用于对机器人操作进行编程的支持装置
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种用于编程的支持装置,其适合于工业机器人的操作的程序。
背景技术
在专利文献(日本特开专利公报2018-51653)中描述了支持装置,该支持装置与机器人的图像重叠的方式显示机器人的移动轨迹、机器人的初始位置以及机器人的目标位置的视觉识别图,以使操作者识别机器人的移动。
对机器人的命令指令通常包括使机器人移动的移动指令和使机器人待机的非移动指令。当在专利文献中描述的装置用作对机器人操作进行编程的支持装置的情况下,这种装置具有以下问题。由于机器人的程序通常在机器人按照移动指令移动之后包括多个不移动指令,因此操作者难以识别多个不移动指令,因为表示不移动指令的许多的图聚集并彼此重叠。
发明内容
本发明的目的是当通过使用用于编程的支持装置中的图来显示在这种不移动指令时使操作者识别不移动指令的内容。
第一发明是一种支持装置,其具有示出与机器人的移动相对应的移动轨迹的显示器,并且支持创建包括移动指令和非移动指令的程序。第一发明的支持装置具有:第一操作部,其示出与初始位置和目标位置重叠的移动轨迹;以及第二操作部,其示出在目标位置处动作的非移动指令的数量。
根据第一发明,在显示器上示出了与机器人的实际移动相对应的机器人的移动轨迹。所述支持装置支持通过使用显示器来提供包括移动指令和非移动指令的程序。
由于第一操作部通过使用第一代码表示移动指令的目标位置,所以操作者仅通过找到第一代码的位置就可以识别移动轨迹中的目标位置。由于第二操作部通过使用第二代码表示在目标位置处的非移动指令的数量,所以操作者仅通过找到第二代码就可以识别非移动指令被执行了多少次。因此,有效地避免了表示非移动指令的对应含义的许多图彼此聚集和重叠的情况,因此操作者可以识别出非移动指令被执行了多少次。
由于第二发明具有第二代码,第二代码表示与非移动指令的数量相对应的数字,因此操作者可以了解非移动指令被执行了多少次。
在多个移动指令的目标位置相同并且成为共同目标位置的情况下,在移动指令完成后的任何时间难以示出在共同目标位置处所进行的非移动指令。
第三发明的第二操作部通过使用第二代码并通过与移动指令相对应地示出在共同目标位置处所进行的非移动指令的数量。因此,通过使用第二代码示出在每个移动指令之后被执行的非移动指令的数量,因此操作者可以了解在相应的移动指令之后非移动指令被执行了多少次。由于该第三方案也没有使用尽可能多的图(每个图对应于多个非移动指令),所以可以避免在共同目标位置处显示多个图的这种情况。
第四发明的第二操作部以使第二代码的一部分彼此重叠的方式表示与多个移动指令相对应的多个第二代码,从而可以限制示出多个第二代码的区域,并且操作者可以识别多个第二代码中的每一个。
第五发明的第二操作部以使多个第二代码按时间顺序布置的方式表示多个第二代码。因此,操作者可以在多个移动指令中的每一个完成之后识别如何操作非移动指令。
第六发明的第二操作部能够在共同目标位置处选择第二代码,并且第二操作部还能够编辑所选择的第二代码的移动顺序以及非移动顺序。在操作者想要编辑移动指令以移动共同目标位置以及在之后执行的非移动指令的情况下,操作者可以选择相应的第二代码,使得操作者可以容易地编辑移动指令和非移动指令。
第七发明的用于编程的支持装置具有第三操作部,第三操作部通过使用第三代码示出目标位置的数量,其中目标位置与共同目标位置相同。因此,操作者可以通过寻找第三代码来识别移动非移动指令完成的共同目标位置多少次。
第八发明的第三操作部能够选择第三代码,并且在选择了所述第三代码的情况下,第八发明的第二操作部示出与移动到共同目标位置的移动指令有关的非移动指令的数量。因此,当操作者想要了解在共同目标位置处执行的非移动指令的细节时,操作者可以选择第三代码。
第九发明的第二操作部通过使用第二代码示出在共同目标位置处的非移动指令的总和。操作者可以识别在共同目标位置处被执行的非移动指令。
第十发明的第二操作部能够选择第二代码,并且在选择第二代码的情况下,第二操作部示出与移动到共同目标位置的移动指令有关的非移动指令。因此,操作者可以了解共同目标位置处的非移动指令的细节。
第十一发明的第二操作部描述了与在目标位置处被执行的非移动指令的总和相对应的数字、以及与执行中的非移动指令的时间顺序相对应的数字。因此,操作者可以识别共同目标位置处的非移动指令的总数和执行中的非移动指令的时间顺序。
第十二发明的显示器能够从各个视点示出移动轨迹,并且即使在视点改变的情况下,第十二发明的第二操作部也将第二代码示出为正视图。因此,操作者可以通过使用移动轨迹的各种视点来进行编程。操作者还可以通过使用第二代码来识别非移动指令的数量。
附图说明
图1是机器人系统的框图。
图2是示出编程过程的流程图。
图3示出了程序的一部分。
图4示出了机器人、移动轨迹和目标位置。
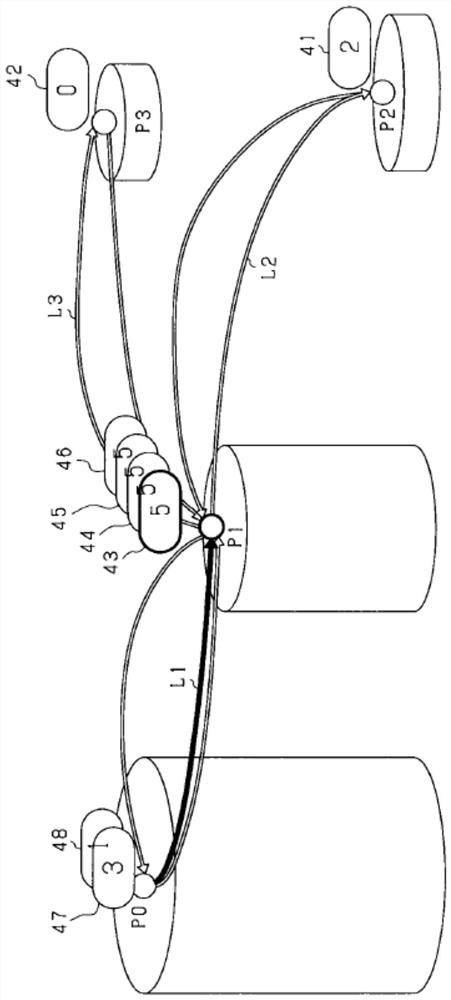
图5示出表示移动轨迹和目标位置的点以及表示非移动指令的数量的图标。
图6示出示教器的显示的示例。
图7示出动作中的机器人的移动。
图8示出第二实施例的移动轨迹和图标。
图9示出第三实施例的移动轨迹、图标和表格。
图10示出变型的第三实施例。
具体实施方式
(第一实施例)
在下文中将说明应用在工厂中使用的工业机器人的本发明的第一实施例。如图1所示,机器人系统包括机器人10、控制器20和示教器30。
机器人10是多关节机器人。机器人10具有多轴(例如6轴)臂(多关节臂),每个轴臂由安装在每个臂中的电机驱动。由机器人10传送的工件通过位于最后的(第六)轴臂的端部处的手抓取。
机器人10的控制器20包括具有CPU、ROM、RAM以及输入和输出接口的微型计算机。控制器20通过使用安装在RAM中的程序来控制机器人10。这种程序由操作者安装。控制器20还通过来自操作者操作的示教器30的命令指令来控制机器人10。
控制器20具有与机器人10的移动相关的信息,诸如目标位置以及朝向目标位置的移动轨迹。由于控制器20完成程序,因此控制器20具有执行中的程序的信息和下一个操作程序的信息。控制器20将机器人10的移动的信息输出到示教器30。
示教器30包括与控制器20相同的微型计算机、各种按键开关和显示器31(图6所示)。操作者通过使用按键开关来输入信息。操作者还通过使用显示器31上所示的图标来输入信息,因此显示器31是触摸面板。
操作者可以通过操作示教器30来创建程序,从而示教器30是用于对机器人操作进行编程的支持装置。示教器30基于所创建的程序和由控制器20控制的机器人10的移动,来产生仿真图像和移动轨迹L1-L3(图4所示)。示教器30在显示器31上示出仿真图像和移动轨迹L1-L3。示教器30具有第一操作部、第二操作部和第三操作部。
图2示出了用于完成程序的工序的流程图。操作者通过使用示教器30来完成图2所示的这些工序。
如图2所示,操作者首先创建并编辑程序,这样的程序包括使机器人10移动的移动指令和不使机器人10移动的非移动指令。操作者通过按时间顺序编写命令指令来创建程序,并且操作者基于第一次创建的程序的测试结果来编辑程序。
操作者随后基于机器人10的移动来示教每个目标位置。操作者通过在命令指令中直接写入目标位置或通过在仿真图像中点击目标位置来示教目标位置。
操作者随后操作程序并确认程序。操作者通过实际移动机器人10或通过在仿真图像中移动机器人10来操作并确认程序。
本发明的用于编程的支持装置支持上述工序的全部工序。即,示教器30不限于确认机器人10的移动,而是支持创建程序、编辑程序以及示教目标位置。
该程序的一部分在图3中示出。用于操作机器人10的实际程序可以具有数千行的命令指令。
“Move P1”的命令指令使机器人10的控制点(第六臂的中心点)移动到目标位置P1,从而该命令指令是移动指令。“Wait IO[10]=ON”的命令指令使机器人10待机直到输入和输出端口[10]变为On(接通),从而该命令指令是非移动指令和非判断指令。“IF I1>5Then”的命令指令确定变量I1的数量是否大于5,因此该命令指令是非移动指令和确定指令。“IO[11]=OFF”的命令指令使输入和输出端口[11]关闭,从而该命令指令是非移动指令和非判断指令。“Move P2”的命令指令使机器人10的控制点朝向目标位置P2移动,从而该命令指令是移动指令。“Else”的命令指令表示当不满足以上“IF I1>5”的命令指令时的操作,从而该命令指令是非移动指令和非判断指令。“Move P3”的命令指令使机器人10的控制点朝向目标位置P3移动,从而该命令指令是移动指令。“END IF”的命令指令表示上述的一系列命令指令的结束,从而该命令指令是非移动指令和非判断指令。
如上所述,用于机器人10的程序通常包括比移动指令更高频度的非移动指令。该程序还包括多个非移动指令,一旦机器人10移动到目标位置,所述多个非移动指令在该目标位置处被执行。
通过使用机器人10的仿真图像中的图来描述移动指令的目标位置。
图4示出机器人10、移动轨迹L1-L3以及表示目标位置P0-P3的图。图4所示的图像是创建或编辑图3中示出的程序时显示在显示器31(图6所示)上的图像的示例。
示教器30的显示器31示出了具有机器人10的图像10A的移动轨迹L1-L3。操作者可以确定显示器31上示出的移动轨迹的区域。操作者可以使用黑色圆圈P0来表示初始位置并且可以使用黑色圆圈P1-P3来表示移动指令的目标位置。因此,示教器30(第一操作部)示出了重叠在移动轨迹L1-L3上的目标位置P1-P3(黑色圆圈)。
在除了表示目标位置的黑色圆圈之外在显示器31上还示出表示非移动指令的图的情况下,多个图重叠在目标位置处,从而操作者难以区分非移动指令的细节。为了避免操作者的这种困难,本发明使用图标来示出在目标位置处被执行的非移动指令的数量。
如图5所示,图标41-48示出表示在目标位置处被执行的非移动指令的数量的数字,并且移动轨迹L1-L3和表示目标位置的白色圆圈P0-P3被示出。例如,白色圆圈P0表示机器人10抓取工件的开始位置。例如,白色圆圈P1表示被机器人10抓取的工件的产品编号被检测到的目标位置。例如,白色圆圈P2表示某个种类的工件被保持的目标位置。例如,白色圆圈P3表示不同类型的工件被保持的目标位置。机器人10的控制点按照开始位置P0-目标位置P1-目标位置P2-目标位置P1-目标位置P3-目标位置P1-目标位置P0-目标位置P1的顺序进行移动。
示教器30示出图标41-48(第二代码),该图标41-48示出表示在每个目标位置P0-P3处被执行的非移动指令的数量的数字。
位于靠近目标位置P2的椭圆形图标41具有数字“2”,其是指在目标位置P2处被执行的非移动指令的数量为二(2)。类似地,图标42表示数字“0”,其是指机器人没有在目标位置P3上执行非移动指令。图标42的数字可以是“1”,其是移动指令的“1”次操作和非移动指令的“0”次操作之和。因此,图标41、42中所示的数字表示在目标位置P2、P3处被执行的非移动指令的数量,从而操作者可以了解在目标位置P2、P3处被执行的非移动指令的数量。
由于位置P1是多个移动指令的目标位置,因此位置P1是共同目标位置。示教器30示出图标43-46,图标43-46表示在共同目标位置P1处被执行的非移动指令的数量。即,与图标41、42相同,这些图标43-46表示在每次机器人10移动到共同目标位置P1之后非移动指令被执行了多少。这些图标43-46的一部分彼此重叠。即,下一个图标位于前侧图标的右上侧,从而图标43-46按时间顺序设置位置。前面的图标43表示第一操作,最后的图标46表示第四操作。
示教器30通过改变视点在显示器上示出移动轨迹,从而操作者可以通过改变示出移动轨迹的在显示器上的视点来创建程序。在图标的视图根据视点的验证而改变的情况下,操作者可能难以把握图标的含义。为了避免操作者的这种不便,本发明中即使移动轨迹的视点改变,也不使用透视图,而始终使用图标41-48(图5所示)的正视图。
如图6所示,操作者可以在示教器的显示器31(第二操作部)上选择圆圈P0-P3以及图标41-48。所选择的程序以操作者可编辑的形式被显示在示教器30的显示器31上。当操作者按下前进按钮B1(显示器31上的触摸面板)时,程序的显示部分向前移动,另一方面,当操作者按下倒退按钮B2时,程序的显示部分向后移动。如图6所示,移动轨迹的所选择的部分和程序的所选择的部分被显示在示教器30的显示器31上。
操作者可以直接编辑在显示器31上显示的程序的所选择的部分。操作者也可以通过以操作者在显示器31上移动表示目标位置的圆圈的位置的方式改变显示器31上显示的目标位置来编辑程序的所选择的部分。当操作者移动圆圈时,程序中的目标位置从初始位置改变到新位置。
如图7所示,在示教器30的显示器31上显示机器人10的移动的仿真图像和实际图像。图7的图标49表示非移动指令以及当前执行的非移动指令的数量的总和。数字“5”是指总和为五(5),数字“2”是指当前操作指令为第二非移动指令。图7所示的显示器31仅用粗线示出了表示执行中的指令的图标49和非移动指令被执行的目标位置P1,没有示出位于靠近其他目标位置的P0、P2、P3的位置的其他图标。
上述发明具有以下效果。示教器30(第一操作部)在移动指令的每个目标位置的对应位置处显示圆圈P0-P3。示教器30也显示叠加在机器人10的移动轨迹L1-L3上的目标位置P0-P3中的每一个。因此,操作者可以通过找到圆圈P0-P3来识别移动轨迹L1-L3中的目标位置P0-P3中的每一个。
由于图标41-48表示与在目标位置P0-P3中的每一个上执行的非移动指令的数量相对应的数字,操作者可以通过找到数字来了解非移动指令被执行了多少次。
在目标位置P1是作为多个移动指令的目标位置的共同目标位置的情况下,每个图标43-46表示按照每个图标43-46的时间顺序在共同目标位置P1处执行的非移动指令的数量。因此,操作者可以了解在每个移动指令之后非移动指令被执行了多少次。由于每个非移动指令不具有表示每个非移动指令的含义的其自身的图标,因此靠近共同目标位置的图标的数量应该被限制。
一组图标43-46和另一组图标47、48以图标43-46、47、48彼此重叠的方式显示在示教器30的显示器31上,因此示出这些图标43-46、47、48的区域可被限制,并且操作者可以识别每个图标43-46、47、48。
一组图标43-46和另一组图标47、48以图标43-46、47、48按照时间顺序显示的方式被显示在示教器30的显示器31上。因此,操作者可以认知在每个移动指令之后被执行的非移动指令的含义。
可以由操作者选择示教器30的显示器31上的靠近共同目标位置P1的图标43-46,从而操作者可以选择与程序的移动指令或非移动指令相对应并且操作者可以编辑该程序的图标。因此,由于所选择的图标代表程序,所以操作者能够可视地找到操作者想要编辑的程序。
例如,如图7中所示,在示教器的显示器31上显示一对数字,其中一个数字表示在目标位置P0-P3处被执行的非移动指令的总和,另一个数字表示执行中的非移动指令的时间顺序。因此,操作者容易识别非移动指令正在执行的目标位置的位置、在该目标位置处的非移动指令的总和、以及非移动指令的进度。
机器人10的移动轨迹L1-L3从各种视点被显示在示教器的显示器31中,从而操作者可以从不同的视点使用移动轨迹L1-L3来创建程序。即使移动轨迹L1-L3改变,图标41-48也始终在显示器31上被显示为正视图,因此,无论视点如何,操作者都可以识别在图标41-48上显示的非移动指令的数量。
可以如下改变上述发明。尽管图7中所示的发明示出了一对数字,但是后者可以被去除,上述的一对数字中的一个数字表示在目标位置P0-P3处执行的非移动指令的总和,另一个数字表示执行中的非移动指令的时间顺序。
尽管在图5中图标43-46、47、48彼此重叠,但是这些图标43-46、47、48可以分别显示在显示器31上。操作者仍可以区分这些图标43-46、47、48中的每一个。
(第二实施例)
在下文中对第二实施例进行说明,主要说明与第一实施例的不同之处。与第一实施例中相同的部件不予说明,但是被赋予相同的附图标记。
如图8所示,示教器30的显示器31(第三操作部)显示表示共同目标位置P1的图标51,即,目标位置P1是多个移动指令的目标位置。图标52(第三代码)表示目标位置P1成为共同目标位置的次数。图标52上所示的数字“2”表示目标位置P1成为共同目标位置两(2)次。因此,操作者可以了解非移动指令的情况。
图标52以使操作者可以选择图标52的方式被显示在示教器30的显示器31上。当操作者选择图标52时,“Move 1”的移动指令及其图标53、以及“Move3”的移动指令及其图标54被显示在显示器31上。每个图标53、54示出与非移动指令的总和相对应的数字。图8所示的示例表示在“Move 1”的移动指令之后非移动指令被执行五(5)次、以及在“Move 3”的移动指令之后其他的非移动指令被执行五(5)次。
(第三实施例)
在下文中对第三实施例进行说明,主要说明与第一实施例的不同之处。与第一实施例相同的部件不予说明,但是赋予相同的附图标记。
如图9所示,在示教器30(第二操作部)的显示器31中显示的图标61表示在共同目标位置P1处被执行的非移动指令的总和。图标61上所示的数字“10”表示在“Move 1”的移动指令之后非移动指令的五(5)次操作与在“Move 3”的移动指令之后非移动指令的五(5)次的执行的总和。其他图标62、63、64也示出与在每个目标位置P0、P2、P3处被执行的非移动指令的总和相对应的数字。因此,操作者可以了解非移动指令的情况。
图标61以使操作者可以选择图标61的方式显示在示教器30的显示器31上。当操作者选择图标61时,“Move 1”的移动指令和“Move 3”的移动指令这两者均具有共同目标位置P1的目标位置、以及说明在各个移动指令被显示在示教器30的显示器31上之后执行的非移动指令的表格。图9的表格说明在“Move 1”的移动指令是“Wait 100”(“等待100”)、第二非移动指令是“bifurcation”(“分支”)之后的第一非移动指令、以及在“Move 3”的移动指令是“Wait 100”(“等待100”)之后的第一非移动指令。
图标61以使操作者可以选择图标61的方式显示在示教器30(第二操作部)的显示器31上。当操作者选择示出非移动指令的总和的图标61时,操作者可以了解在共同目标位置P1处被执行的非移动指令的程序的细节。
如图10所示,在示教器30(第二操作部)的显示器31上显示的图标61表示“Move 1”的移动指令和“Move 3”的移动指令,“Move 1”的移动指令和“Move 3”的移动指令这两者具有共同目标位置P1的相同目标位置、以及表示在“Move 1”的移动指令之后的非移动指令的第一组图标71-75、以及表示在“Move 3”的移动指令之后的非移动指令的第二组图标76-80。
(变型)
上述实施例可以进行如下改变。在示教器30的显示器31上显示的图标可以在图标被显示的启动状态和图标消失的关闭状态之间切换。
目标位置可以由圆圈以外的其他图(第一代码)表示。该图(第一代码)可以包括字母、标记、图片和具有含义的其它图。
可以通过除数字之外的其他图(第二代码)来表示非移动指令的数量。该图(第二代码)可以是具有表示非移动指令的数量的符号(例如柱)的图标。具有更多柱的图标表示具有在目标位置处执行的多个非移动指令。图(第二代码)也可以是能够根据非移动指令的数量而改变颜色的图标。由于即使从透视图也可以检测到图标的颜色,因此,当颜色变化时,从移动轨迹的相同视点来看,具有颜色的图标可以改变。
尽管上述发明使用安装在示教器30中的微型计算机来支持机器人10的编程,但是安装在控制器20中的微型计算机也可以通过使用监视器(显示器)来支持编程。
本发明可以用于在现实图像上施加虚拟图像的眼镜型装置中。这种装置在操作者通过眼镜实际看到的机器人10的现实图像上施加移动轨迹L1-L3、目标位置P0-P4以及图标41-48、53-58、61-64(第二代码)的虚拟图像。
可以使用除了附图中公开的结构之外的其他类型的多关节机器人10。
- 用于对机器人操作进行编程的支持装置
- 对用于照明装置的操作设备进行编程的方法