一种五金拉手加工一体机及加工方法
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及五金拉手加工技术领域,尤其涉及一种五金拉手加工一体机及加工方法。
背景技术
五金拉手是家装饰五金的一部分,其主要用在浴室柜、橱柜、衣柜、抽屉等家具中,五金拉手具有装饰作用,但最主要的作用还是拉合作用。为了将五金拉手固定设置在家具上,通常需要在五金拉手上钻孔,然后加工内螺纹,通过螺丝将五金拉手与家具固定。
而现有的专利号为201721714723.3的一种用于五金拉手的自动钻孔攻丝机,包括工作台,工作台的上方设置有托盘,托盘的下端固接有由电机驱动的角位器,托盘的上端均匀固接有若干工件夹持装置,工件夹持装置径向设置,托盘的圆周外侧的工作台上依次设置有与工件夹持装置相对应的定位装置、钻孔装置和攻丝装置。本实用新型结构简单,操作方便,能够实现工件的自动钻孔攻丝,在节省了人力物力的同时,大大的提高了生产效率,具有广阔的市场推广价值;
该装置存在以下问题:
1、无法实现全自动的对五金拉手进行上料、钻孔、攻丝和下料处理;
2、加工的过程无法进行多个五金拉手进行同时加工,加工效率低下;
3、五金拉手的固定装置,不能进行有效的固定,不能保证钻孔、攻丝的准确性。
4、钻孔和攻丝不能通过单个驱动设备进行操作,加工成本较高。
发明内容
本发明实施例提供一种五金拉手加工一体机及加工方法,以解决现有的五金拉手钻孔攻丝效率低下的问题。
本发明实施例采用下述技术方案:一种五金拉手加工一体机,其特征在于,包括旋转工作台、上料机构、固定机构、加工机构、调节机构和下料机械手,所述固定机构设有若干组,若干组所述固定机构分别固定设置在旋转工作台的工作端上,所述上料机构、加工机构和下料机械手均围绕旋转工作台进行设置,所述调节机构设置在旋转工作台的下方,所述加工机构与固定机构上下对应,所述调节机构与加工机构连接。
具体的,所述旋转工作台包括加工台、旋转电机、第一斜齿轮、第二斜齿轮、第一转动轴和转动盘,所述旋转电机固定设置在加工台的下方,所述第一转动轴居中转动设置在加工台上,并且所述第一转动轴的两端均延伸出加工台外,所述第一斜齿轮固定设置在旋转电机的输出轴上,所述第二斜齿轮固定设置在第一转动轴的一端上,所述第一斜齿轮与第二斜齿轮相互啮合,所述转动盘固定设置在第一转动轴的另一端上。
具体的,所述上料机构包括上料传送带、第一支撑柱、移动组件、丝杆滑台和气缸夹爪,并且所述上料传送带的一端设置在加工台的上方,所述第一支撑柱设有两个,两个所述第一支撑柱间隔设置在加工台上的一侧,所述移动组件固定设置在两个所述第一支撑柱上,所述丝杆滑台竖直固定设置在移动组件的工作端上,所述气缸夹爪固定设置在丝杆滑台的工作端上。
具体的,所述移动组件包括安装槽、移动板、移动电机、第一齿轮、第一齿条和安装板,所述安装槽固定设置在两个所述第一支撑柱上,所述移动板滑动设置在安装槽内,所述移动电机固定设置在移动板上,所述第一齿轮固定设置在移动电机的输出端上,所述第一齿条固定设置在安装槽的一侧上,所述第一齿轮与第一齿条相互啮合,所述安装板呈凹字状结构,所述安装板固定设置在移动板上。
具体的,每组所述固定机构均包括固定气缸、安装箱体、连接板、推动板、移动板、固定板和放置板,所述固定气缸固定设置在转动盘的下方,并且所述固定气缸的输出端贯穿所述转动盘,所述安装箱体一侧中空,所述安装箱体固定设置在固定气缸上,并且所述固定气缸的输出端贯穿所述安装箱体内,所述推动板呈梯形,所述推动板固定设置在固定气缸的输出端上,所述移动板设有两个,两个所述移动板均呈梯形,两个所述移动板分别移动设置在安装箱体内侧,两个所述移动板的斜边分别与推动板的斜板滑动连接,所述连接板设有两个,两个所述连接板分别设置在移动板上,所述放置板固定设置在固定气缸上,所述固定板呈L形结构,所述固定板设有两个,两个所述固定板一端分别滑动设置在放置板上,两个所述固定板另一端与两个所述连接板连接。
具体的,所述加工机构包括升降旋转部件、钻孔部件和钻螺纹部件,所述升降旋转部件设置在加工台的上方,并且所述升降旋转部件与调节机构连接,所述钻孔部件和钻螺纹部件均设置在加工台上,所述钻孔部件和钻螺纹部件的结构原理一致,所述钻孔部件和钻螺纹部件均与固定机构上下对应,所述钻孔部件和钻螺纹部件均与升降旋转部件相对应。
具体的,所述升降旋转部件包括承载架、放置底板、放置顶板、第一驱动电机、第二驱动电机、第一皮带轴、第二皮带轴、第一连接皮带、第二连接皮带、螺纹杆、旋转杆、导向杆、升降架、连接轴、第三皮带轴、第四皮带轴、第三连接皮带、第一连接架和螺纹连接杆,所述承载架位于加工台的上方,所述承载架的底端与调节机构连接,所述放置底板设置在承载架的上方,所述放置顶板间隔设置在放置底板的正上方,所述螺纹杆和旋转杆设置在放置底板的一侧上,所述螺纹杆和旋转杆的顶端均贯穿放置顶板并且延伸出,所述导向杆设有两个,两个所述导向杆对称设置在放置底板的另一侧上,并且两个所述导向杆的顶端均与放置顶板连接,所述第一驱动电机和第二驱动电机并列设置在放置顶板的下方所述第一皮带轴和第二皮带轴均设置在放置顶板的上方,所述第一皮带轴与第一驱动电机的输出端连接,所述第二皮带轴与第二驱动电机的输出端连接,所述第一连接皮带的两端分别套设在第一皮带轴和螺纹杆的顶端上,所述第二连接皮带的两端分别套设在第二皮带轴和旋转杆的顶端上,所述升降架套设在螺纹杆和旋转杆上,所述连接轴设置在升降架上,并且所述连接轴与螺纹杆螺纹连接,所述第三皮带轴套设在旋转杆上,所述第三皮带轴与旋转杆连接,所述第三皮带轴位于升降架的上方,所述升降架的两端与两个导向杆活动连接,所述第四皮带轴设置在升降架的一侧上,所述第三连接皮带的两端分别套设在第三皮带轴和第四皮带轴上,所述第四皮带轴的顶端贯穿升降架与第一连接架连接,所述第一连接架位于升降架一侧的下方,所述螺纹连接杆设置在第一连接架的下方,所述螺纹连接杆与钻孔部件以及钻螺纹部件相对应。
具体的,所述钻孔部件包括放置架、双杆双向气缸、固定杆、螺纹连接管、放置箱、第一驱动气缸、移动板、导轨和钻孔机,所述放置架设置在加工台的上方,并且所述放置架位于加工台的一侧,所述双杆双向气缸设置在放置架上方的一侧上,所述固定杆设有两个,两个所述固定杆分别设置在双杆双向气缸的工作端上,所述螺纹连接管设置在螺纹连接杆的下方,并且所述螺纹连接管与螺纹连接杆螺接,所述放置箱设置在螺纹连接管的下方,并且所述放置箱设置在放置架内,所述第一驱动气缸、移动板和导轨均设置在放置箱内,所述第一驱动气缸位于放置箱内的一侧,所述放置箱的顶端上开设有一字型孔,所述导轨设有两个,两个所述导轨对称设置在一字型孔的两侧,所述移动板设置在两个导轨的上方,所述移动板的一侧与第一驱动气缸的输出端连接,所述钻孔机设置在移动板的下方,所述钻孔机穿过一字型孔并且延伸出,所述钻孔机的工作端与五金拉手上下对应。
具体的,所述调节机构包括放置外壳、第三驱动电机、第一连接轴、第一锥齿轮组、第二连接轴、第一齿轮、第二齿轮、第三连接轴、连接杆和移动连接架,所述放置外壳设置在加工台的下方,所述放置外壳设置在旋转电机的外侧,所述第三驱动电机设置在加工台的下方,所述第三驱动电机的输出端与第一连接轴的一端连接,所述第一连接轴的另一端与第一锥齿轮组的一端连接,所述第一锥齿轮组设置在放置外壳的一侧上,所述第一锥齿轮组的另一端与第二连接轴的一端连接,所述第二连接轴的另一端与第一齿轮连接,所述第三连接轴设置在放置外壳的另一侧上,所述第二齿轮设置在第三连接轴上,所述第一齿轮和第二齿轮啮合,所述移动连接架设置在弧形槽内,所述移动连接架的顶端与承载架的底端连接,所述连接杆的一端与第二齿轮连接,所述连接杆的另一端与移动连接架的底端连接。
一种五金拉手加工一体机的加工方法,包括以下步骤:
第一步:当需要对下料机械手进行加工时,首先通过上料传送带将五金拉手依次向加工台传送,通过移动组件的移动电机转动带动与其连接的第一齿轮转动,第一齿轮转动并通过与其啮合的第一齿条带动移动板在安装槽内滑动,移动板带动与其连接的安装板移动,安装板带动与其连接的丝杆滑台和气缸夹爪进行移动,气缸夹爪对五金拉手进行夹取,丝杆滑台带动气缸夹爪进行上升,移动组件带动丝杆滑台、气缸夹爪和五金拉手移动到固定机构处,将五金拉手放置到固定机构的工作端处,代替人工进行自动上料;
第二步:通过固定机构的固定气缸缩回时带动与其连接的推动板进行移动,推动板移动带动与其滑动连接的两个所述移动板在与安装箱体滑动配合的情况下向安装箱体中间位置移动,两个所述移动板移动带动与其连接的连接板进行移动,两个连接板移动带动与其连接的两个固定板在放置板上滑动,两个固定板来对五金拉手进行固定;
第三步:固定结束五金拉手时,通过旋转机构的旋转电机转动带动与其连接的第一斜齿轮转动,第一斜齿轮转动带动与其啮合的第二斜齿轮转动,第二斜齿轮转动带动与其连接的第一转动轴转动,第一转动轴转动带动与其连接的转动盘转动,转动盘转动带动与其连接的固定机构和五金拉手转动,依次转动到每个加工机构的下方,进行同时多个工位加工;
第四步:当五金拉手通过固定机构移动至钻孔部件的下方时,通过第一驱动电机的驱动可以使第一皮带轴带动第一连接皮带进行转动,第一连接皮带在转动时可以带动螺纹杆进行转动,螺纹杆在转动时通过连接轴带动升降架进行上下移动;
第五步:升降架在向下移动时,通过第二驱动电机的驱动可以使第二皮带轴带动第二连接皮带进行转动,第二连接皮带在转动时可以带动旋转杆进行转动,旋转杆在进行转动时可以带动第三皮带轴进行旋转,第三皮带轴在旋转时可以通过第三连接皮带带动第四皮带轴进行转动,通过第四皮带轴的转动可以使第一连接架进行同步转动,通过第一连接架的旋转可以带动螺纹连接杆进行同步转动,此时螺纹连接杆会呈旋转状态向下移动;
第六步:当螺纹连接杆呈旋转状态向下移动时,会与螺纹连接管进行螺接,螺接完成后,螺纹连接杆会带动放置箱进行同步移动,再通过第一驱动气缸的驱动使钻孔机与五金拉手的一侧上下对应,从而可以让钻孔机对五金拉手的一侧进行打孔,钻孔机在对五金拉手的一侧钻孔完成后,通过第一驱动气缸的驱动使移动板进行移动,使钻孔机与五金拉手的另一侧对应,在对五金拉手的另一侧进行钻孔;
第七步:当五金拉手钻孔完成后,通过第三驱动电机的驱动可以是第一连接轴进行旋转,第一连接轴在旋转时通过第一锥齿轮组带动第二连接轴进行旋转,通过第二连接轴可以带动第一齿轮进行转动,通过第一齿轮的转动可以使第二齿轮带动连接杆的一端进行旋转,连接杆的一端在进行旋转时,连接杆的另一端会带动移动连接架沿弧形槽进行移动,可以使移动连接架带动承载架进行同步移动,从而可以使升降旋转部件在钻孔部件和钻螺纹部件之间进行往返移动,通过升降旋转部件配合钻孔部件和钻螺纹部件可以对五金拉手进行打孔以及打螺纹作业;
第八步:通过下料机械手对加工完成的五金拉手进行自动下料。
本发明实施例采用的上述至少一个技术方案能够达到以下有益效果:
其一:本发明通过设有旋转工作台、上料机构、固定机构、钻孔机构、攻丝机构和下料机械手,所述上料组件用于将需要加工的五金拉手进行自动上料到固定组件处,所述旋转工作台用于带动需要加工的五金拉手进行旋转,便于加工,所述固定机构用于对加工的五金拉手进行固定,防止加工过程中晃动,影响加工效果,所述钻孔机构用于对五金拉手进行自动钻孔,所述攻丝机构用于对五金拉手进行自动攻丝,所述下料机械手用于自动对加工结束的五金拉手进行自动下料,通过本发明各个机构之间的配合能够全自动的对五金拉手进行上料、固定、旋转、钻孔、攻丝和下料,代替人工,效率更高,效果更好。
其二:通过上料传送带将五金拉手依次向加工台传送,通过移动组件的移动电机动作带动与其连接的第一齿轮转动,第一齿轮转动并通过与其啮合的第一齿条带动移动板在安装槽内滑动,移动板带动与其连接的安装板移动,安装板带动与其连接的丝杆滑台和气缸夹爪进行移动,气缸夹爪对五金拉手进行夹取,丝杆滑台带动气缸进行上升,移动组件带动丝杆滑台、气缸夹爪和五金拉手移动到固定机构处,将五金拉手放置到固定机构的工作端处,代替人工进行自动上料。
其三:通过固定机构的固定气缸缩回时带动与其连接的推动板进行移动,推动板移动带动与其滑动连接的两个所述移动板在与安装箱体滑动配合的情况下向安装箱体中间位置移动,两个所述移动板移动带动与其连接的连接板进行移动,两个连接板移动带动与其连接的两个固定板在放置板上滑动,两个固定板来对五金五金拉手进行固定,也起到限位作用,使得钻孔和攻丝位置更准确,加工过程中也不会晃动。
其四:旋转机构的旋转电机转动带动与其连接的第一斜齿轮转动,第一斜齿轮转动带动与其啮合的第二斜齿轮转动,第二斜齿轮转动带动与其连接的第一转动轴转动,第一转动轴转动带动与其连接的转动盘转动,转动盘转动带动与其连接的固定机构和五金拉手转动到钻孔机构的下方,带动五金拉手进行旋转到每一个加工机构下方进行同时加工,提高效率。
其五:调节机构中通过第三驱动电机的驱动可以是第一连接轴进行旋转,第一连接轴在旋转时通过第一锥齿轮组带动第二连接轴进行旋转,通过第二连接轴可以带动第一齿轮进行转动,通过第一齿轮的转动可以使第二齿轮带动连接杆的一端进行旋转,连接杆的一端在进行旋转时,连接杆的另一端会带动移动连接架沿弧形槽进行移动,可以使移动连接架带动承载架进行同步移动,从而可以使升降旋转部件在钻孔部件和钻螺纹部件之间进行往返移动;通过调节机构可以使升降旋转部件带动钻孔部件和钻螺纹部件进行作业,从而降低了加工成本。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
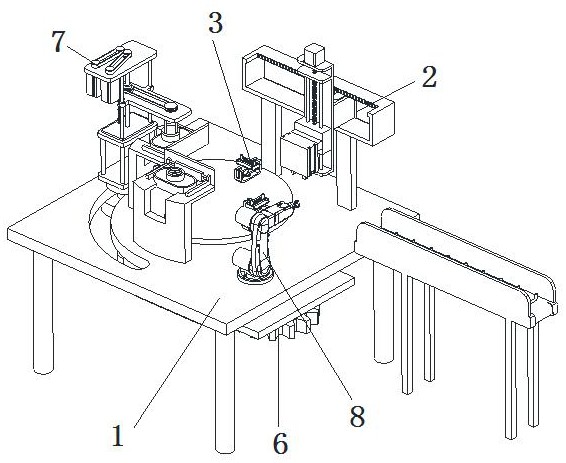
图1为本发明的立体结构示意图;
图2为本发明旋转工作台的立体结构示意图;
图3为本发明上料机构的立体结构示意图;
图4为本发明移动组件的立体结构示意图;
图5为本发明固定机构的立体结构示意图一;
图6为本发明固定机构的立体结构示意图二;
图7为本发明的局部结构示意图;
图8为本发明升降旋转机构的立体结构示意图一;
图9为本发明升降旋转机构的立体结构示意图二;
图10为本发明调节机构的立体结构示意图一;
图11为本发明调节机构的立体结构示意图二;
图12为本发明钻孔机构的立体结构示意图一;
图13为本发明钻孔机构的立体结构示意图二。
附图标记:1、旋转工作台;2、上料机构;3、固定机构;8、下料机械手;9、五金拉手;11、加工台;12、旋转电机;13、第一斜齿轮;14、第二斜齿轮;15、第一转动轴;16、转动盘;21、上料传送带;22、第一支撑柱;23、移动组件;24、丝杆滑台;25、气缸夹爪;231、安装槽;232、移动板;233、移动电机;234、第一齿轮;235、第一齿条;236、安装板;31、固定气缸;32、安装箱体;33、连接板;34、推动板;35、移动板;36、固定板;37、放置板;7、加工机构;71、升降旋转部件;711、承载架;712、放置底板;713、放置顶板;714、第一驱动电机;715、第二驱动电机;716、第一皮带轴;717、第二皮带轴;718、第一连接皮带;719、第二连接皮带;7110、螺纹杆;7111、旋转杆;7112、导向杆;7113、升降架;7114、连接轴;7115、第三皮带轴;7116、第四皮带轴;7117、第三连接皮带;7118、第一连接架;7119、螺纹连接杆;72、钻孔部件;721、放置架;722、双杆双向气缸;723、固定杆;724、螺纹连接管;725、放置箱;726、第一驱动气缸;727、移动板;728、导轨;729、钻孔机;73、钻螺纹部件;6、调节机构;61、放置外壳;62、第三驱动电机;63、第一连接轴;64、第一锥齿轮组;65、第二连接轴;66、第一齿轮;67、第二齿轮;68、第三连接轴;69、连接杆;610、移动连接架。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
结合附图1-13所示,本实施例提供一种五金拉手加工一体机,包括旋转工作台1、上料机构2、固定机构3、加工机构7、调节机构6和下料机械手8,所述固定机构3设有若干组,若干组所述固定机构3分别固定设置在旋转工作台1的工作端上,所述上料机构2、加工机构7和下料机械手8均围绕旋转工作台1进行设置,所述调节机构6设置在旋转工作台1的下方,所述加工机构7与固定机构3上下对应,所述调节机构6与加工机构7连接;所述上料机构2用于将需要加工的五金拉手9进行自动上料到固定机构3处,所述旋转工作台1用于带动需要加工的五金拉手9进行旋转,便于加工,所述固定机构3用于对加工的五金拉手9进行固定,防止加工过程中晃动,影响加工效果,所述加工机构7用于对五金拉手9进行自动钻孔以及攻丝,所述下料机械手8用于自动对加工结束的五金拉手9进行自动下料,通过本发明各个机构之间的配合能够全自动的对五金拉手9进行上料、固定、旋转、钻孔、攻丝和下料,代替人工,效率更高,效果更好。
具体的,结合附图2,所述旋转工作台1包括加工台11、旋转电机12、第一斜齿轮13、第二斜齿轮14、第一转动轴15和转动盘16,所述旋转电机12固定设置在加工台11的下方,所述第一转动轴15居中转动设置在加工台11上,并且所述第一转动轴15的两端均延伸出加工台11外,所述第一斜齿轮13固定设置在旋转电机12的输出轴上,所述第二斜齿轮14固定设置在第一转动轴15的一端上,所述第一斜齿轮13与第二斜齿轮14相互啮合,所述转动盘16固定设置在第一转动轴15的另一端上,通过旋转电机12转动带动与其连接的第一斜齿轮13转动,第一斜齿轮13转动带动与其啮合的第二斜齿轮14转动,第二斜齿轮14转动带动与其连接的第一转动轴15转动,第一转动轴15转动带动与其连接的转动盘16转动,当下料机械手8在加工的过程中,加工完成一步后进行旋转到下一个加工机构处,可以对下料机械手8进行依次转动到每个加工机构的下方,进行同时多个工位加工。
具体的,结合附图3,所述上料机构2包括上料传送带21、第一支撑柱22、移动组件23、丝杆滑台24和气缸夹爪25,并且所述上料传送带21的一端设置在加工台11的上方,所述第一支撑柱22设有两个,两个所述第一支撑柱22间隔设置在加工台11上的一侧,所述移动组件23固定设置在两个所述第一支撑柱22上,所述丝杆滑台24竖直固定设置在移动组件23的工作端上,所述气缸夹爪25固定设置在丝杆滑台24的工作端上,所述上料传送带21用于自动将下料机械手8传送到加工台11处,所述移动组件23用于带动丝杆滑台24和气缸夹爪25到达工作时的位置,所述丝杆滑台24用于带动气缸夹爪25进行升降,所述气缸夹爪25用于对下料机械手8进行夹取。
具体的,结合附图4,所述移动组件23包括安装槽231、移动板232、移动电机233、第一齿轮234、第一齿条235和安装板236,所述安装槽231固定设置在两个所述第一支撑柱22上,所述移动板232滑动设置在安装槽231内,所述移动电机233固定设置在移动板232上,所述第一齿轮234固定设置在移动电机233的输出端上,所述第一齿条235固定设置在安装槽231的一侧上,所述第一齿轮234与第一齿条235相互啮合,所述安装板236呈凹字状结构,所述安装板236固定设置在移动板232上,通过移动电机233动作带动与其连接的第一齿轮234转动,第一齿轮234转动并通过与其啮合的第一齿条235带动移动板232在安装槽231内滑动,移动板232带动与其连接的安装板236移动,安装板236带动与其连接的丝杆滑台24和气缸夹爪25进行移动,可以将上料传送带21上的下料机械手8夹取放置到固定机构3的工作端上。
具体的,结合附图5-附图6,具体的,每组所述固定机构3均包括固定气缸31、安装箱体32、连接板33、推动板34、移动板35、固定板36和放置板37,所述固定气缸31固定设置在转动盘16的下方,并且所述固定气缸31的输出端贯穿所述转动盘16,所述安装箱体32一侧中空,所述安装箱体32固定设置在固定气缸31上,并且所述固定气缸31的输出端贯穿所述安装箱体32内,所述推动板34呈梯形,所述推动板34固定设置在固定气缸31的输出端上,所述移动板35设有两个,两个所述移动板35均呈梯形,两个所述移动板35分别移动设置在安装箱体32内侧,两个所述移动板35的斜边分别与推动板34的斜板滑动连接,所述连接板33设有两个,两个所述连接板33分别设置在移动板35上,所述放置板37固定设置在固定气缸31上,所述固定板36呈L形结构,所述固定板36设有两个,两个所述固定板36一端分别滑动设置在放置板37上,两个所述固定板36另一端与两个所述连接板33连接,通过固定气缸31缩回时带动与其连接的推动板34进行移动,推动板34移动带动与其滑动连接的两个所述移动板35在与安装箱体32滑动配合的情况下向安装箱体32中间位置移动,两个所述移动板35移动带动与其连接的连接板33进行移动,两个连接板33移动带动与其连接的两个固定板36在放置板37上滑动,两个固定板36来对五金五金拉手9进行固定。
具体的,结合附图8-9所述,所述加工机构7包括升降旋转部件71、钻孔部件72和钻螺纹部件73,所述升降旋转部件71设置在加工台11的上方,并且所述升降旋转部件71与调节机构6连接,所述钻孔部件72和钻螺纹部件73均设置在加工台上,所述钻孔部件72和钻螺纹部件73的结构原理一致,所述钻孔部件72和钻螺纹部件73均与固定机构3上下对应,所述钻孔部件72和钻螺纹部件73均与升降旋转部件71相对应;所述钻孔部件72用于对五金拉手9进行打孔作业,所述钻螺纹部件73用于对五金拉手9进行打螺纹作业
具体的,结合附图8-11所述,所述升降旋转部件71包括承载架711、放置底板712、放置顶板713、第一驱动电机714、第二驱动电机715、第一皮带轴716、第二皮带轴717、第一连接皮带718、第二连接皮带719、螺纹杆7110、旋转杆7111、导向杆7112、升降架7113、连接轴7114、第三皮带轴7115、第四皮带轴7116、第三连接皮带7117、第一连接架7118和螺纹连接杆7119,所述承载架711位于加工台11的上方,所述承载架711的底端与调节机构6连接,所述放置底板712设置在承载架711的上方,所述放置顶板713间隔设置在放置底板712的正上方,所述螺纹杆7110和旋转杆7111设置在放置底板712的一侧上,所述螺纹杆7110和旋转杆7111的顶端均贯穿放置顶板713并且延伸出,所述导向杆7112设有两个,两个所述导向杆7112对称设置在放置底板712的另一侧上,并且两个所述导向杆7112的顶端均与放置顶板713连接,所述第一驱动电机714和第二驱动电机715并列设置在放置顶板713的下方,所述第一皮带轴716和第二皮带轴717均设置在放置顶板713的上方,所述第一皮带轴716与第一驱动电机714的输出端连接,所述第二皮带轴717与第二驱动电机715的输出端连接,所述第一连接皮带718的两端分别套设在第一皮带轴716和螺纹杆7110的顶端上,所述第二连接皮带719的两端分别套设在第二皮带轴717和旋转杆7111的顶端上,所述升降架7113套设在螺纹杆7110和旋转杆7111上,所述连接轴7114设置在升降架7113上,并且所述连接轴7114与螺纹杆7110螺纹连接,所述第三皮带轴7115套设在旋转杆7111上,所述第三皮带轴7115与旋转杆7111连接,所述第三皮带轴7115位于升降架7113的上方,所述升降架7113的两端与两个导向杆7112活动连接,所述第四皮带轴7116设置在升降架7113的一侧上,所述第三连接皮带7117的两端分别套设在第三皮带轴7115和第四皮带轴7116上,所述第四皮带轴7116的顶端贯穿升降架7113与第一连接架7118连接,所述第一连接架7118位于升降架7113一侧的下方,所述螺纹连接杆7119设置在第一连接架7118的下方,所述螺纹连接杆7119与钻孔部件72以及钻螺纹部件73相对应;在进行作业时,通过第一驱动电机714的驱动可以使第一皮带轴716带动第一连接皮带718进行转动,第一连接皮带718在转动时可以带动螺纹杆7110进行转动,螺纹杆7110在转动时通过连接轴7114带动升降架7113进行上下移动,通过第二驱动电机715的驱动可以使第二皮带轴717带动第二连接皮带719进行转动,第二连接皮带719在转动时可以带动旋转杆7111进行转动,旋转杆7111在进行转动时可以带动第三皮带轴7115进行旋转,第三皮带轴7115在旋转时可以通过第三连接皮带7117带动第四皮带轴7116进行转动,通过第四皮带轴7116的转动可以使第一连接架7118进行同步转动,通过第一连接架7118的旋转可以带动螺纹连接杆7119进行同步转动,从而可以使螺纹连接杆7119带动钻孔攻丝部件进行转动;升降架7113在进行上下移动时可以带动钻孔攻丝部件进行上下移动,从而可以是钻孔攻丝部件与五金拉手9对应,第一连接架7118在旋转时可以电动钻孔攻丝部件进行调节角度,使钻孔攻丝部件的工作端与五金拉手9对应上。
具体的,结合附图10-11所述,所述钻孔部件72包括放置架721、双杆双向气缸722、固定杆723、螺纹连接管724、放置箱725、第一驱动气缸726、移动板727、导轨728和钻孔机729,所述放置架721设置在加工台11的上方,并且所述放置架721位于加工台11的一侧,所述双杆双向气缸722设置在放置架721上方的一侧上,所述固定杆723设有两个,两个所述固定杆723分别设置在双杆双向气缸722的工作端上,所述螺纹连接管724设置在螺纹连接杆7119的下方,并且所述螺纹连接管724与螺纹连接杆7119螺接,所述放置箱725设置在螺纹连接管724的下方,并且所述放置箱725设置在放置架721内,所述第一驱动气缸726、移动板727和导轨728均设置在放置箱725内,所述第一驱动气缸726位于放置箱725内的一侧,所述放置箱725的顶端上开设有一字型孔,所述导轨728设有两个,两个所述导轨728对称设置在一字型孔的两侧,所述移动板727设置在两个导轨728的上方,所述移动板727的一侧与第一驱动气缸726的输出端连接,所述钻孔机729设置在移动板727的下方,所述钻孔机729穿过一字型孔并且延伸出,所述钻孔机729的工作端与五金拉手9上下对应;在进行作业时,首先,通过第一驱动气缸726的驱动可以使移动板727在两个导轨728上进行水平移动;钻孔机729在工作时,首先通过第一驱动气缸726的驱动使钻孔机729与五金拉手9的一侧上下对应,通过升级旋转机构部件的驱动可以使钻孔机729向下移动,从而可以让钻孔机729对五金拉手9的一侧进行打孔,钻孔机729在对五金拉手9的一侧钻孔完成后,通过第一驱动气缸726的驱动使移动板727进行移动,使钻孔机729与五金拉手9的另一侧对应,在对五金拉手9的另一侧进行钻孔。
具体的,结合附图12-13所述,所述调节机构6包括放置外壳61、第三驱动电机62、第一连接轴63、第一锥齿轮组64、第二连接轴65、第一齿轮66、第二齿轮67、第三连接轴68、连接杆69和移动连接架610,所述放置外壳61设置在加工台11的下方,所述放置外壳61设置在旋转电机12的外侧,所述第三驱动电机62设置在加工台的下方,所述第三驱动电机62的输出端与第一连接轴63的一端连接,所述第一连接轴63的另一端与第一锥齿轮组64的一端连接,所述第一锥齿轮组64设置在放置外壳61的一侧上,所述第一锥齿轮组64的另一端与第二连接轴65的一端连接,所述第二连接轴65的另一端与第一齿轮66连接,所述第三连接轴68设置在放置外壳61的另一侧上,所述第二齿轮67设置在第三连接轴68上,所述第一齿轮66和第二齿轮67啮合,所述移动连接架610设置在弧形槽内,所述移动连接架610的顶端与承载架711的底端连接,所述连接杆69的一端与第二齿轮67连接,所述连接杆69的另一端与移动连接架610的底端连接;在进行作业时,通过第三驱动电机62的驱动可以是第一连接轴63进行旋转,第一连接轴63在旋转时通过第一锥齿轮组64带动第二连接轴65进行旋转,通过第二连接轴65可以带动第一齿轮66进行转动,通过第一齿轮66的转动可以使第二齿轮67带动连接杆69的一端进行旋转,连接杆69的一端在进行旋转时,连接杆69的另一端会带动移动连接架610沿弧形槽进行移动,可以使移动连接架610带动承载架711进行同步移动,从而可以使升降旋转部件71在钻孔部件72和钻螺纹部件73之间进行往返移动。
具体的,结合附图1-附图13,一种五金拉手加工一体机的加工方法,包括以下步骤:
第一步:当需要对下料机械手9进行加工时,首先通过上料传送带21将五金拉手9依次向加工台11传送,通过移动组件23的移动电机233转动带动与其连接的第一齿轮234转动,第一齿轮234转动并通过与其啮合的第一齿条235带动移动板232在安装槽231内滑动,移动板232带动与其连接的安装板236移动,安装板236带动与其连接的丝杆滑台24和气缸夹爪25进行移动,气缸夹爪25对五金拉手9进行夹取,丝杆滑台24带动气缸夹爪25进行上升,移动组件23带动丝杆滑台24、气缸夹爪25和五金拉手9移动到固定机构3处,将五金拉手9放置到固定机构3的工作端处,代替人工进行自动上料;
第二步:通过固定机构3的固定气缸31缩回时带动与其连接的推动板34进行移动,推动板34移动带动与其滑动连接的两个所述移动板35在与安装箱体32滑动配合的情况下向安装箱体32中间位置移动,两个所述移动板35移动带动与其连接的连接板33进行移动,两个连接板33移动带动与其连接的两个固定板36在放置板37上滑动,两个固定板36来对五金拉手9进行固定;
第三步:固定结束五金拉手9时,通过旋转机构的旋转电机12转动带动与其连接的第一斜齿轮13转动,第一斜齿轮13转动带动与其啮合的第二斜齿轮14转动,第二斜齿轮14转动带动与其连接的第一转动轴15转动,第一转动轴15转动带动与其连接的转动盘16转动,转动盘16转动带动与其连接的固定机构3和五金拉手9转动,依次转动到每个加工机构的下方,进行同时多个工位加工;
第四步:当五金拉手9通过固定机构3移动至钻孔部件72的下方时,通过第一驱动电机714的驱动可以使第一皮带轴716带动第一连接皮带718进行转动,第一连接皮带718在转动时可以带动螺纹杆7110进行转动,螺纹杆7110在转动时通过连接轴7114带动升降架7113进行上下移动;
第五步:升降架7113在向下移动时,通过第二驱动电机715的驱动可以使第二皮带轴717带动第二连接皮带719进行转动,第二连接皮带719在转动时可以带动旋转杆7111进行转动,旋转杆7111在进行转动时可以带动第三皮带轴7115进行旋转,第三皮带轴7115在旋转时可以通过第三连接皮带7117带动第四皮带轴7116进行转动,通过第四皮带轴7116的转动可以使第一连接架7118进行同步转动,通过第一连接架7118的旋转可以带动螺纹连接杆7119进行同步转动,此时螺纹连接杆7119会呈旋转状态向下移动;
第六步:当螺纹连接杆7119呈旋转状态向下移动时,会与螺纹连接管724进行螺接,螺接完成后,螺纹连接杆7119会带动放置箱725进行同步移动,再通过第一驱动气缸726的驱动使钻孔机729与五金拉手9的一侧上下对应,从而可以让钻孔机729对五金拉手9的一侧进行打孔,钻孔机729在对五金拉手9的一侧钻孔完成后,通过第一驱动气缸726的驱动使移动板727进行移动,使钻孔机729与五金拉手9的另一侧对应,在对五金拉手9的另一侧进行钻孔;
第七步:当五金拉手9钻孔完成后,通过第三驱动电机62的驱动可以是第一连接轴63进行旋转,第一连接轴63在旋转时通过第一锥齿轮组64带动第二连接轴65进行旋转,通过第二连接轴65可以带动第一齿轮66进行转动,通过第一齿轮66的转动可以使第二齿轮67带动连接杆69的一端进行旋转,连接杆69的一端在进行旋转时,连接杆69的另一端会带动移动连接架610沿弧形槽进行移动,可以使移动连接架610带动承载架711进行同步移动,从而可以使升降旋转部件71在钻孔部件72和钻螺纹部件73之间进行往返移动,通过升降旋转部件71配合钻孔部件72和钻螺纹部件73可以对五金拉手9进行打孔以及打螺纹作业;
第八步:通过下料机械手8对加工完成的五金拉手9进行自动下料。
以上所述仅为本发明的实施例而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
- 一种五金拉手加工一体机及加工方法
- 一种制造五金拉手用的自动开料钻孔攻牙一体机