一种自动化电缆剥皮装置及其装夹定位方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于电缆生产技术领域,具体涉及一种自动化电缆剥皮装置及其装夹定位方法。
背景技术
随着科技的发展与进步,人们对事物的要求也从能用就好的老旧思维,变得相当细腻和要求,唯有不断进步或创新的构想,产生新的形态以提高产品的附加价值,才能在市场竞争激烈的考验下生存。电缆是一种电能或信号传输装置,通常是由几根或几组导线组成,外面再包以金属或橡皮制的坚韧外层,电缆与电线一般都由芯线、绝缘包皮和保护外皮三个组成部分组成。电缆批量生产接线过程中需要将电缆去除绝缘层的电线端头进行应用和加工,也就是除去电缆端头一段绝缘层,露出导电芯的端部结构,
现有的电缆剥皮多是采用手动操作,效率低、防护差易出现工伤、操作难度大,而且现有的线缆剥皮装置体积大,对于不同直径的线缆不适用,并且不能保护工作环境。
发明内容
针对上述背景技术所提出的问题,本发明的目的是:旨在提供一种自动化电缆剥皮装置及其装夹定位方法。
为实现上述技术目的,本发明采用的技术方案如下:
一种自动化电缆剥皮装置,包括安装板,所述安装板底部设有支撑脚,所述安装板安装有第一支座,所述第一支座设有入料口,所述入料口设有定向结构,所述定向结构包括均匀设于入料口侧壁上的若干滑槽,所述滑槽侧壁上设有定向槽,所述定向槽与滑槽一并滑动匹配有顶块,所述顶块端部设有倾斜槽,所述顶块与滑槽之间连接有弹簧组,所述安装板设有第一T型滑槽,所述第一T型滑槽转动连接有丝杠,所述丝杠自中心位置向两侧螺纹相反,所述丝杠两侧均螺纹匹配有夹板,所述夹板与第一T型滑槽滑动匹配,所述丝杠一端连接有第一冠齿轮,所述安装板安装有第一电机,所述第一电机输出端连接有与第一冠齿轮啮合匹配的第一圆齿轮,所述安装板安装有第二支座,所述第二支座设有过孔,所述第二支座设有配合槽,所述配合槽侧面设有定位槽,所述配合槽匹配有第二冠齿轮,所述定位槽匹配有定位环,所述第二冠齿轮连接有L型支撑板,所述L型支撑板与定位环一体成型,所述第二支座安装有第二电机,所述第二电机输出端连接有与第二冠齿轮啮合匹配的第二圆齿轮,所述L型支撑板设有第二滑槽,所述第二滑槽滑动匹配有切刀,所述L型支撑板螺纹连接有调节丝杆,所述调节丝杆与切刀转动连接,所述安装板设有第二T型滑槽,所述第二T型滑槽滑动匹配有第三支座,所述第三支座安装有三爪卡盘,所述三爪卡盘位置对应过孔,所述第二T型滑槽底部设有接渣斗,所述安装板安装有气缸,所述气缸输出端与第三支座连接。
进一步限定,所述第二支座和第三支座均设有耳板,所述第二支座上的耳板连接有导向杆,所述导向杆与第三支座上的耳板滑动匹配,这样的设计,第三支座的移动更稳定。
进一步限定,所述倾斜槽设有防滑胶垫,这样的设计,固定效果好。
进一步限定,所述支撑脚为减震支撑脚,这样的设计,有效减震,进而降低使用时震动产生的噪声。
进一步限定,所述夹板设有防滑齿,这样的设计,防滑,夹紧效果好。
进一步限定,所述调节丝杆匹配有锁紧螺帽,这样的设计,加固对调节丝杆的固定。
进一步限定,所述切刀包括刀杆,所述刀杆内设有凹槽,所述凹槽滑动匹配有刀头,所述刀头与凹槽之间连接有第二弹簧,这样的设计,在切刀旋转的过程中,第二弹簧给予的压力,使刀头对电缆进行切割,进而达到切断剥皮目的。
一种自动化电缆剥皮装置装夹定位方法,包括如下步骤:
S1,清洁电缆外部,将电缆放入入料口中,持续向前,在定向结构的效果下,实现对电缆的自动扶正;
S2,启动第一电机,带动丝杠旋转,使夹板相对运动,对电缆进行预夹;
S3,控制气缸运行,带动第三支座向前移动,使三爪卡盘进入过孔中,启动三爪卡盘对电缆夹紧;
S4,旋拧调节丝杆,使切刀刀口位置对应电缆;
S5,启动第二电机,带动第二冠齿轮旋转,切刀随之旋转,对电缆进行切割;
S6;控制气缸运行,带动第三支座向后移动,三爪卡盘将电缆皮剥落,松开三爪卡盘,电缆皮掉入接渣斗。
进一步限定,所述步骤S3中,三爪卡盘对电缆夹紧后,控制气缸进行一个短距离回缩的动作,这样的设计,保证电缆绷直,易于切刀的切割。
进一步限定,上述步骤S4中,切刀的对刀方式可采用电动推杆配合进行升降,这样的设计,实现完全的自动化,同时精度更高。
采用本发明的有益效果:
1、本发明实现了自动化的剥皮,节约人力的同时,效率高,不易出现工伤问题,而且易于操作使用;
2、本发明剥皮后的电缆皮会直接掉入接渣斗中进行收集,进而保护了工作环境。
3、本发明适配于不同口径的电缆的剥皮,适配性强。
附图说明
本发明可以通过附图给出的非限定性实施例进一步说明;
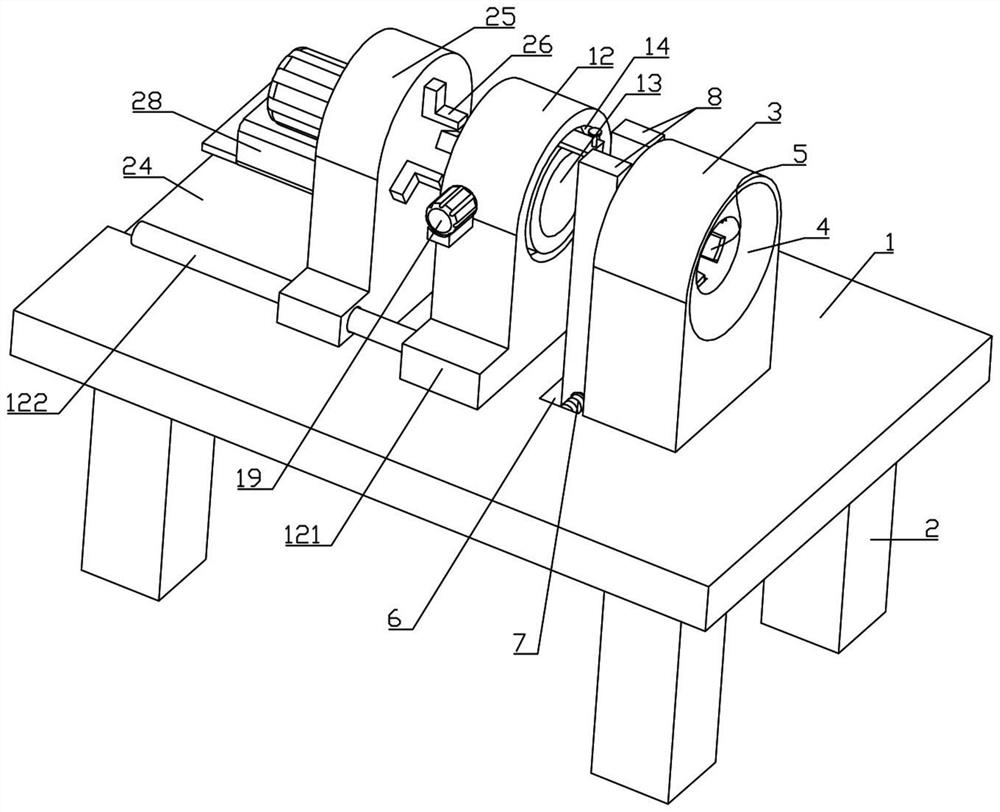
图1为本发明一种自动化电缆剥皮装置及其装夹定位方法实施例的结构示意图一;
图2为本发明一种自动化电缆剥皮装置及其装夹定位方法实施例的结构示意图二;
图3为本发明一种自动化电缆剥皮装置及其装夹定位方法实施例的剖面结构示意图一;
图4为本发明一种自动化电缆剥皮装置及其装夹定位方法实施例的剖面结构示意图二;
图5为图3中A处放大结构示意图;
图6为图5中B处放大结构示意图;
图7为本发明一种自动化电缆剥皮装置及其装夹定位方法实施例的第二冠齿轮位置部分结构示意图;
图8为本发明一种自动化电缆剥皮装置及其装夹定位方法实施例的流程框图;
主要元件符号说明如下:
安装板1、支撑脚2、第一支座3、入料口4、定向结构5、滑槽51、定向槽52、顶块53、倾斜槽54、弹簧组55、第一T型滑槽6、丝杠7、夹板8、第一冠齿轮9、第一电机10、第一圆齿轮11、第二支座12、耳板121、导向杆122、过孔13、配合槽14、定位槽15、第二冠齿轮16、定位环17、L型支撑板18、第二电机19、第二圆齿轮20、第二滑槽21、切刀22、刀杆221、凹槽222、刀头223、第二弹簧224、调节丝杆23、第二T型滑槽24、第三支座25、三爪卡盘26、接渣斗27、气缸28。
具体实施方式
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
如图1~图8所示,本发明的一种自动化电缆剥皮装置,包括安装板1,所述安装板1底部设有支撑脚2,所述安装板1安装有第一支座3,所述第一支座3设有入料口4,所述入料口4设有定向结构5,所述定向结构5包括均匀设于入料口4侧壁上的若干滑槽51,所述滑槽51侧壁上设有定向槽52,所述定向槽52与滑槽51一并滑动匹配有顶块53,所述顶块53端部设有倾斜槽54,所述顶块53与滑槽51之间连接有弹簧组55,所述安装板1设有第一T型滑槽6,所述第一T型滑槽6转动连接有丝杠7,所述丝杠7自中心位置向两侧螺纹相反,所述丝杠7两侧均螺纹匹配有夹板8,所述夹板8与第一T型滑槽6滑动匹配,所述丝杠7一端连接有第一冠齿轮9,所述安装板1安装有第一电机10,所述第一电机10输出端连接有与第一冠齿轮9啮合匹配的第一圆齿轮11,所述安装板1安装有第二支座12,所述第二支座12设有过孔13,所述第二支座12设有配合槽14,所述配合槽14侧面设有定位槽15,所述配合槽14匹配有第二冠齿轮16,所述定位槽15匹配有定位环17,所述第二冠齿轮16连接有L型支撑板18,所述L型支撑板18与定位环17一体成型,所述第二支座12安装有第二电机19,所述第二电机19输出端连接有与第二冠齿轮16啮合匹配的第二圆齿轮20,所述L型支撑板18设有第二滑槽21,所述第二滑槽21滑动匹配有切刀22,所述L型支撑板18螺纹连接有调节丝杆23,所述调节丝杆23与切刀22转动连接,所述安装板1设有第二T型滑槽24,所述第二T型滑槽24滑动匹配有第三支座25,所述第三支座25安装有三爪卡盘26,所述三爪卡盘26位置对应过孔13,所述第二T型滑槽24底部设有接渣斗27,所述安装板1安装有气缸28,所述气缸28输出端与第三支座25连接。
一种自动化电缆剥皮装置装夹定位方法,包括如下步骤:
S1,清洁电缆外部,将电缆放入入料口4中,持续向前,在定向结构5的效果下,实现对电缆的自动扶正;
S2,启动第一电机10,带动丝杠7旋转,使夹板8相对运动,对电缆进行预夹;
S3,控制气缸28运行,带动第三支座25向前移动,使三爪卡盘26进入过孔13中,启动三爪卡盘26对电缆夹紧;
S4,旋拧调节丝杆23,使切刀22刀口位置对应电缆;
S5,启动第二电机19,带动第二冠齿轮16旋转,切刀22随之旋转,对电缆进行切割;
S6;控制气缸28运行,带动第三支座25向后移动,三爪卡盘26将电缆皮剥落,松开三爪卡盘26,电缆皮掉入接渣斗27。
本实施案例中,在使用一种自动化电缆剥皮装置及其装夹定位方法的时候,先将电缆外部进行清洁,然后将电缆直接放入入料口4中,直到与顶块53接触,继续向前,在弹簧组55的效果下,顶块53回缩的同时也会在反作用力的效果下实现对电缆的自动扶正,而且这样的方式适配于不同直径的电缆的自动扶正,当电缆伸入到合适位置后,第一电机10运行带动丝杠7旋转,此处需说明的是,合适位置的确定,可采用接近开关,亦可采用目测,目测的方式对第一电机10的运行通过控制按钮实现,丝杆7的旋转在相反螺纹的效果下,夹板8相对运行对电缆进行预夹,然后控制气缸28运行,带动第三支座25在第二T型滑槽24中向着第二支座12移动,直到三爪卡盘26伸入过孔13中,并控制三爪卡盘26运行,对电缆进行夹紧,然后旋拧调节丝杆23,因调节丝杆23与L型支撑板18螺纹连接,而切刀22与L型支撑板18中的第二滑槽21滑动匹配,所以调节丝杆23的旋转就会使切刀22进行上下位移,使切刀22刀口位置接触电缆,然后就可以启动第二电机19运行,带动第二圆齿轮20和第二冠齿轮16旋转,切刀22在其内部第二弹簧224的加压效果下,旋转的过程中,对电缆进行切割,切割深度受调节切刀22位置的下压力度控制,进而达到了对电缆皮的切断,然后控制气缸28运行,带动第三支座25向后移动,三爪卡盘26将电缆皮从电缆皮切断位置剥落,松开三爪卡盘26,电缆皮在自重下掉入接渣斗27中实现收集,保护工作环境,夹板8松开,回拉电缆获得剥皮完成的电缆,方便快捷,而且不受电缆直径尺寸影响,适配性强,在下一根电缆剥皮时,直接伸入,当电缆与切刀22接触时,会顶动,切刀22刀头223向上移动,从而不影响进入过孔中,进一步的,可在三爪卡盘26夹住电缆时,控制气缸28进行一个短距离的回缩,使电缆绷直,也会使得刀头223向着凹槽222移动。
优选所述第二支座12和第三支座25均设有耳板121,所述第二支座12上的耳板121连接有导向杆122,所述导向杆122与第三支座25上的耳板121滑动匹配,这样的设计,第三支座25的移动更稳定,实际上,也可根据具体情况考虑使第三支座25的移动更稳定的方法。
优选所述倾斜槽54设有防滑胶垫,这样的设计,固定效果好,实际上,也可根据具体情况考虑防滑胶垫的选取。
优选所述支撑脚2为减震支撑脚,这样的设计,有效减震,进而降低使用时震动产生的噪声,实际上,也可根据具体情况考虑支撑脚2的结构设计。
优选所述夹板8设有防滑齿,这样的设计,防滑,夹紧效果好,实际上,也可根据具体情况考虑防滑的措施。
优选所述调节丝杆23匹配有锁紧螺帽,这样的设计,加固对调节丝杆23的固定,实际上,也可根据具体情况考虑对调节丝杆23加固的方式。
优选所述切刀22包括刀杆221,所述刀杆221内设有凹槽222,所述凹槽222滑动匹配有刀头223,所述刀头223与凹槽222之间连接有第二弹簧224,这样的设计,在切刀22旋转的过程中,第二弹簧224给予的压力,使刀头223对电缆进行切割,进而达到切断剥皮目的,实际上,也可根据具体情况考虑切刀22的结构设计。
优选所述步骤S3中,三爪卡盘26对电缆夹紧后,控制气缸28进行一个短距离回缩的动作,这样的设计,保证电缆绷直,易于切刀22的切割,实际上,也可根据具体情况考虑气缸28回缩的距离。
优选上述步骤S4中,切刀22的对刀方式可采用电动推杆配合进行升降,这样的设计,实现完全的自动化,同时精度更高,实际上,也可根据具体情况考虑切刀22的对刀方法。
上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种自动化电缆剥皮装置及其装夹定位方法
- 一种可快速装夹固定的电线电缆剥皮装置