一种直线电机列车驱动导向系统、方法及其轨道交通系统
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及轨道交通技术领域,具体而言,涉及一种直线电机列车驱动导向系统、方法及其轨道交通系统。
背景技术
现有轨道交通车辆中采用直线电机驱动有常规的直线电机车辆和中低速磁浮车辆,其共同点是反应轨道采用沿纵向敷设的连续感应铝板,通过短定子线圈与感应板之间的电磁吸力形成车辆驱动力。在其中导向方式依然是传统轮轨式轨道交通的导向方式,带来了轮轨磨耗快、噪声大的问题。
发明内容
本发明的目的在于提供一种直线电机列车驱动导向系统、方法及其轨道交通系统,以改善上述问题。为了实现上述目的,本发明采取的技术方案如下
第一方面,本申请提供了一种直线电机列车驱动导向系统,包括反应轨道和驱动件,反应轨道,所述反应轨道包括第一次级组和第二次级组,所述第一次级组包括第一反应板和第二反应板,所述第二次级组包括第三反应板和第四反应板,所述第一反应板和所述第二反应板沿着列车运行的方向排列并间隔设置,所述第三反应板和所述第四反应板沿着列车运行的方向排列并间隔设置;以及定子模块,所述定子模块包括第一线圈组和第二线圈组,所述第一次级组与所述第一线圈组平行,所述第二次级组与所述第二线圈组平行,所述第一次级组与所述第一线圈组之间产生的电磁斥力和所述第二次级组与所述第二线圈组之间产生的电磁斥力在横向水平分力方向相反。
进一步地,所述反应轨道的底部设置有承轨台,所述定子模块的顶部设置有悬架,所述悬架上设置有一对辅助限位件,两个所述辅助限位件分别设置于所述承轨台两侧,两个所述辅助限位件的水平高度低于所述承轨台的高度。
进一步地,两个所述辅助限位件与所述承轨台侧面之间设有空隙。
进一步地,所述悬架上设有行走轮,所述行走轮为无轮缘钢轮或橡胶轮。
进一步地,所述第一线圈组(21)和所述第二线圈组(22)对称设置,所述第一次级组和所述第二次级组为对称设置。
进一步地,所述第一次级组与所述第一线圈组之间产生的电磁斥力在水平方向的分力小于在竖直方向的分力。
进一步地,第一反应板、第二反应板、第三反应板和第四反应板的感应面倾斜设置。
第二方面,本申请中还提供了一种轨道交通系统,包括列车,所述列车使用所述直线电机列车驱动导向系统。
第三方面,本申请中还提供了一种列车驱动导向方法,使用所述的直线电机列车驱动导向系统,包括:获取第一信息,所述第一信息包括列车运行线路信息,所述列车运行线路信息包括列车所有需经过的曲线位置和坡道位置、列车车身长度、列车所需经过曲线的转弯半径、所需经过曲线的弧度、列车所需经过弯道的倾斜度、列车(7)所需经过的坡道的坡度;获取第二信息,所述第二信息包括列车实时速度、列车实时位置和列车车身平衡状态,所述列车实时位置为列车车头所处的实时位置,所述列车实时位置包括列车驶入曲线路段和列车驶入直线段,所述列车车身平衡状态包括列车偏离安全轨道区域和列车位于安全轨道区域;根据所述第一信息和所述第二信息建立控制数学模型,求解所述控制数学模型得到第三信息,所述第三信息包括对所述第一线圈组和所述第二线圈组的实时输出电流数值;根据所述第三信息,对于所述第一线圈组和所述第二线圈组进行电流控制。
进一步地,所述根据所述第一信息和所述第二信息建立控制数学模型,求解所述控制数学模型得到第三信息,包括:
若所述列车实时位置为列车驶入直线段,且根据所述列车车身平衡状态为列车偏离安全轨道区域信息,则实时改变所述第一线圈组和所述第二线圈组的实时输出电流为不相等数值,直到所述列车车身平衡状态为列车位于安全轨道区域,所述第一线圈组 得到电流后与第一次级组产生第一调整斥力,所述第二线圈组得到电流后与第二次级组产生第二调整斥力,所述第一调整斥力与所述第二调整斥力在横向水平方向的分力大小不同,且所述第一调整斥力与所述第二调整斥力在水平横向方向的合力指向列车位于安全轨道区域的方向;
若所述列车实时位置为列车驶入曲线路段,则根据曲线的转弯半径和列车实时速度计算曲线超高率,根据所述曲线超高率计算所述第一线圈组和所述第二线圈组的实时输出电流数值,以平衡列车通过曲线时的离心力。
本发明的有益效果为:
一、通过采用间隔设置的第一反应板、第二反应板等,将常规直线电机驱动技术中的电磁吸力变为电磁斥力,在提供驱动力的同时利用电磁斥力在导向和减轻行走轮与行走轨道支架之间的压力,相比磁悬浮技术而言又简化车辆走行部构造,通过电磁斥力并减轻车辆自重、减少高速行驶时列车空气动力学阻力和磁阻;
二、通过反应轨的感应面斜置,增强电磁力导向作用,提高导向的稳定性和可靠性,为采用无轮缘钢轮或胶轮提供条件;
三、利用反应轨道和定子模块之间竖直方向的分力,减轻行走轮与行走轨道之间的压力,为采用无轮缘钢轮、或橡胶轮,行走轮为从动状态,其对行走轨道之间无黏着要求,驱动力不受轮轨打滑限制,同时减小行走轮与行走轨道之间的压力,实现了减少轮轨摩擦力,降低运行噪声;
四、相比于磁悬浮技术,其不需要复杂的悬浮、导向控制系统,并能更简单实现电磁气隙,且不易发生磁浮常见的控制系统故障;
五、兼具高速度和低噪声优点,满足城际间通勤交通直接进入城市中心区的要求。
本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
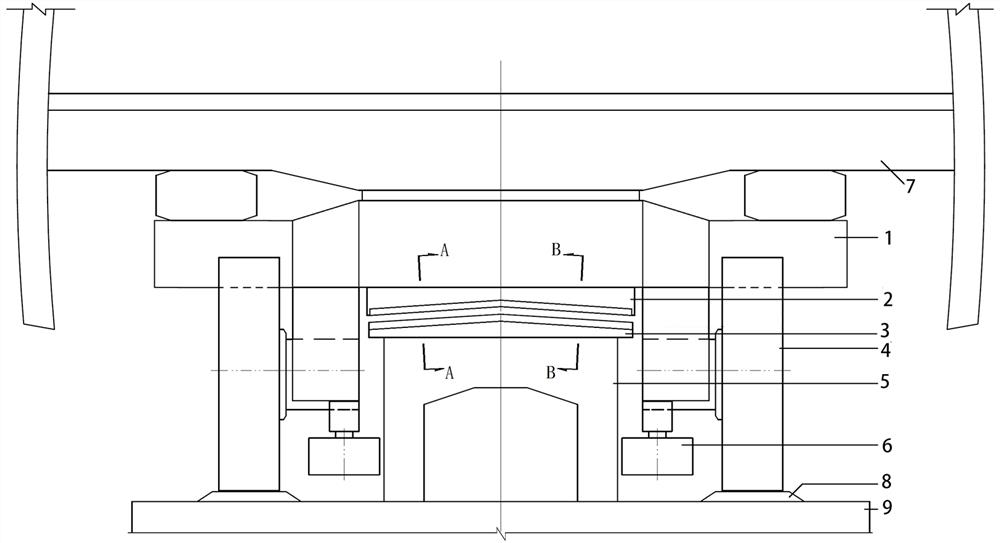
图1为本发明的实施例1的结构示意图;
图2为图1的A-A处剖面结构示意图;
图3为图1的B-B处剖面结构示意图;
图4为将本发明改造于现有技术中的结构示意图;
图5为采用不同于实施例1的所述悬架的结构示意图;
图6为本发明实施例2的结构示意图;
图7为本发明实施例3的结构示意图;
图中标记:1、悬架;2、定子模块;21、第一线圈组;22、第二线圈组;23、第三线圈组;24、第四线圈组;3、反应轨道;31、第一反应板;32、第二反应板;33、第三反应板;34、第四反应板;4、行走轮;5、承轨台;6、辅助限位件;7、列车;8、走行轨道;9、支承结构。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本发明的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
现有轨道交通车辆中采用直线电机驱动有常规的直线电机车辆和中低速磁浮车辆,其共同特点是反应轨道3采用沿纵向敷设的连续感应铝板,通过短定子线圈与感应板之间的电磁吸力形成车辆驱动力。常规直线电机车辆的导向依然是传统轮轨式轨道交通的导向方式,轮轨磨耗、噪声依然较大;中低速磁浮则靠设置专门的导向磁铁实施导向,悬浮、导向控制要求高,易发生故障。此外,上述既有技术车辆走行部相对复杂,也限制了车辆的进一步提速。
同时为了便于下文的理解,在本申请中所提及的“纵向” 为沿着线路的通长方向,“横向”为图1的水平方向,“竖向”为垂直地面的方向。
实施例1:
参见图1,图中示出了一种直线电机列车驱动导向系统,具体而言本系统包括反应轨道3和定子模块2两大部件构成直线电机驱动核心。其中,其中参见图2以及图3,反应轨道3包括第一次级组和第二次级组,第一次级组包括第一反应板31和第二反应板32,第二次级组包括第三反应板33和第四反应板34,第一反应板31和第二反应板32沿着列车7运行的方向排列并间隔设置,第三反应板33和第四反应板34沿着列车7运行的方向排列并间隔设置,在本实施例中,通过将多个反应板间隔设置,改变现有技术中采用的连续排布的方式,将常规直线电机驱动技术中的电磁吸力变为电磁斥力,电磁斥力的有益效果将在后文中阐述。同时需要说明的是,实际使用本实施例的反应轨道3为可重复单元,即在使用中为反应轨道3为沿着线路通长设置,且反应轨道3中的第一次级组不仅仅包括第一反应板31和第二反应板32,还有其余的反应板沿着线路的通长设置,本实施例中不再赘述。对于第一反应板31、第二反应板32、第三反应板33和第四反应板34可采用铝板、铝铁组合、铜铁组合或短路线圈制成,在本实施例中优选第一反应板31、第二反应板32、第三反应板33和第四反应板34为短路线圈制成,对于本领域技术人员,仍可以选用其他材料制成。
可以理解的是,在一些实施例中可以采用左右对称式的反应轨,参见图5,图5示出了一些实施中,第一次级组和第二次级组位于车体的两侧。
参见图2以及图3,图中示出了定子模块2包括第一线圈组21、第一线圈组22、第三线圈组23和第四线圈组24, 第三线圈组23和第四线圈组24分别为第一线圈组21、第一线圈组22的重复单元,第一线圈组21和第三线圈组23沿着列车7运行的方向排列并间隔设置,第一线圈组22和第四线圈组24沿着列车7运行的方向排列并间隔设置,第一次级组与第一线圈组21平行且存在间隙,第二次级组与第二线圈组22平行且存在间隙,通过以上将第一次级组与第一线圈组21之间设置间隙、第二次级组和第二线圈组22之间设置间隙,使得在使用本实施例的交通工具在运行时,减少部分无用能量消耗,即减少将交通工具向上抬升而所需的功。尤其对于采用胶轮系统的有轨列车7而言,可以降低胶轮与走行轨道8的接触面,达到减少胶轮体系运行时的噪音。同时可以将以上设置转移到现有的凸缘钢轮轨道列车7上,参见图4,通过将现有技术中的将常规直线电机驱动技术中的电磁吸力变为电磁斥力,减少凸缘钢轮与轨道的压力,降低了凸缘钢轮对轨道之间的黏着要求,驱动力不受轮轨打滑限制。
通过以上设置,在实际使用本实施例时,对第一线圈组21、第一线圈组22、第三线圈组23和第四线圈组24依次通电后,即会在定子模块2与反应轨道3之间的产生脉冲磁场并进一步产生电磁斥力,其中电磁斥力的纵向水平分力提供驱动力。
进一步地,在本实施例中,第一次级组与第一线圈组21之间产生的电磁斥力和第二次级组与第二线圈组22之间产生的电磁斥力在水平方向上的分力方向相反,并在第一线圈组21和第二线圈组22依次通电后为列车运行提供导向力,电磁斥力的竖向分力提供举升力,即参见图1、图5、图6以及图7,在本实施例中第一次级组和第二次级组的感应面均为倾斜设置。通过以上的设置,通过采用间断式排布第一次级组和第二次级组,将常规直线电机驱动技术中的电磁吸力变为电磁斥力,在提供驱动力的同时有效利用电磁斥力,将电磁斥力分为在导向和减轻轮轨压力这两方面的作用,同时感应面均为倾斜设置还可以进一步增加水平导向力,并且相对于磁悬浮而言可以简化车辆走行部构造,相对于现有技术中的直线电机同时可以有效减轻车辆作用到导轨的重力,即达到了减少高速行驶时列车7空气动力学阻力和磁阻,并且利用电机线圈与反应轨之间的法向力减轻车辆轮轨间压力。
参见图1,为了达到使用本实施例的列车7在运行时的噪声,图1中示出了,在本实施例中,反应轨道3的底部设置有承轨台5,定子模块2的顶部设置有悬架1,其中悬架1用于连接车体,并且在本实施中对于悬架1可以采用径向转向架模式或独立轮悬架1模式,悬架1上设有行走轮4,行走轮4为无动力从动行走轮4。参见图1,本实施例中还示出了走行轨道8,所述走行轨道8与行走轮4相互配合,且走行轨道8的行走面的法线与承轨台5的侧面平行。
通过利用反应轨道3和定子模块2产生驱动力而伴随着列车7运动而转动的从动轮,其能有效协助第一次级组与第一线圈组21产生间隙,第二次级组和第二线圈组22产生间隙,减少没有必要将定子模块2抬升而需要的功。同时由于反应轨道3和定子模块2可产生水平向的分力以及竖直向上的分力,其能有效减少行走轮4与走行轨道8之间的压力,即在可降低行走轮4与走行轨道8之间的黏着要求,驱动力不受轮轨打滑限制。并且由于在本实施例中对于行走轮4优选为无轮缘钢轮或橡胶轮,其能进一步减少轮轨摩擦力,降低运行噪声,满足城际间通勤交通直接进入城市中心区的要求。在本实施例中,通过行走轮4也为第一次级组与第一线圈组21之间以及第二次级组和所述第二线圈组22之间提供必要间隙,简化其为了有必要的间隙而需要进行而言的电磁设置,简化了车辆的结构,同时倾斜的定子模块2又能与反应轨道3产生向上的托举力,有效的缩减了走行轮4与走行轨道8之间压力,两者相辅相成兼具高速度和低噪声优点,满足城际间通勤交通直接进入城市中心区的要求。
进一步地,第一次级组与第一线圈组21之间产生的电磁斥力和第二次级组与第二线圈组22之间产生的电磁斥力在水平方向上的分力方向相反,可以通过改变第一次级组与第一线圈组21之间产生的电磁斥力大小和第二次级组与第二线圈组22之间产生的电磁斥力大小,实现电磁力导向作用,提高导向的稳定性和可靠性,为采用无轮缘钢轮或胶轮提供条件。同时需要说明的是,关于本实施例中反应轨道3和定子模块2是通过向定子模块2输入电流产生主动磁场,反应轨道3产生感应电流回应并同时产生磁场,其中由于反应轨道3所产生的是逆主动磁场,即反应轨道3和定子模块2产生的斥力以及向前的驱动力。
参见图1,为了应对于关于本实施例发生故障时,能有效保证车辆在惯性作用下前进过弯时,能实现转弯拐向。图1中示出反应轨道3的底部设置有承轨台5,定子模块2的顶部设置有悬架1,悬架1上设置有一对辅助限位件6,两个辅助限位件6分别设置于承轨台5两侧,两个辅助限位件6的水平高度低于承轨台5的高度。具体而言,在本实施例中的优选辅助限位件6为导向轮,本实施例中通过设置辅助限位件6,其辅助限位件6在起故障情况下防止车辆偏位的备用性导向作用,同时为了本实施例在正常运行条件下,辅助限位件6不会对本实施例的正常运行造成影响,在本实施例中,优选两个辅助限位件6与承轨台5之间设有空隙的实质方式。
同时,为了使得在本实施例在正常运行时,降低对本实施例的第一线圈组21和第二线圈组22的控制电流的计算复杂程度,即在本实施例在直线运动中能实现降低控制电流计算量的目的,在本实施例中优选为第一次级组和第二次级组为对称设置。通过对称设置,在直线运动时,只需提供第一线圈组21和第二线圈组22相同的控制电流即可。并且为了使得本实施例适应于直线运行条件较多情况,即降低产生无意义的水平分力而需消耗的能量。参见图1,第一反应板31、第二反应板32、第三反应板33和第四反应板34的感应面的与地面夹角小于45度,换而言之,第一次级组与第一线圈组21之间产生的电磁斥力在水平方向的分力小于在竖直方向的分力。即通过以上设置,第一次级组与第一线圈组21之间产生的电磁斥力和第二次级组与第二线圈组22之间产生的电磁斥力都将大部分转化为竖直向上的托举力。在直线运行条件较多的情况下,以上的设置方式能有效的减少产生水平分力而需要的能量。
实施例2:
参见图6,在本实施例中为了应对于对安全性要求更高的运行环境,如图6中所示,第一次级组和第二次级组之间的夹角小于90度,即第一次级组与第一线圈组21之间产生的电磁斥力在水平方向的分力大于在竖直方向的分力,第二次级组与第二线圈组22之间产生的电磁斥力在水平方向的分力大于在竖直方向的分力。在这些实施例中,第一次级组与第一线圈组21、第二次级组与第二线圈组22之间产生的电磁斥力将能提供更大的向心力以实现重载荷的列车7实现过弯道。同时为了实现进一步将列车7的行驶位置固定于轨道上,减少当本实施例发生故障时,能减少出轨的几率,在本实施例中,第一线圈组21在竖直面的投影长度的两倍大于行走轮4之间的距离的二分之一,通过以上的设置使得在本实施例发生故障时,本实施例的本体结构也能够起到限位作用,减少列车7冲出行走轨道的几率。
实施例3:
参见图7,本实施例中是为了提供一种在现有轨道结构上可以运行的直线电机列车驱动导向系统。在本实施中着重为了解决凸缘钢轮在行驶的过程中具有较大噪声的问题,在本实施例中,实现了在传统的行走轨道基础上实现直线电机的改造使用,降低部分线路的改造成本。
具体而言,在本实施例中,当列车7的行走轮4采用无凸缘钢轮时,走行轨道8可采用超高强混凝土轨道;当行走轮4采用橡胶轮胎时,走行轨可采用普通高强混凝土轨道;当行走轮4采用普通钢轮时,走行轨采用普通钢轨,即图7所示的行走轮4。而与行走轨道相配合并设置于承轨台5下方的支承结构9根据线路敷设方式,可为路基、桥梁或隧道底板构成,其中承轨台5和支承结构9的两侧面相互平行,而线路曲线和超高则由支承结构9和承轨台5配合形成。
实施例4:
本实施中提供了一种使用实施例1到实施例3的列车7驱动导向方法,使用了实施例1到实施例3的直线电机列车驱动导向系统。
具体而言,包括:
获取第一信息,所述第一信息包括列车(7)运行线路信息,所述列车(7)运行线路信息包括列车(7)所有需经过的曲线位置和坡道位置、列车(7)车身长度、列车(7)所需经过曲线的转弯半径、所需经过曲线的弧度、列车(7)所需经过弯道的倾斜度、列车(7)所需经过的坡道的坡度;
获取第二信息,所述第二信息包括列车(7)实时速度、列车(7)实时位置和列车(7)车身平衡状态,所述列车(7)实时位置为列车(7)车头所处的实时位置,所述列车(7)实时位置包括列车(7)驶入曲线路段和列车(7)驶入直线段,所述列车(7)车身平衡状态包括列车(7)偏离安全轨道区域和列车(7)位于安全轨道区域;
根据所述第一信息和所述第二信息建立控制数学模型,求解所述控制数学模型得到第三信息,所述第三信息包括对所述第一线圈组(21)和所述第二线圈组(22)的实时输出电流数值;
根据所述第三信息,对于所述第一线圈组(21)和所述第二线圈组(22)进行电流控制。
其中,所述根据所述第一信息和所述第二信息建立控制数学模型,求解所述控制数学模型得到第三信息,包括:
若所述列车(7)实时位置为列车(7)驶入直线段,且所述列车(7)车身平衡状态为列车(7)偏离安全轨道区域信息,则实时改变所述第一线圈组(21)和所述第二线圈组(22)的实时输出电流为不相等数值,直到所述列车(7)车身平衡状态为列车(7)位于安全轨道区域,所述第一线圈组(21) 得到电流后与第一次级组产生第一调整斥力,所述第二线圈组(22)得到电流后与第二次级组产生第二调整斥力,所述第一调整斥力与所述第二调整斥力在横向水平方向的分力大小不同,且所述第一调整斥力与所述第二调整斥力在水平横向方向的合力指向列车位于安全轨道区域的方向;
若所述列车(7)实时位置为列车(7)驶入曲线路段,则根据曲线的转弯半径和列车(7)实时速度计算曲线超高率,根据所述曲线超高率计算所述第一线圈组(21)和所述第二线圈组(22)的实时输出电流数值,平衡列车通过曲线时的离心力。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 一种直线电机列车驱动导向系统、方法及其轨道交通系统
- 一种直线电机列车驱动导向方法及其轨道交通系统