一种遮挡检测中背景初始化预判断的方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及智能监控视频处理技术领域,涉及一种遮挡检测中背景初始化预判断的方法。
背景技术
随着科技的不断发展,特别是智能技术的发展,以及互联网的广泛应用,特别是近年来,网约车的时兴给大众出行提供了便利,为了保障车内人员的人身安全,在车内加装监控相机,不仅可以威慑不法分子,而且可以有效保存车内现场信息,为犯罪行径提供了有力佐证。但是,为了保证车内监控相机的正常工作,防止人员故意遮挡镜头,需要对监控画面进行自动遮挡检测,并对异常情况进行报警。目前车载监控相机车内视频画面遮挡检测的方法主要基于背景差分法,通过计算当前画面与背景图像的帧差并依据帧差判断是否遮挡。
现有技术中,常用的方法如下:
(1)背景差分法:将当前获取的图像帧与背景图像做差分运算,得到目标运动区域的灰度图,对灰度图进行阈值化提取差分区域。
(2)帧间差分法:将视频流中相邻两帧或相隔几帧图像的两幅图像像素值相减,并对相减后的图像进行阈值化来提取图像中的运动区域。
现有技术中的背景帧差法,完全依赖初始化背景,如果单纯的通过开机即初始化背景会出现实际场景中一些错误背景(相机偏移车内视角或被遮挡)初始化的问题,一旦背景初始化时的图像画面是被遮挡的,后续将无法根据背景帧差判断是否遮挡。
发明内容
为了解决上述问题,本发明的目的在于:
在背景初始化前进行预判断,主要通过获取ISP(图像信号处理器)图像散焦参数,对监控画面图像进行自适应阈值二值化,计算二值化图的分块细节特征分布,以及图像稳定与否来进行画面图像遮挡的三次预判断,从而保证背景图像的正确性(背景图像清晰且无遮挡)及稳定性(背景图像采集时监控镜头没有大幅度晃动、画面内无物体进行大幅度移动)。
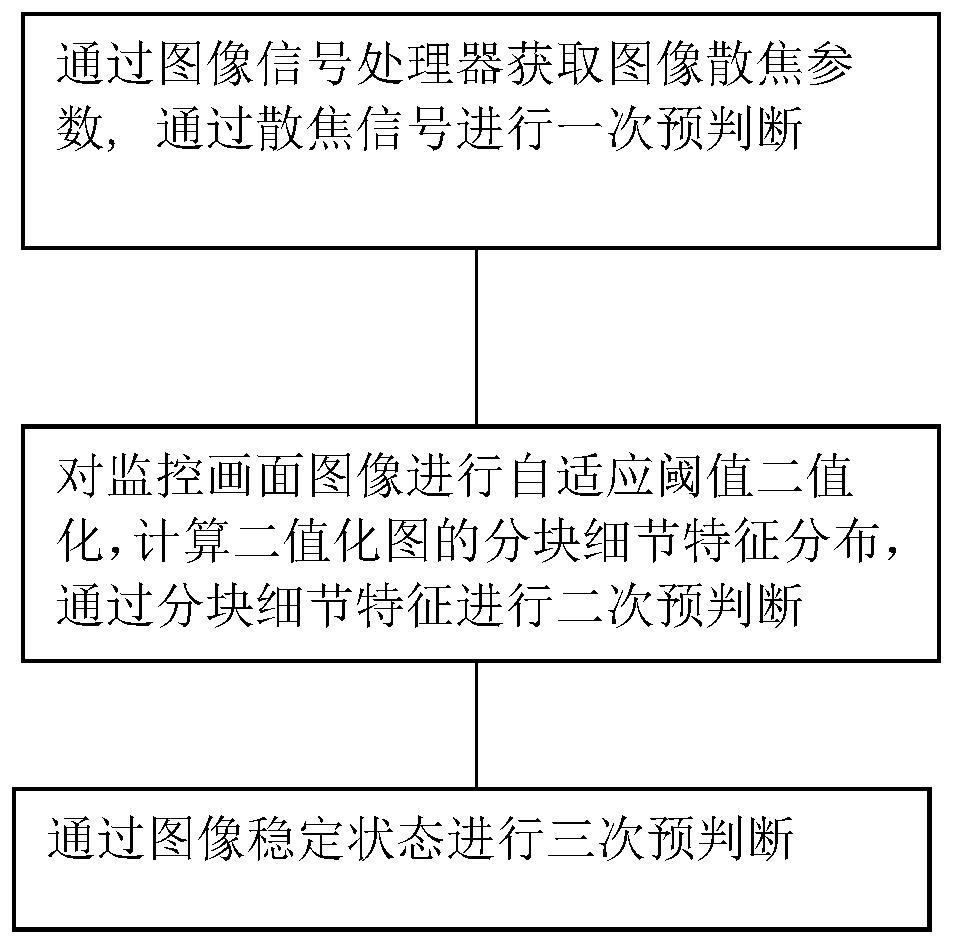
具体地,本发明提供一种遮挡检测中背景初始化预判断的方法,所述方法通过图像信号处理器获取图像散焦参数,通过散焦信号进行一次预判断,对监控画面图像进行自适应阈值二值化,计算二值化图的分块细节特征分布,通过分块细节特征进行二次预判断,以及通过图像稳定状态进行三次预判断来完成画面图像遮挡检测中背景初始化的三次预判断。
在所述通过图像信号处理器获取图像散焦参数的步骤前,还包括步骤:参数初始化以及判断是否重新开机并计算开机帧数。
其中,所述参数初始化,进一步包括:
遮挡预警信号:shade_flag=0,其中0表示判断当前画面无遮挡,1表示判断有遮挡;
图像散焦信号:defocus_flag=0,其中0表示图像清晰无散焦,1表示图像模糊有散焦;
当前帧序号:Index=0,其中每次重启相机时Index=0,获取第一帧图像后,会令Index=1,其后每获取一帧图像,Index会相应加1;
散焦参数:Afmetric=65535,其中Afmetric值域[0,65535];
计数器TC=0。
其中,所述判断是否重新开机并计算开机帧数,进一步包括:
如果Index=0,则保存当前帧图像为临时背景,并令Index=1;否则Index=Index+1。
在所述的判断图像稳定状态的步骤后,还包括步骤:背景初始化和返回各参数值,等待下一帧图像,执行判断是否重新开机并计算开机帧数的步骤。
其中,所述的背景初始化具体包括,将当前帧图像保存为背景;令遮挡预警信号shade_flag=0。
其中,所述的通过图像信号处理器获取图像散焦参数,通过散焦信号进行一次预判断,具体包括以下步骤:
1.计算散焦信号
获取图像信号处理器中表征图像散焦程度的散焦参数Afmetric,如果Afmetric<0.4x 65535,则散焦信号defocus_flag=1;否则散焦信号defocus_flag=0;
2.进行一次预判断
如果散焦信号defocus_flag=0,表示当前帧图像通过一次预判断,执行所述的对监控画面图像进行自适应阈值二值化,计算二值化图的分块细节特征分布,通过分块细节特征进行二次预判断的步骤;否则令计算器TC=0,遮挡预警信号shade_flag=1,执行返回各参数值,等待下一帧图像,执行判断是否重新开机并计算开机帧数的步骤。
所述的对监控画面图像进行自适应阈值二值化,计算二值化图的分块细节特征分布,通过分块细节特征进行二次预判断,具体包括以下步骤:
A.进行自适应阈值二值化
通过自适应阈值二值化图显示画面内物体的细节特征点,画面内无物体或被遮挡时,其对应的细节特征点少,部分区域将没有细节特征点;
B.求分块细节特征分布
将全图等分成16块,统计各个分块的细节特征,即对应二值化图中的非零像素值;
C.通过分块细节特征进行二次预判断
判断最小块的细节特征点统计值Minedge,如果Minedge>0,表示当前帧图像无遮挡,通过第二次预判断,执行所述的判断图像稳定状态的步骤;否则令计数器TC=0,遮挡预警信号shade_flag=1,执行返回各参数值,等待下一帧图像,执行判断是否重新开机并计算开机帧数的步骤。
所述的通过图像稳定状态进行三次预判断,具体包括以下步骤:
a.求相邻帧差
将当前帧图像与临时背景作帧差;统计帧间差分图中的非零像素点,表示为Tmpdiff;
b.保存当前帧图像为临时背景;
c.判断相邻图像差异大小
如果Tmpdiff d.判断图像是否稳定 如果Index>30且TC>20,表示通过三次预判断,执行背景初始化的步骤,其中Index>30表示开机前30帧不进行三次预判断,因为设备开机,图像从黑屏收敛到正常显示需要一段时间,这部分时间很短,本方法预留30帧(约1~3s)等待图像正常显示;TC>20表示至少需要连续21个相邻帧差Tmpdiff在规定的阈值T内,即至少需要连续22帧图像的差异小; 如果Index>30且TC>20条件不满足,表示未通过三次预判断,执行返回各参数值,等待下一帧图像,执行判断是否重新开机并计算开机帧数的步骤。 由此,本申请的优势在于: (1)通过三次背景初始化预判断,保证初始化的背景无遮挡且稳定,有效提高了后期遮挡检测的准确性; (2)通过引用ISP(图像信号处理器)中的散焦参数,判断图像的散焦程度,过滤散焦程度较大的图像,排除了近距离全遮挡等情况的干扰; (3)通过获取自适应阈值二值化图的分块细节特征分布,排除了部分遮挡等情况的干扰; (4)通过连续多帧图像的相邻帧差判断背景图像的稳定性,排除了采集背景图像时刻,监控相机大幅度晃动或画面内物体大幅度移动等情况的干扰;另外通过增加Index>30条件排除了设备开机时图像由黑屏收敛到正常显示过程的干扰。 附图说明 此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,并不构成对本发明的限定。 图1是本发明涉及的方法的示意框图。 图2是本发明涉及的实施例的流程示意图。 图3是本发明涉及方法的具体实施例的流程框图。 具体实施方式 为了能够更清楚地理解本发明的技术内容及优点,现结合附图对本发明进行进一步的详细说明。 如图1所示,本发明涉及了一种遮挡检测中背景初始化预判断的方法,所述方法通过图像信号处理器获取图像散焦参数,通过散焦信号进行一次预判断,对监控画面图像进行自适应阈值二值化,计算二值化图的分块细节特征分布,通过分块细节特征进行二次预判断,以及通过图像稳定状态进行三次预判断来完成画面图像遮挡检测中背景初始化的三次预判断。在所述通过图像信号处理器获取图像散焦参数的步骤前,还包括步骤:参数初始化以及判断是否重新开机并计算开机帧数。在所述的判断图像稳定状态的步骤后,还包括步骤:背景初始化和返回各参数值,等待下一帧图像,执行判断是否重新开机并计算开机帧数的步骤。 具体地,如图2所示,本发明的实施例的步骤可以表示为如下: 本方法的实施步骤: S1.参数初始化; S2.判断是否重新开机并计算开机帧数; S3.通过散焦信号进行一次预判断; S4.通过分块细节特征进行二次预判断; S5.通过图像稳定状态进行三次预判断; S6.背景初始化; S7.返回各参数值,等待下一帧图像,执行S2。 其中, S3.通过散焦信号进行一次预判断,包括: S3.1计算散焦信号 获取ISP(图像信号处理器)中表征图像散焦程度的参数Afmetric,如果Afmetric<0.4x 65535,则散焦信号defocus_flag=1;否则散焦信号defocus_flag=0; S3.2进行一次预判断 如果散焦信号defocus_flag=0,表示当前帧图像通过一次预判断,执行S4;否则令TC=0,遮挡预警信号shade_flag=1,执行S7; S4.通过分块细节特征进行二次预判断,包括: S4.1进行自适应阈值二值化; 通过自适应阈值二值化图显示画面内物体的细节特征点,画面内无物体或被遮挡时,其对应的细节特征点较少,部分区域可能没有细节特征点; S4.2求分块细节特征分布 将全图等分成16块,统计各个分块的细节特征,即对应二值化图中的非零像素值; S4.3通过分块细节特征进行二次预判断 判断最小块的细节特征点统计值Minedge,如果Minedge>0,表示当前帧图像无遮挡,通过第二次预判断,执行S5;否则令TC=0,遮挡预警信号shade_flag=1,执行S7; S5.通过图像稳定状态进行三次预判断,包括: S5.1求相邻帧差 将当前帧图像与临时背景作帧差;统计帧间差分图中的非零像素点,表示为Tmpdiff; S5.2保存当前帧图像为临时背景; S5.3判断相邻图像差异大小 如果Tmpdiff S5.4判断图像是否稳定 如果Index>30且TC>20,表示通过三次预判断,执行S6,其中Index>30表示开机前30帧不进行三次判断,因为设备开机,图像从黑屏收敛到正常显示需要一段时间,这部分时间很短,但是本方法预留30帧(约1~3s)等待图像正常显示;TC>20表示至少需要连续21个相邻帧差Tmpdiff在规定的阈值T1内,即至少需要连续22帧图像的差异较小; 如果Index>30且TC>20条件不满足,表示未通过三次预判断,执行S7。 本发明方法涉及的具体实施流程如图3所示,其中方法的主要实施步骤如下: 步骤1.参数初始化,具体参数意义及初始化值如下: 遮挡预警信号:shade_flag=0,其中0表示判断当前画面无遮挡,1表示判断有遮挡; 图像散焦信号:defocus_flag=0,其中0表示图像清晰无散焦,1表示图像模糊有散焦; 当前帧序号:Index=0,其中每次重启相机时Index=0,获取第一帧图像后,会令Index=1,其后每获取一帧图像,Index会相应加1; 散焦参数:Afmetric=65535,其中Afmetric值域[0,65535]; 计数器TC=0; 步骤2.判断是否重新开机并计算开机帧数 如果Index=0,则保存当前帧图像为临时背景,并令Index=1;否则Index=Index+1; 步骤3.通过散焦信号进行一次预判断 3.1计算散焦信号 获取ISP(图像信号处理器)中表征图像散焦程度的参数Afmetric,如果Afmetric<0.4x 65535,则散焦信号defocus_flag=1;否则散焦信号defocus_flag=0; 3.2通过散焦信号进行一次预判断 如果散焦信号defocus_flag=0,表示当前帧图像通过一次预判断,执行步骤4;否则令TC=0,遮挡预警信号shade_flag=1,执行步骤7; 步骤4.通过分块细节特征进行二次预判断 4.1进行自适应阈值二值化; 通过自适应阈值二值化图显示画面内物体的细节特征点,画面内无物体或被遮挡时,其对应的细节特征点较少,部分区域可能没有细节特征点; 4.2求分块细节特征分布 将全图等分成16块,统计各个分块的细节特征,即对应二值化图中的非零像素值; 4.3通过分块细节特征进行二次预判断 判断最小块的细节特征点统计值Minedge,如果Minedge>0,表示当前帧图像无遮挡,通过第二次预判断,执行步骤5;否则令TC=0,遮挡预警信号shade_flag=1,执行步骤7; 步骤5.通过图像稳定状态进行三次预判断 5.1求相邻帧差 将当前帧图像与临时背景作帧差(如果为重新开机第一帧图像,临时背景由步骤2赋值,如果不是第一帧,则由步骤5.2赋值,表示前一帧图像,实际表示的是第一帧为相同图像帧差,其他为相邻两帧的帧差,即帧间差分法);统计帧间差分图中的非零像素点,表示为tmpdiff; 5.2保存当前帧图像为临时背景; 5.3判断相邻图像差异大小 如果tmpdiff 5.4判断图像是否稳定 如果index>30且TC>20,表示通过三次预判断,执行步骤6,其中index>30表示开机前30帧不进行三次判断,因为设备开机,图像从黑屏收敛到正常显示需要一段时间,这部分时间很短,但是本方法预留30帧(约1~3s)等待图像正常显示;TC>20表示至少需要连续21个相邻帧差tmpdiff在规定的阈值T1内,即至少需要连续的22帧图像的差异较小; 如果index>30且TC>20条件不满足,表示未通过三次预判断,执行步骤7; 步骤6.背景初始化 将当前帧图像保存为背景;令遮挡预警信号shade_flag=0; 步骤7.返回各参数值,等待下一帧图像,执行步骤2。 以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种遮挡检测中背景初始化预判断的方法
- 一种遮挡检测中背景更新预判断期间避免误报的辅助检测方法