自动车辆安全停车地带的地图绘制系统
文献发布时间:2023-06-19 11:30:53
本申请是申请日为2017/9/18,申请号为201710841191.8,题为“自动车辆安全停车地带的地图绘制系统”的发明专利申请的分案申请。
技术领域
本公开通常涉及安全停车地带的地图绘制(mapping)系统,且更具体地涉及配置为当发生紧急情况时将主车辆导航到安全停车地带中的系统。
背景技术
当由于例如车辆中的医疗紧急状况或机械故障而需要车辆靠边停车或以其它方式停车时,情况出现。当自主车辆可能要求操作人员承担车辆的手动控制,但由于例如操作人员无法行动,操作人员缺乏操作车辆的技能而可能没有准备好接管控制或可能不能够接管控制时,情况也出现。
发明内容
根据一个实施例,提供了一种适于在自动车辆上使用的安全停车地带的地图绘制系统。该系统包括数字地图和控制器。该数字地图指示适于主车辆行驶的行驶路径。该数字地图还指示接近行驶路径的安全停车地带。控制器与数字地图通信。该控制器配置为发生紧急情况时将主车辆导航到安全停车地带中。
通过阅读优选实施例的下列详细描述并参考各个附图,进一步的特征和优点将更加显而易见,优选实施例只是作为非限制性示例给出。
附图说明
现在,将参考附图通过示例的方式来描述本发明,附图中:
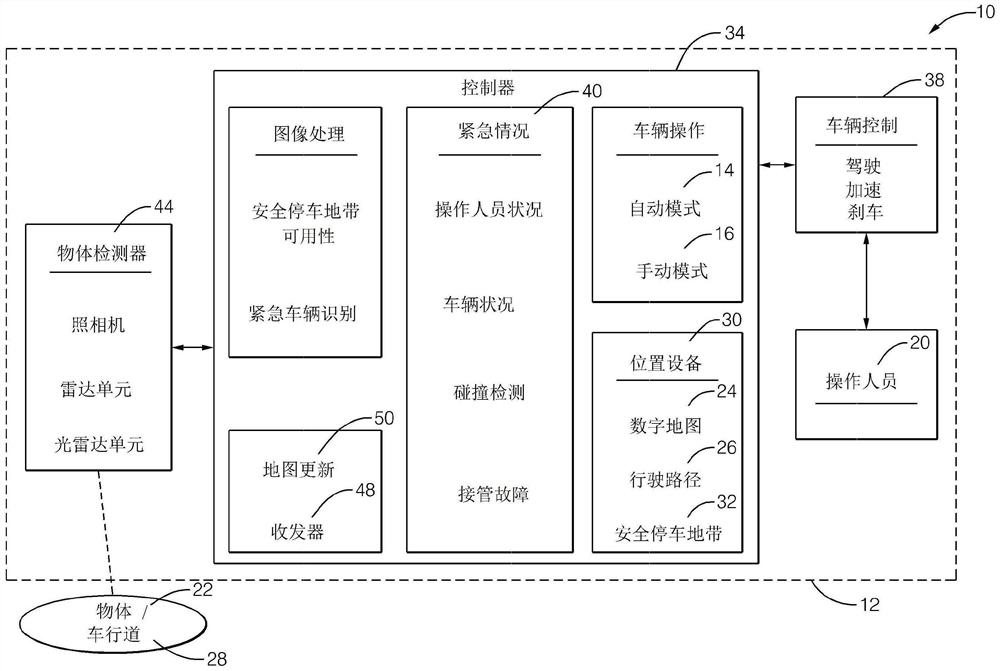
图1是根据一个实施例的安全停车地带的地图绘制系统的示图;以及,
图2是根据一个实施例的图1的系统所遇到的交通场景。
具体实施方式
图1示出了适合于在自动车辆(例如主车辆12)上使用的安全停车地带的地图绘制系统10(下文称为系统10)的非限制性示例。本文中所呈现的一些示例通常涉及当主车辆12正以自动模式14(即,完全自主模式)操作时的实例,其中主车辆12的操作人员20可能仅指定目的地以便操作主车辆12。然而,预期的是,当主车辆12以手动模式16操作时,本文所呈现的教导是有用的,在手动模式下,自动化的程度或水平可能仅仅向通常控制主车辆12的驾驶、加速和刹车的操作人员20提供驾驶建议。例如,系统10可能仅仅在需要时帮助操作人员20以变道和/或避免与例如诸如其他车辆之类的物体22的干扰和/或碰撞。
该系统包括数字地图24,其可被存储在主车辆12上或存储在主车辆12中,或者可被远程存储“在云中”且通过诸如专用短距离通信(DSRC)之类的多种无线通信协议来访问,如将被本领域技术人员认识到的那样。数字地图24通常配置为或者用于指示适于主车辆12行驶的行驶路径26(图2),例如车行道28。为了导航行驶路径26,系统10可以包括位置设备30,该位置设备是诸如能用于确定数字地图上主车辆12的位置或定位的全球定位系统接收器。可替代地,系统10可以使用诸如光学识别接近于主车辆12的景观的各个特征和/或与各个基础设施收发器进行DSRC通信之类的其他手段,来确定数字地图24上主车辆12的位置或定位。数字地图24可包括诸如车行道28的车道宽度和/或限速之类的有关车行道28的信息。
已认识到会出现如下情况,即行驶时需要或优先使得主车辆12应该停车,即,离开车行道28的行驶部分而靠边停车。然而,认识到,只停车同时仍然占用车行道28的车道通常将是不安全的。因此,本文中所描述的数字地图24是相对于先前示例的改进,因为数字地图24还指示接近(即,邻近或靠近)行驶路径26的安全停车地带32。正如本文使用的,安全停车地带32可以是但不限于车行道28的路肩36。安全停车地带32的替代示例包括但不限于出口匝道、休息区、停车场和具有平行停车点的侧街道。安全停车地带32通常可以以诸如如下的许多方式进行表征:足够大的以便停车而不产生相对于其他车辆的危险情况的地带或区域;不会增加交通堵塞的停车区域;将发生最小量的堵塞和危险的区域;不会阻碍至主车辆12的无线通信的区域;避免非法地带和非停车时间的车行道28侧边的安全停车区域;安全高速公路的中央车道和侧车道;以及足够大的以容纳主车辆12的公路的侧边或路肩区域。
该系统包括与数字地图24通信的控制器34。该控制器34可包括诸如微处理器或其他控制电路之类的处理器(未具体示出),所述其他控制电路诸如是包括用于处理数据的专用集成电路(ASIC)的模拟控制电路和/或数字控制电路,正如对本领域技术人员而言应显而易见的。控制器34可包括存储器(未具体示出),该存储器包括非易失性存储器,诸如用于存储一个或多个例程、阈值和所捕捉数据的电可擦可编程只读存储器(EEPROM)。该一个或多个例程可由处理器执行以实施用于确定相对于在行驶路径26上主车辆12的当前位置的安全停车地带32的位置的步骤。如果数字地图24是控制器34的部分或者位于控制器34内,则控制器34和数字地图24之间的通信可通过有线方式进行;或者如果数字地图24位于“云中”,则控制器34和数字地图24之间的通信可通过无线通信方式进行。
控制器34可配置为通常沿着行驶路径26导航主车辆12,且自动化程度确定控制器34采取何种步骤来导航主车辆12。例如,如果主车辆12正以自动模式14运行,则控制器34可以完全控制车辆控制38,使得操作人员20仅仅是主车辆的乘客且主车辆12的导航包括运行主车辆12的驾驶、加速和刹车的控制器34。然而,如果主车辆12正以手动模式16运行,则在目的地已指定的情况下,控制器34可以仅仅给与主车辆12的当前位置对应的地图的显示提供逐向(turn-by-turn)导航。
由于数字地图24包括有关一个或多个安全停车地带32实例的位置的信息,所以控制器34有利地配置为当紧急情况40发生时将主车辆12导航到安全停车地带32中。如本文中所用的,紧急情况40可以是但不限于:当操作人员20因遭受晕动病而需要主车辆12停止时的情况(操作人员状况);当主车辆12遇到机械故障(例如,爆胎)应被修理而不是继续行驶时的情况(车辆状况),或者主车辆12和物体22碰撞后从而主车辆12在继续行驶前应被检查(碰撞检测)。通过例如操作人员20发布诸如“靠边并停车”或“寻找安全地方停车”之类的口头指令,可以向控制器34报告或指示操作人员状况。
一旦紧急情况40被指示至控制器34或由控制器34检测到,控制器34就将主车辆12导航到安全停车地带32中。如果主车辆12正以自动模式14运行,则控制器34可以通过自主运行车辆控制38将主车辆导航到安全停车地带32中。如果主车辆12正以手动模式16运行,则控制器34可以在操作人员20可见的导航显示屏(未示出)上显示一个或多个安全停车地带32的实例的位置,和/或向操作人员20发布诸如“安全停车地带在两百米外的右侧”和/或“驶上路肩然后停车”之类的可听通知。
预期的是,当指定为安全停车地带32的实例的区域可能意外地被例如其他车辆、建筑设施或临时标记42(图2)占用时,情况可出现。为了确定安全停车地带32的实例可被主车辆所使用,系统10可包括诸如照相机、雷达单元、光雷达单元或任何它们的组合之类的图像设备44。控制器34可使用图像设备44以确定主车辆12将进入的安全停车地带32是否能被主车辆12所使用。例如,如果图像设备44检测到数字地图24指示的路肩36的一部分中的临时标记42的存在是安全停车地带32的实例或实例的一部分时,则控制器34可配置为寻找安全停车地带32的下一个实例,或者寻找安全停车地带32的什么部分是空置的(clear),从而能被主车辆12使用。
控制器34可进一步配置为当安全停车地带32(或其一部分)不能使用(例如,已被占用)时更新数字地图24。例如,控制器34更新数字地图24以指定临时标记42所位于的路肩36的一部分作为非可用地带46。如果数字地图24存储“在云中”,则系统10可包括配置为向数字地图24发送有关非可用地带46的检测的地图更新50的收发器48。
还预期到,当主车辆12正以自动模式14运行时,但出于本领域技术人员所认识的很多原因中的任何一个,可建议、优选或必须将车辆操作改为手动模式16时,情况可出现。作为非限定性示例,如果数字地图24所提供的信息对于用于自动操作的传感器所观察的关于车行道的情况是不充分的,或者并不充分对应于用于自动操作的传感器所观察的关于车行道的情况,则将车辆操作改为手动模式16可能是谨慎的。然而,还预想到,当操作人员20不能承担主车辆12的控制时,情况可出现。作为非限定性示例,操作人员20可能睡着了,可能不在驾驶位上,或者以其他方式无法行动且不能承担主车辆12的控制。如此,控制器34可配置为当操作主车辆12的手动模式16不被推荐且操作人员不能承担主车辆12的控制时,继续以自动模式14操作仅足够长以将主车辆12导航(即,自主操作车辆控制38)到安全停车地带32中。
因此,提供了一种安全停车地带的地图绘制系统(系统10)、用于系统10的控制器34以及操作系统10的方法。系统10通过经由数字地图24提供关于接近或邻近主车辆12行驶的行驶路径26或车行道28的安全停车地带32的信息来提高安全性,从而使得如有必要主车辆12能快速定位且进入安全停车地带32的实例。
尽管已经根据本发明的优选实施例描述了本发明,但是并不限制于此,而是仅在所附的权利要求书所阐述的范围内为限。
- 自动车辆安全停车地带的地图绘制系统
- 自动车辆安全停车地带的地图绘制系统