一种煤矿采掘装备数据分析预警方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及数据分析技术领域,具体是一种煤矿采掘装备数据分析预警方法。
背景技术
煤矿采掘装备众多,可分为应用于露天矿的边帮连续采煤机,以及应用于井工矿的掘进机、掘锚机、快速掘进装备等。由于开采工艺及应用场景不同,且各类装备的设计要求及使用方式不同,采掘装备当前的运行状态缺少数据信息反馈;或是数据显示简单分散、依装备各异,缺少通用性和延续性;或是装备数据无法远程传回至生产设计厂商,操作人员及生产设计人员无法掌握装备实时运行状态,无法预判装备可能出现的隐患及问题。煤矿采掘装备的智能化作为煤矿生产及装备设计的必然趋势,要求其配套的数据系统应满足远程化、实时性、通用性、可配置和可扩展性等。
发明内容
本发明为了解决上述问题,提供一种煤矿采掘装备数据分析预警方法。
本发明采取以下技术方案:一种煤矿采掘装备数据分析预警方法,包括:
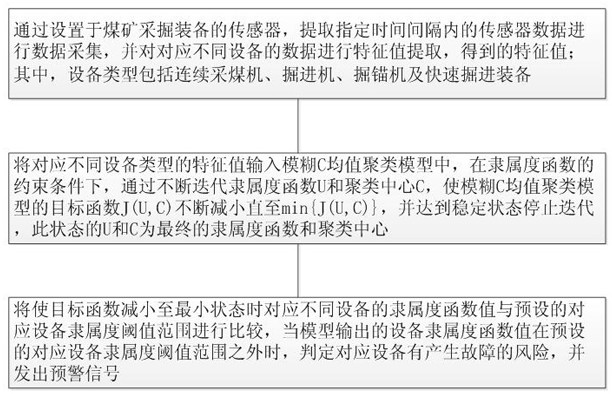
通过设置于煤矿采掘装备的传感器,提取指定时间间隔内的传感器数据进行数据采集,并对对应不同设备的数据进行特征值提取,得到的特征值E,表示为E=[M α β γ a
将对应不同设备类型的特征值输入模糊C均值聚类模型中,在隶属度函数
将使目标函数减小至最小状态时对应不同设备的隶属度函数值与预设的对应设备隶属度阈值范围进行比较,当模型输出的设备隶属度函数值在预设的对应设备隶属度阈值范围之外,判定对应设备有产生故障的风险,并发出预警信号。
其中,对于掘进机机身的监测,涉及有姿态参数和位置参数的检测;其中,姿态参数包括航向角、俯仰角、横滚角;设航向角为α,范围0°~360°,俯仰角为β,范围-180°~180°,横滚角为γ,范围-180°~180°;掘进机在工作过程中,为使其沿设定前进方向行走,对姿态参数设定阈值范围;设航向角α的阈值为τ
其中,连采机机身监测内容与掘进机机身监测一致,归为同一类型。
其中,对于掘进机截割头的监测,包括姿态参数、位置参数及截割电机参数;设截割头航向角为α
其中,对于掘锚机锚护的监测,涉及打锚杆和支护过程参数,包括液压油缸行程L
其中,对于快速掘进装备的监测,涉及后配套运输参数,包括二运电机电流I
其中,定义对应四类采掘装备的特征值E为以下一系列参数:E=[M α β γ a
其中,将不同机型对应的不同特征值作为模糊C均值聚类模型的输入,进行健康诊断分析,用来判别装备可能存在的隐患和故障,通过特征值对其状态进行分类,提前预判装备可能存在的问题;其中,
将特征值作为输入至模糊C均值聚类,x为特征值E中的元素,U(x)=u
与现有技术相比,本发明提供的一种煤矿采掘装备数据分析预警方法,针对当前煤矿采掘装备的运行状态数据单一、无法按装备类型进行有效整合,本发明通过装备内有线、装备间无线的传输方式,建立具有通用性和可扩展性的数据系统,实现可按照当前装备类型进行选择和配置,同时通过数据、三维动画等多种方式展示装备运行状态,操作人员和生产设计人员可实时掌握装备信息,有效减少工作面人数、提高装备智能化水平。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
图1是本发明提供的一种煤矿采掘装备数据分析预警方法的流程示意图。
图2是本发明提供的一种煤矿采掘装备数据分析预警方法的数据采集流程示意图。
图3是本发明提供的一种煤矿采掘装备数据分析预警方法的数据采集类型示意图。
具体实施方式
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
参阅图1,本发明提供了一种煤矿采掘装备数据分析预警方法,包括:
通过设置于煤矿采掘装备的传感器,提取指定时间间隔内的传感器数据进行数据采集,并对对应不同设备的数据进行特征值提取,得到的特征值E,表示为E=[M α β γ a
将对应不同设备类型的特征值输入模糊C均值聚类模型中,在隶属度函数
将使目标函数减小至最小状态时对应不同设备的隶属度函数值与预设的对应设备隶属度阈值范围进行比较,当模型输出的设备隶属度函数值在预设的对应设备隶属度阈值范围之外,判定对应设备有产生故障的风险,并发出预警信号。
按照装备类型不同,可将数据系统分为连采机、掘进机、掘锚机、快速掘进装备等,各装备可作为煤矿采掘装备数据系统中一个独立的子数据系统。如图2所示,数据系统的传输过程采用装备内有线、装备间无线的方式,即每个装备设有一个交换机,用于采集装备运行状态参数的各类传感器通过网线等有线方式与交换机连接,不同装备按照需求不同配置不同传感器,连接方式相似。不同装备之间,采用无线通信方式进行数据传输,各装备交换机均连接至主交换机,主交换机中的数据通过无线数据发送模块和无线数据接收模块进行传输,并与近端工控机相连,便于近端控制中心数据集中控制。通过无线收发模块的数据传输,将煤矿不同类型的装备相互连接并回传至远端数据平台,用于操作人员的远程显示和状态确认。同时,远端数据平台还可通过无线路由将装备数据传输至生产设计人员的远端数据中心,便于装备状态的预判。
如图3所示,数据系统的各子系统组成有相同模块和依装备类型的不同模块,相同模块主要为PLC控制器,温度、压力、液位、油缸等各类传感器,摄像头等。对于不同的装备,需根据不同功能进行个性化定制和模块化设计。连采机,主要应用于露天边帮环境下,机身与截割臂一体,需实时监测连采机机身位置及姿态。掘进机、掘锚机、快速掘进装备应用于井工环境,且结构复杂。掘进机机身和截割头可相对摆动,需对机身和截割头分别进行位置和姿态监测,同时对机身行走、截割过程、成型轨迹、机身及截割头空间位置变化进行动态模拟显示,且可通过远端对机身和截割头位置及姿态、截割头自动截割进行控制。掘锚机分为掘进和锚护两模块,掘进过程与掘进机类似,锚护过程需实时监测锚杆、支护、液压油缸位置及状态,且可通过远端对截割、锚杆支护过程进行步进控制。快速掘进装备主要为掘进和后配套两模块,掘进过程与掘进机类似,后配套需实时监测运输电机、油缸、皮带等状态,且可通过远端对截割、运输过程进行控制。基于以上不同装备的功能,可将数据系统分为基础和可配置两种类型,以掘进机为基础配置,在此基础上增加截割头、锚护、后配套运输三个可选模块,基础配置除去截割头模块为连采机子系统,基础配置与锚护模块结合为掘锚机子系统,基础配置与后配套运输模块结合为快速掘进装备子系统,此种配置方法充分考虑各类型装备的共性与特殊性。
其中,对于掘进机机身的监测,涉及有姿态参数和位置参数的检测;其中,姿态参数包括航向角、俯仰角、横滚角;设航向角为α,范围0°~360°,俯仰角为β,范围-180°~180°,横滚角为γ,范围-180°~180°;掘进机在工作过程中,为使其沿设定前进方向行走,对姿态参数设定阈值范围;设航向角α的阈值为τ
其中,连采机机身监测内容与掘进机机身监测一致,归为同一类型。
其中,对于掘进机截割头的监测,包括姿态参数、位置参数及截割电机参数;设截割头航向角为α
其中,对于掘锚机锚护的监测,涉及打锚杆和支护过程参数,包括液压油缸行程L
其中,对于快速掘进装备的监测,涉及后配套运输参数,包括二运电机电流I
其中,定义对应四类采掘装备的特征值E为以下一系列参数:E=[M α β γ a
其中,将不同机型对应的不同特征值作为模糊C均值聚类模型的输入,进行健康诊断分析,用来判别装备可能存在的隐患和故障,通过特征值对其状态进行分类,提前预判装备可能存在的问题;其中,
将特征值作为输入至模糊C均值聚类,x为特征值E中的元素,U(x)=u
值聚类的目标函数为
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
- 一种煤矿采掘装备数据分析预警方法
- 一种非即时能源数据分析的大数据预警方法与装置