光束准直系统、四分之一波片、缩束系统之后,大部分光透过分光镜,经过空间光调制器和变形镜之后原路返回到达偏振分光镜;由于光束再一次经过四分之一波片两次,因此偏振方向再次偏转90度,到达偏振分光镜时只能透射,光束返回波面干涉仪与波面干涉仪的参考波前发生干涉,波面干涉仪所得到的检测结果中就包含了被测面的面形误差,将变形镜的形变从检测结果中减去,则得到被测面的面形误差,完成被测面的面形误差检测。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 反衍混合自适应补偿干涉检测方法、装置和计算机设备
- 反衍混合自适应补偿干涉检测方法、装置和计算机设备