一种空投式水下航行器
文献发布时间:2023-06-19 11:30:53
技术领域
本发明属于水下航行器技术领域,尤其涉及一种空投式水下航行器。
背景技术
水下航行器作为海洋环境和资源调查监测的重要技术装备越来越受到各国的重视,在海洋资源开发以及海洋环境监测方面发挥着重要作用。目前,国内外研究者围绕水下航行器的动力学建模、水动力性能、样机研发等开展了许多研究。现有的水下航行器往往通过母船搭载到达指定海域布放,所需时间较长,且需要大量人力和财力,限制了水下航行器在某些突发情况下的应用,如失事飞机的黑匣子搜索、偶发自然现象探测等。
针对海洋发展对相关海洋现象精准化、实时化的观测需求,解决海况突变的现实因素对水下航行器采用母船人工化布放限制的难题,以降低现有水下航行器布放环节对母船及相关技术人员依赖和极端海况的制约、降低水下航行器布放的费效比为目标,需要进行无人机与水下航行器功能与控制的高融合集成设计,开展可适用于无人机搭载、投放的水下航行器整机创新设计,因此,空投式水下航行器对关心海洋、认识海洋及经略海洋具有重要的意义。
发明内容
针对现有技术存在的问题,本发明提供了一种空投式水下航行器,旨在解决目前现有技术中无适用于无人机投放的水下航行器的问题。
本发明是这样实现的,一种空投式水下航行器,包括航行器主体,所述航行器主体具有舱体,其特征在于:所述航行器主体安装有可收展的机翼;所述机翼包括收展骨架机构和设于收展骨架机构外侧且由收展骨架机构支撑柔性蒙皮;收展骨架机构包括基架、第一收展支杆和第二收展支杆,基架安装可沿基架长度方向直线活移的活块,所述第一收展支杆的内端与所述基架通过第一销轴铰接,所述第二收展支杆的内端通过第二销轴铰接活块,所述第一收展支杆和第二收展支杆通过第三销轴铰接,所述基架、第一收展支杆和第二收展支杆围构的三边形框架通过活块的活移可整体收缩至舱体内侧或部分展开出舱体外侧,基架安装控制所述活块活移的收展驱动部件。
现有水下航行器之所以无法进行空投,主要是因为水下航行器的机翼在航行器下落以及进入水中时易因冲击受损。本发明与现有技术相比,水下航行器的机翼为可收缩至舱体内侧的具有收展功能的异形结构,能够避免机翼在空中高速下落过程中或者跨介质过程中由于冲击而受损,保证航行器入水后机翼正常工作。
在上述技术方案中,优选的,所述收展驱动部件为安装在所述基架上的收展弹簧,所述收展弹簧对所述活块施加靠近第一收展支杆内端的力。
在上述技术方案中,优选的,所述收展驱动部件为丝杠电机组件,所述丝杠与所述活块通过螺纹连接,所述丝杠的轴线与所述活块的活移方向平行,所述丝杠转动并驱动活块活移。
在上述技术方案中,优选的,所述收展骨架机构包括至少一个与三边形框架同平面的收展三角框架单元,三角收展框架单元由两根架杆和一根恢复弹簧通过销轴铰接围构而成,两架杆之一与所述活块连接。
在上述技术方案中,优选的,所述第二收展支杆的中部与所述第一收展支杆的外端部通过所述第三销轴铰接;包括第一恢复弹簧、第二恢复弹簧和连杆,所述第一恢复弹簧的一端与所述第二收展支杆的外端通过第四销轴铰接,所述第一恢复弹簧的另一端与所述第一收展支杆的中部通过第五销轴铰接;所述第二收展支杆的外端部与连杆的一端通过所述第四销轴铰接,所述连杆的另一端与第二恢复弹簧的端部通过第六销轴铰接,所述第二恢复弹簧的另一端部与所述活块通过所述第二销轴铰接。
在上述技术方案中,优选的,所述航行器主体安装降落伞单元。可以通过降落伞单元将下落的航行器减速至安全入水速度。
在上述技术方案中,优选的,所述降落伞单元包括主伞和副伞,所述主伞和副伞通过脱离装置安装在所述航行器主体上。
在上述技术方案中,优选的,所述脱离装置包括电源正极端子、电源负极端子、熔断丝、固定座、降落伞绳、脱落杆、恢复杆、恢复弹簧和固定套筒,所述降落伞绳的外端连接主伞和副伞,所述降落伞绳的内端连接脱落杆,所述固定座和所述固定套筒固定在所述舱体后端内侧,所述电源正极端子穿过所述固定座的端部通孔伸入固定座,所述电源负极端子安装在所述固定座上且与固定座电连接,所述熔断丝的一端与所述电源正极端子连接,所述恢复杆穿入所述固定座且与固定座电连接,所述熔断丝的另一端与所述恢复杆穿入所述固定座中的一端连接,所述恢复杆的另一端与所述恢复弹簧连接,所述恢复杆可沿着固定座的轴线移动,所述脱落杆穿入所述固定套筒中,所述恢复杆贯穿所述脱落杆与所述固定套筒,所述恢复弹簧与所述舱体内壁固连。
附图说明
图1是本发明中机翼展开状态下的结构示意图;
图2是本发明中机翼收缩结构示意图;
图3是本发明中收缩骨架机构的结构示意图;
图4是本发明中实施例二中收展驱动部件的安装结构示意图;
图5是本发明中脱离装置的结构示意图。
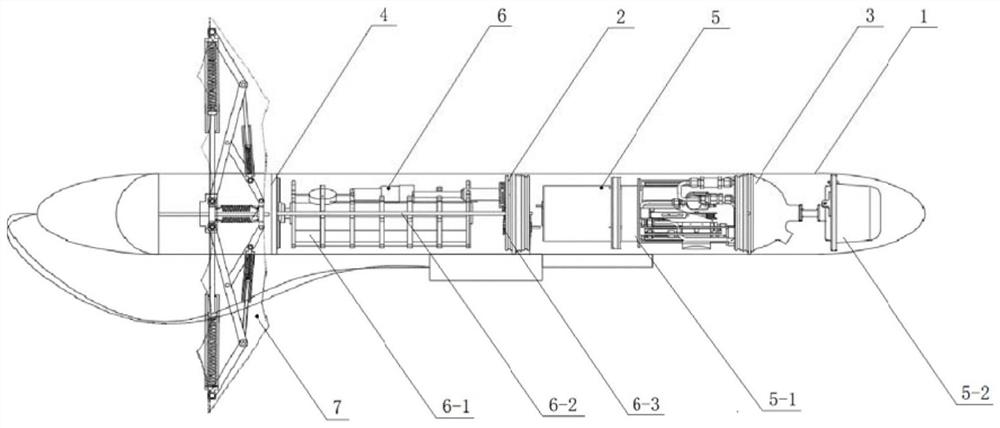
图中、1、舱体;2、肋环;3、半球形前端盖;4、半球形后端盖;5、浮力控制系统;5-1、内油箱总成;5-2、外油囊总成;6、电池以及俯仰调节组件;6-1、电池包;6-2、滚转调节机构;6-3、俯仰调节机构;7、收展骨架机构;7-1、基架;7-2、第一收展支杆;7-3、第二收展支杆;7-4、活块;7-5、第一销轴;7-6、第二销轴;7-7、第三销轴;7-8、收展弹簧;7-9、第一恢复弹簧;7-10、第二恢复弹簧;7-11、连杆;7-12、第四销轴;7-13、第五销轴;7-14、第六销轴;7-15、丝杠;8、脱离装置;8-1、电源正极端子;8-2、电源负极端子;8-3、熔断丝;8-4、固定座;8-5、降落伞绳;8-6、脱落杆;8-7、恢复杆;8-8、恢复弹簧;8-9、固定套筒。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
为解决目前现有技术中无适用于无人机投放的水下航行器的问题,本发明特提供一种空投式水下航行器,本航行器中的机翼不易在空投后受损,保证航行器入水后正常工作。为了进一步说明本发明的结构,结合附图详细说明书如下:
实施例一
请参阅图1-图3,一种空投式水下航行器,包括航行器主体,航行器主体是指除机翼之外的构成具有航行器基本功能的其它部件的总成。航行器主体具有舱体1,舱体1是航行器主体的外部壳体,其内部为用于装载其它部件的舱室。本实施例中,舱体1由两段壳体组成,两段壳体构成圆柱形的壳体,壳体的前端为圆弧状的导流构造。前段壳体的内侧为浮力控制舱,后段壳体的内侧为能源以及姿态调节舱。两段壳体之间通过肋环2连接,在浮力控制舱前部安装有半球形前端盖3,在能源以及姿态调节舱的后部安装半球形后端盖4,半球形前端盖3和半球形后端盖4之间形成密封的耐压腔室。
浮力控制舱内集成安装浮力控制系统5,水下航行器的浮力控制系统5或称浮力调节装置为常规已知技术。本实施例中,所装载的浮力控制系统5主要包括液压油路、内油箱总成和外油囊总成5-2。内油箱总成5-1位于具有负压的密封的耐压腔室中,且安装在半球形前端盖3后部。内油箱总成5-1主要包括内油箱、油泵、电机和电磁阀等部件。外油囊总成5-2安装在耐压腔室的外侧,位于航行器的前端。通过油液在内油箱总成5-1和外油囊总成5-2之间的转移来实现浮力调节。当航行器需要上浮时,电机通驱动油泵从内油箱中将油液排出至外油囊总成,使航行器前端浮力增加,在动力单元推动作用下航行器可实现上浮动作。当航行器需要下潜时,控制回油的电磁阀打开,在耐压腔室内侧负压作用下,油液从外油囊总成回流至内油箱总成,使航行器前端前端浮力下降,航行器可完成下潜动作。
舱体1的能源以及姿态调节舱中安装有电池以及俯仰调节组件6,电池以及俯仰调节组件6同样为已公开的技术,其具体结构以及工作原理在本项目组在先申请的多项专利中均已经公开,例如CN202010505631.4中所公开的相关内容。电池以及俯仰调节组件6包括电池包6-1、滚转调节机构6-2和俯仰调节机构6-3。电池包6-1的重心在航行器中心轴以下,可以增加航行器的稳定性。俯仰调节机构6-2包括导轨、丝杠螺母、丝杠和俯仰电机。俯仰电机带动丝杠转动,从而实现电池包6-1在导轨上滑动,调整航行器的重心位置,进而控制航行器的俯仰角。
滚转调节机构6-3固定在肋环4上,包括滚转电机以及啮合齿轮。啮合齿轮包括小齿轮和大齿轮,大齿轮固定在导轨上,小齿轮与滚转电机连接,滚转电机带动小齿轮转动,通过齿轮啮合带动导轨以及电池包转动,调整空投水下航行器的滚转姿态,进而进行控制。
航行器主体安装有可收展的机翼。本实施例中,机翼包括收展骨架机构7和设于收展骨架机构7外侧且由收展骨架机构7支撑柔性蒙皮。具体的,舱体1具有沿舱体1的中轴方向延伸的槽口,收展骨架机构7安装在此槽口中,收展骨架机构7通过自身的收缩可收入舱体1内侧,收展骨架机构7通过自身的展开可形成舱体外侧的机翼。柔性蒙皮形成展开的机翼的翼面。
本实施例中,在舱体1的后部具有艉部壳体,艉部壳体位于半球形后端盖4的后方,且在半球形后端盖4的后方形成用于安装收展骨架机构7的腔室。
收展骨架机构7包括基架7-1、第一收展支杆7-2和第二收展支杆7-3。基架7-1是位于舱体轴线位置的、沿舱体轴线直线延伸的直线导杆,基架7-1的前端利用紧固件固定在半球形后端盖4上。第一收展支杆7-2和第二收展支杆7-3为直杆。
基架7-1安装可沿基架长度方向直线活移的活块7-4,活块7-4具有与基架7-1横断面适配的导向孔,活块7-4通过导向孔配装在基架7-1上,活块7-4可沿舱体1的轴线直线活移。第一收展支杆7-2的内端与基架7-1通过第一销轴7-5铰接,第二收展支杆7-3的内端通过第二销轴7-6铰接活块,第一收展支杆7-2和第二收展支杆7-3通过第三销轴7-7铰接。第一销轴7-5、第二销轴7-6和第三销轴7-7的轴线平行且与舱体1的轴线垂直。通过活块7-4的活移,第一收展支杆7-2与基架7-1之间的夹角以及第二收展支杆7-3与基架7-1之间的夹角可改变。实现基架7-1、第一收展支杆7-2和第二收展支杆7-3围构的三边形框架可整体收缩至舱体1内侧或部分展开出舱体1外侧。具体的,活块7-4向舱体1后方活移,第一收展支杆7-2与基架7-1之间的夹角以及第二收展支杆7-3与基架7-1之间的夹角可变小,基架7-1、第一收展支杆7-2和第二收展支杆7-3围构的三边形框架可整体收缩至舱体1内侧;活块7-4向舱体1前方活移,第一收展支杆7-2与基架7-1之间的夹角以及第二收展支杆7-3与基架7-1之间的夹角可变大,基架7-1、第一收展支杆7-2和第二收展支杆7-3围构的三边形框架的大部分至舱体1外侧,形成舱体外侧的机翼。
基架7-1安装控制活块7-4活移的收展驱动部件。本实施例中,收展驱动部件为安装在基架7-1上的收展弹簧7-8,收展弹簧7-8为拉簧,在活块7-4一侧圆周方向对称设置两收展弹簧7-8,收展弹簧7-8的一端连接活块7-4,收展弹簧7-8的另一端连接基架7-1前端,此基架7-1前端也是第一销轴7-5的铰接处。收展弹簧7-8对活块7-4施加靠近第一收展支杆7-2内端的力。收展弹簧7-8处于自由状态下,是机翼的展开状态。本实施例中的机翼收缩状态依靠外力实现并由外侧辅助的绑带维持,具体的,在航行器投放之前,手动按压机翼至收缩状态,将收缩状态的机翼利用水解绷带束缚。航行器投入水中之后,水解绷带水解,对收缩状态的机翼的束缚失效,在收展弹簧7-8的拉力作用下,机翼在水中改变为展开状态。
本实施例中,收展骨架机构7包括至少一个与三边形框架同平面的收展三角框架单元。收展三角框架单元的设置可提高机翼的整体强度,还可以令机翼尺寸以及面形设计具有更多选择性。三角收展框架单元由两根架杆和一根恢复弹簧通过销轴铰接围构而成,两架杆之一与活块连接。
本实施例中,具体的,第二收展支杆7-3的中部与第一收展支杆7-2的外端部通过第三销轴7-7铰接。包括第一恢复弹簧7-9、第二恢复弹簧7-10和连杆7-11,第一恢复弹簧7-9的一端与第二收展支杆7-3的外端通过第四销轴7-12铰接,第一恢复弹簧7-9的另一端与第一收展支杆7-2的中部通过第五销轴7-13铰接。第二收展支杆7-3自第三销轴7-7外侧的一段杆体作为一根架杆、第一收展支杆7-2自第五销轴7-13外侧的一段杆体作为另一架杆,两根架杆与第一恢复弹簧7-9形成上述的收展三角框架单元。第二收展支杆7-3的外端部与连杆7-11的一端通过第四销轴7-12铰接,连杆7-11的另一端与第二恢复弹簧7-10的端部通过第六销轴7-14铰接,第二恢复弹簧7-10的另一端部与活块7-4通过第二销轴7-6铰接。第二收展支杆7-3作为一根架杆,连杆7-11作为另一根架杆,两条架杆与第二恢复弹簧7-10形成另一收展三角框架单元。
航行器主体安装降落伞单元。降落伞单元包括主伞和副伞,所述主伞和副伞通过脱离装置8安装在所述航行器主体上。可以通过降落伞单元将下落的航行器减速至安全入水速度。
请参阅图5,本实施例中,脱离装置8包括电源正极端子8-1、电源负极端子8-2、熔断丝8-3、固定座8-4、降落伞绳8-5、脱落杆8-6、恢复杆8-7、恢复弹簧8-8和固定套筒8-9。降落伞绳8-5的外端连接主伞和副伞,降落伞绳8-5的内端连接脱落杆8-6。其中固定座8-4和固定套筒8-9固定在航行器的舱体1后端内侧,固定座8-4和固定套筒8-9的安装处均做绝缘处理。电源正极端子8-1穿过固定座8-4的端部通孔伸入固定座8-4,电源负极端子8-2安装在固定座8-4上且与固定座8-4电连接,电源正极端子8-1和电源负极端子8-2与电池包6-1电连接,熔断丝8-3的一端与电源正极端子8-1连接,熔断丝8-3的另一端与恢复杆8-7穿入固定座8-4中的一端连接,穿入固定座8-4的恢复杆8-7与固定座8-4之间导电。恢复杆8-7穿入固定座8-4,熔断丝8-3串接于电源正极端子8-1和电源负极端子8-2之间的电路回路,且电路回路中安装控制回路通断的电磁控制开关。恢复杆8-7的另一端与恢复弹簧8-8连接,恢复杆8-7可沿着固定座8-4的轴线移动。脱落杆8-6穿入固定套筒8-9中,脱落杆8-6上的孔与固定套筒8-9上的孔同心对正,恢复杆8-7贯穿脱落杆8-6的孔与固定套筒8-9的孔。恢复弹簧8-8与航行器舱体1内壁固连。电磁控制开关控制电路回路通电后,熔断丝8-3熔断,在恢复弹簧8-8的作用下,恢复杆8-7自脱落杆8-6的孔中抽出,带降落伞绳8-5的脱落杆8-6自航行器尾端脱离。上述结构的脱离装置仅仅是本实施例中所选用的一种结构方式,并不是对脱离装置的唯一限定,常规技术中能够实现自动脱离的其它装置结构,均可用于本航行器。
实施例二
本实施例中,与实施例一所述技术方案的唯一区别特征为收展驱动部件的结构设计,除收展驱动部件的结构设计之外,本实施例中其它部件的结构以及安装方式均与实施例一中相同,故在本实施例中不做赘述。
请参阅图4,收展驱动部件为丝杠电机组件,活块7-4通过矩形导向孔配装在基架7-1上,在活块7-4上还设有与矩形导向孔同轴线的螺纹孔。丝杠7-15安装基架7-1的侧方且与基架平行,基架7-1可绕自身轴线转动且通过相适配的电机驱动,丝杠7-15与活块7-4通过螺纹连接,转动的丝杠7-15可驱动活块7-4活移。以此实现机翼收展的电动控制。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种空投式水下航行器
- 一种空投式海洋数据测量装置和空投系统