辅助越障机构及清洁机器人
文献发布时间:2023-06-19 11:30:53
技术领域
本发明属于智能家居技术领域,尤其涉及一种辅助越障机构及清洁机器人。
背景技术
现代生活中,自主清洁装置的出现为地面的清洁提供了便利,也降低了劳动强度。家用清洁机器人为常见的自主清洁设备,能在家庭房间内自动行进,并同时吸入周边的灰尘或杂质,从而完成地面清洁。
在家庭中,很多场合存在一些阶梯门槛,如阳台客厅、客厅卫生间、推拉门等,这些阶梯门槛会成为清洁机器人移动的障碍。为了使清洁机器人能够通过这些障碍物,通常采用在清洁机器人上设置有越障装置来实现脱困。而在实际使用中,清洁机器人在越障的过程中,容易出现尾部与地面直接接触而导致摩擦力大,从而造成清洁机器人难以实现有效越障。
发明内容
有鉴于此,本发明提供一种辅助越障机构及清洁机器人,以解决清洁机器人难以实现有效越障的问题。
为解决上述问题,本发明的技术方案是这样实现的:一种辅助越障机构,设置在清洁机器人的壳体的底部,所述辅助越障机构包括:驱动组件,设置在所述壳体上;推顶组件,包括与清洁面接触的抵压部,所述推顶组件与所述驱动组件连接,用于在所述驱动组件的驱动下至少使所述抵压部在第一位置和第二位置之间运动;其中,所述第一位置为所述抵压部距离所述清洁面最远的位置,所述第二位置为所述抵压部抵压所述清洁面的位置。
优选地,所述驱动组件与所述壳体的连接处到所述底部的后端的距离小于预设阈值。
优选地,所述驱动组件包括:驱动件,设置在所述壳体上;第一传动件,连接在所述驱动件与所述推顶组件之间,用于将所述驱动件产生的驱动力传递给所述推顶组件。
优选地,所述推顶组件包括:凸轮,具有所述抵压部;传动轴,穿过所述凸轮并与所述凸轮固定连接,所述传动轴的两端与所述壳体活动连接;第二传动件,固定连接在所述传动轴上,所述第二传动件与所述第一传动件连接。
优选地,所述第一传动件为驱动齿轮,所述第二传动件为从动齿轮,所述驱动齿轮与所述从动齿轮相啮合。
优选地,所述推顶组件还包括:滚动结构,活动连接在所述凸轮上,所述滚轮结构的至少部分可位于所述凸轮的下方。
优选地,所述凸轮的下端开设有凹槽,所述滚动结构部分设置在所述凹槽内并与所述凸轮活动连接。
优选地,所述滚动结构包括:转轴,设置在所述凹槽内并与所述凸轮连接;滚轮,与所述转轴可转动的连接,所述滚轮至少部分可位于所述凸轮的下方。
优选地,所述凸轮用于与所述清洁面接触的一侧表面设置为弧面。
优选地,所述辅助越障机构还包括:检测部件,用于检测所述清洁机器人的当前状态,以确定所述驱动组件的启动。
本发明还提供了一种清洁机器人,包括:壳体,所述壳体底部的尾部设置有容纳槽;上述的辅助越障机构;其中,所述辅助越障机构安装于所述容纳槽内。
本发明所提供的一种辅助越障机构及清洁机器人,该辅助越障机构通过设置有驱动组件和推顶组件,推顶组件在驱动组件的驱动下而能够在与清洁面最远的第一位置和抵压在清洁面上的第二位置之间运动。这样,在进行越障脱困时,通过驱动组件驱使推顶组件运动,便能够在推顶组件至少运动到第二位置时将壳体的尾部抬升,从而能够避免壳体的尾部与清洁面直接接触而造成摩擦力增加的情况发生。在该推顶组件将壳体的尾部抬升的作用下,便能够提高清洁机器人在越障时的通过能力,克服了清洁机器人难以实现有效越障的问题。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的辅助越障机构安装于壳体内的结构示意图;
图2是本发明实施例提供的辅助越障机构的结构示意图;
图3是本发明实施例提供的辅助越障机构在另一方位下的结构示意图;
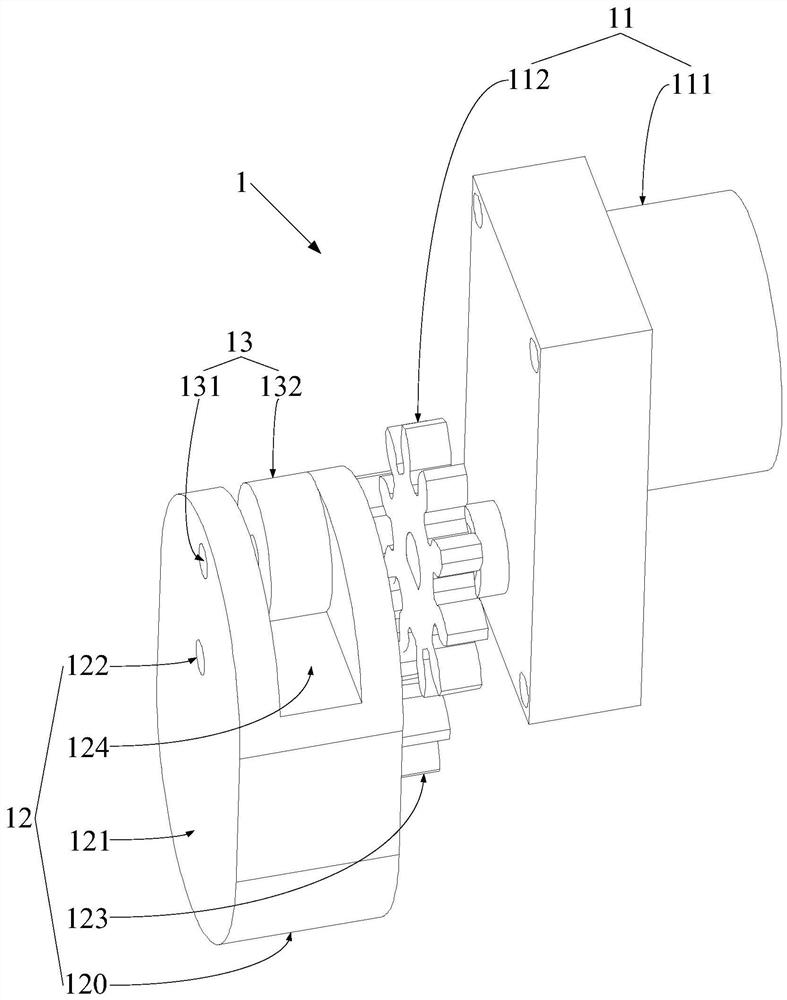
图4是本发明实施例提供的辅助越障机构的分解示意图;
图5是本发明实施例提供的辅助越障机构处于第一位置时的状态示意图;
图6是本发明实施例提供的辅助越障机构处于第二位置时的状态示意图。
附图标记说明:
1、辅助越障机构;L、预设阀值;11、驱动组件;111、驱动件;112、第一传动件;12、推顶组件;120、抵压部;121、凸轮;122、传动轴;123、第二传动件;124、凹槽;13、滚动结构;131、转轴;132、滚轮;2、清洁机器人;21、壳体;22、容纳槽。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在具体实施方式中所描述的各个具体技术特征和各实施例,在不矛盾的情况下,可以通过任何合适的方式进行组合,例如通过不同的具体技术特征的组合可以形成不同的实施例和技术方案。为了避免不必要的重复,本发明中各个具体技术特征的各种可能的组合方式不再另行说明。
如图2和图3所示,本发明实施例提供的辅助越障机构1,主要用于如玩具车或清洁机器人2(参照图1)等能在地面上移动的设备上的使用,以能够在此类设备需要进行越障时(如需要通过高度较低的阶梯门槛等障碍物),可以起到在越障时的辅助支撑作用,以提高设备越障的通过能力。在本发明实施例中,将该辅助越障机构1用于清洁机器人2上进行举例说明,但并不是对该辅助越障机构1的使用范围进行限定。
具体地,清洁机器人2在移动清洁的过程中,为了确保清洁机器人2能够顺利通过如阶梯门槛等一些高度相对较低的障碍物时,通常采用在清洁机器人 2上设置有能够帮助清洁机器人2翻越障碍物的越障结构,以便清洁机器人2 在碰触到障碍物时,能够借助该越障结构而实现翻越障碍物,提升清洁机器人 2自动清洁过程中的通行能力。在具体的越障过程中,由于障碍物在清洁机器人2移动的前方阻挡其移动,而在越障时,一般需要先将清洁机器人2移动的前方一侧抬升进行越障。参照图5和图6,这样,会使整个清洁机器人2发生倾斜,便存在清洁机器人2的壳体21的尾部与清洁面发生接触摩擦的情况,进而会造成清洁机器人2的越障难度增加。尾部是指清洁机器人2在工作状态下,沿移动清洁的方向,位于清洁方向的后方,即靠近于机壳后端边缘的位置;或者尾部也可以是指距离壳体的后端的距离在20%壳体长度范围内。因此,为了避免清洁机器人2在越障的过程中出现壳体21的尾部与清洁面发生摩擦,在本发明实施例中,采用在清洁机器人2的壳体21的底部设置有辅助越障机构 1,通过该辅助越障机构1来实现避免清洁机器人2的壳体21的尾部与清洁面发生摩接触摩擦,以提升清洁机器人2越障的可靠性。
如图2和图3所示,该辅助越障机构1包括驱动组件11和推顶组件12。驱动组件11设置在壳体21上,而推顶组件12包括与清洁面接触的抵压部120,并且推顶组件12与驱动组件11连接,用于在驱动组件11的驱动下,至少使抵压部120能够在第一位置和第二位置之间运动。具体地,为了实现推顶组件12 能够有效避免壳体21的尾部与清洁面发生接触,采用将驱动组件11与壳体21 的连接处到底部的后端的距离设置成小于预设阈值。由于在壳体21发生倾斜时,壳体21后端的边缘位置为最先与清洁面发生接触的部位,而倾斜状态下,受推顶组件12结构尺寸的限制,推顶组件12所能够将壳体21的尾部抬升的高度具有极限位置。因而,具体设置中,在能够通过最大高度的障碍物的前提下,推顶组件12设置在能够将壳体21抬升的高度刚好满足壳体21尾部不与清洁面接触的位置为临界位置,而该临界位置与壳体21后端的边缘之间的距离长度即为预设阀值L(参照图5)。当然,该预设阀值L也可直接根据实际试验来设置成具体合适的数值,如预设阀值L为推顶组件12设置在壳体21的位置与壳体 21后端的边缘之间的距离长度为4cm。如此,在满足驱动组件11和推顶组件 12安装空间的前提下,优选将驱动组件11设置在与壳体21的连接处的距离尽可能的小于该预设阀值L,以实现推顶组件12能够将壳体21的尾部提升最大的高度。而且,在本发明实施例中,第一位置为抵压部120距离清洁面最远的位置,第二位置为抵压部120抵压在清洁面上的位置;同时,该距离是指抵压部120与清洁面相接触的位置到清洁面上的距离。即,在实际使用中,当无需进行辅助越障时,该抵压部120保持在第一位置处,而在需要进行辅助越障时,便在驱动组件11的驱使下转动,直至抵压部120运动到第二位置而能够至少将壳体21的尾部抬升。
如图4所示,驱动组件11包括驱动件111和第一传动件112。驱动件111 设置在壳体21(参照图1)上,用于产生能够使推顶组件12运动的驱动力。而第一传动件112连接在驱动件111与推顶组件12之间,用于将驱动件111产生的驱动力传递给推顶组件12,驱使推顶组件12能够在第一位置和第二位置之间运动,满足辅助清洁机器人2(参照图5)实现越障的使用需求。
如图2和图3所示,在本发明实施例中,采用将该推顶组件12设置成包括凸轮121、传动轴122和第二传动件123。凸轮121为一个具有曲线轮廓的构件,在转动的过程中,各部分的运动范围不均等,并具有最大的运动范围的部分和最小运动范围的部分。因此,设置有凸轮121,并具有能够形成最大的运动范围的抵压部120。这样,辅助越障过程中,通过抵压部120转动与清洁面接触的循环接触,以能够实现间歇提升壳体21(参照图1)的尾部,满足辅助清洁机器人2(参照图5)实现可靠越障的使用需求。具体地,传动轴122 穿过凸轮121并凸轮121固定连接,而传动轴122的两端与壳体21活动连接,以实现推顶组件12的稳定安装;同时将第二传动件123固定连接在传动轴122 上,并使第二传动件123与第一传动件112连接,而第一传动件112与第二传动件123的连接可以是通过皮带方式实现间接连接,也可以是第一传动件112 和第二传动件123直接连接。这样,第一传动件112将驱动件111所产生的驱动力传递给第二传动件123后,便能够直接带动凸轮121转动,并在凸轮121 能够实现最大运动范围的部分抵压在清洁面上时,便实现了将壳体21的尾部抬升。
具体地,作为推顶组件12的另一种实现方式,也可以将推顶组件12设置成丝杆与滑块所组成的升降结构,然后通过第一传动件112带动丝杆正反转运动而实现将壳体21的尾部抬升。
如图2所示,在本发明实施例中,优选将第一传动件112设置为驱动齿轮,第二传动件123设置为从动齿轮,驱动齿轮与从动齿轮相啮合。这样,通过两个齿轮间的直接相互啮合传动,能够确保传动效果的稳定、可靠性,使凸轮121能够可靠实现转动。
如图2所示,推顶组件12还包括滚动结构13。该滚动结构13活动连接在凸轮121上,而且。滚轮结构的至少部分可位于凸轮121的下方。参照图3,由于在实际使用过程中,当推顶组件12处于第一位置时,存在其中的凸轮121 会从壳体21的底部露出。因而,为了避免凸轮121露出的部分与清洁面发生摩擦,便采用在凸轮121上设置有该滚动结构13,通过该滚动结构13来减少凸轮121露出的部分与清洁面之间的摩擦力,进而能够减少清洁机器人2在移动清洁的过程中所需要克服的摩擦力,提升清洁机器人2移动清洁的稳定性。
如图2所示,具体设置中,凸轮121的下端开设有凹槽124,滚动结构13 部分设置在凹槽124内并与凸轮121活动连接。这样,便实现了滚动结构13 与凸轮121之间的活动连接,而且,滚动结构13在与凸轮121活动连接之后,滚动结构13的一部分露出与凹槽124外,即滚动结构13高出于凸轮121设置有凹槽124的部分。从而,当凸轮121运动时,便是滚动结构13露出于凹槽 124外的部分与清洁面接触,而且滚动结构13能够转动,从而降低与清洁面之间的摩擦力。
如图2所示,在本发明实施例中,该滚动结构13包括转轴131和滚轮 132。转轴131设置在凹槽124内并与凸轮121连接;而滚轮132与转轴131 可转动的连接,并使滚轮132至少部分可位于凸轮121的下方。这样,通过转轴131实现将滚轮132活动连接在凹槽124内,并且滚轮132与转轴131之间为活动连接,从而,滚轮132能够相对转轴131转动,在与清洁面接触摩擦时,滚轮132能够转动而实现降低摩擦力的作用。在实际设置中,可以是将转轴131与凸轮121固定连接,也可是转轴131与凸轮121之间为转动连接,具体设置方式可按需选择。
如图6所示,凸轮121在转动的过程中,需要与清洁面接触而能够实现将壳体21的抬升,而且在抬升的同时凸轮121仍在转动,与清洁面存在相对运动而发生摩擦。因而,为了能够降低凸轮121与清洁面之间的摩擦力,便采用将凸轮121用于与清洁面接触的一侧表面设置为弧面,弧面的设置能够降低与清洁面的接触面积,从而能够提高凸轮121转动的顺畅性。
具体地,在具体使用当中,由于辅助越障机构1只在清洁机器人2需要进行越障时才会同步开启,以能够辅助清洁机器人2顺利通过障碍物。因而,为了实现对辅助越障机构1的进行精准控制,在本发明实施例中,将该辅助越障机构1设置成还包括检测部件,该检测部件用于检测清洁机器人2的当前状态,以确定驱动组件11是否需要启动。即,通过检测部件来对清洁机器人2 是否处于越障状态进行检测,并在检测到处于越障状态时,便控制驱动组件11 动作而能够实现凸轮121转动,进而能够实现将壳体21的尾部抬升,避免与清洁面发生接触,起到辅助越障的作用;而在检测到清洁机器人2处于正常的行走状态时,便控制驱动组件11处于不工作状态,此时的整个推顶组件12便处于第一位置处,不用于抬升壳体21的尾部。该检测部件的设置,实现了对辅助越障机构1的精准控制。
本发明实施例中所提供的辅助越障机构,通过设置驱动组件和推顶组件,从而能够实现在清洁机器人2需要进行越障时,驱动组件驱使推顶组件同步运动,通过推顶组件抵压在清洁面上而能够将壳体的尾部顶起,进而起到辅助清洁机器人通过障碍的目的,确保清洁机器人越障性能的可靠性。
如图5所示,本发明还提供了一种清洁机器人2,包括壳体21和上述的辅助越障机构1。具体地,在实际安装时,通过在壳体21底部的尾部设置有容纳槽22,然后将辅助越障机构1安装于容纳槽22内。具体地,由于清洁机器人2在进行越障时,壳体21会发生倾斜而容易导致壳体21的尾部与清洁面接触,进而造成加大越障的难度。因而,将辅助越障机构1设置在壳体21的尾部,便能够在越障的过程中,参照图6所示,通过该辅助越障机构1而将壳体21的尾部抬升,从而使壳体21的尾部不会与清洁面接触,进而能够避免由于壳体21的尾部与清洁面接触而导致摩擦力增大的情况发生。通过该辅助越障机构1,提高了清洁机器人2越障的可靠性。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 辅助越障机构及清洁机器人
- 一种双轮辅助提高越障碍高度的行走机构