一种基于新型误差变换的AUV预设性能轨迹跟踪控制方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种基于新型误差变换的AUV预设性能轨迹跟踪控制方法。属于水下机器人轨迹跟踪控制领域。
背景技术
近年来,自主式水下航行器(Autonomous underwater vehicle,AUV)在海洋环境观测、军事情报搜集等研究领域已经得到了广泛的应用。随着海洋开发力度的增强,AUV的应用逐渐从观测向轻度作业拓展。例如水下基础设施的检查、深海油气勘探等等。水下机器人的控制系统就相当于是AUV的“大脑”,是AUV研究中的关键。为了能够实现水下机器人更高精度的轨迹跟踪控制,一种名为预设性能的控制方法逐渐被用于水下机器人控制系统的设计。
神经网络多用于处理AUV模型不确定性或未知的外部扰动问题,使用神经网络估计上述扰动,通过运用一些常用的控制方法,如PID控制、滑模控制、反步控制、自适应控制等,从而获得相对较好的控制方案。如文献[李金林.水下机器人—机械手结构设计及自适应神经网络控制研究[D].哈尔滨工程大学,2018.]对一种具有双关节的小型水下电动机械手进行了研制,并针对该机械手设计了一种自适应控制与神经网络控制相结合的方法。但此方案因为计算量过大而无法满足系统快速性的要求。
文献[Yana Yang,Chao Ge,Hong Wang,Xiaoyi Li,Changchun Hua.Adaptiveneural network based prescribed performance control for teleoperation systemunder input saturation[J].Journal of the Franklin Institute,2015,352(5).]在存在系统不确定性以及存在外部干扰的情况下,设计了基于相应的自适应控制与神经网络控制相结合的预设性能控制方案,并将该方案与PD(比例加微分)控制器进行了仿真比较,从而证明了该预设性能控制方法的有效性。文献[Zeyang Yin,Jianjun Luo,CaishengWei.Quasi fixed-time fault-tolerant control for nonlinear mechanical systemswith enhanced performance[J].Applied Mathematics and Computation,2019,352.]研究了一种十分新颖的采用准定时的预设性能控制方法,发现其具有固定的收敛时间可以预先进行指定的突出优点。文献[Charalampos P.Bechlioulis,George A.Rovithakis.Alow-complexity global approximation-free control scheme with prescribedperformance for unknown pure feedback systems[J].Automatica,2014,50(4).]针对未知的纯反馈系统,使用预设性能控制方法进行了控制器设计,提出了一种通用的无近似状态的反馈控制方案。该方案能够使输出的误差收敛到预设的任意小值,并且避免了传统反步法带来的复杂性问题。但上述方案没有考虑控制的超调问题,且设计的性能函数的参数和实际的误差收敛速率之间较难建立一个明确的数学关系。
传统的预设性能控制方法存在一定缺陷,其引入的性能函数通常采用普通的指数收敛形式,导致设计的性能函数的参数和实际的误差收敛速率之间较难建立一个明确的数学关系,误差收敛时间不宜确定,且超调较大。
发明内容
本发明是为了解决传统预设性能控制方法引入的性能函数参数和实际误差收敛速率没有明确的数学关系,而导致误差收敛时间不确定且超调较大的问题。现提供一种基于新型误差变换的AUV预设性能轨迹跟踪控制方法。
一种基于新型误差变换的AUV预设性能轨迹跟踪控制方法,其特征在于,包括:
步骤一、根据AUV的控制力和力矩τ,得到AUV推力器故障影响下的实际的控制力和力矩τ+△τ,其中,△τ表示推进器故障对控制力与力矩的影响;
步骤二、建立改进的性能函数ρ(t),通过改进的性能函数ρ(t)确定轨迹跟踪误差e(t)的上下界;
步骤三、根据确定的轨迹跟踪误差的上下界,得到转换后的误差ε(t);
步骤四、基于转换后的误差ε(t)设计虚拟控制器α;
步骤五、基于虚拟控制器α设计预设性能跟踪控制器。
有益效果
本发明算法对传统预设性能控制方法进行了改进,采用了改进的性能函数和新的误差变换方法,使AUV轨迹跟踪误差能够在规定的时间内收敛,并且超调较小,能够在规定的时间内获得所需的稳态精度。
本发明算法通过引入预设性能方法与误差变换,可以对收敛速度和收敛时间进行预先设定,更贴近实际的工程需求。
附图说明
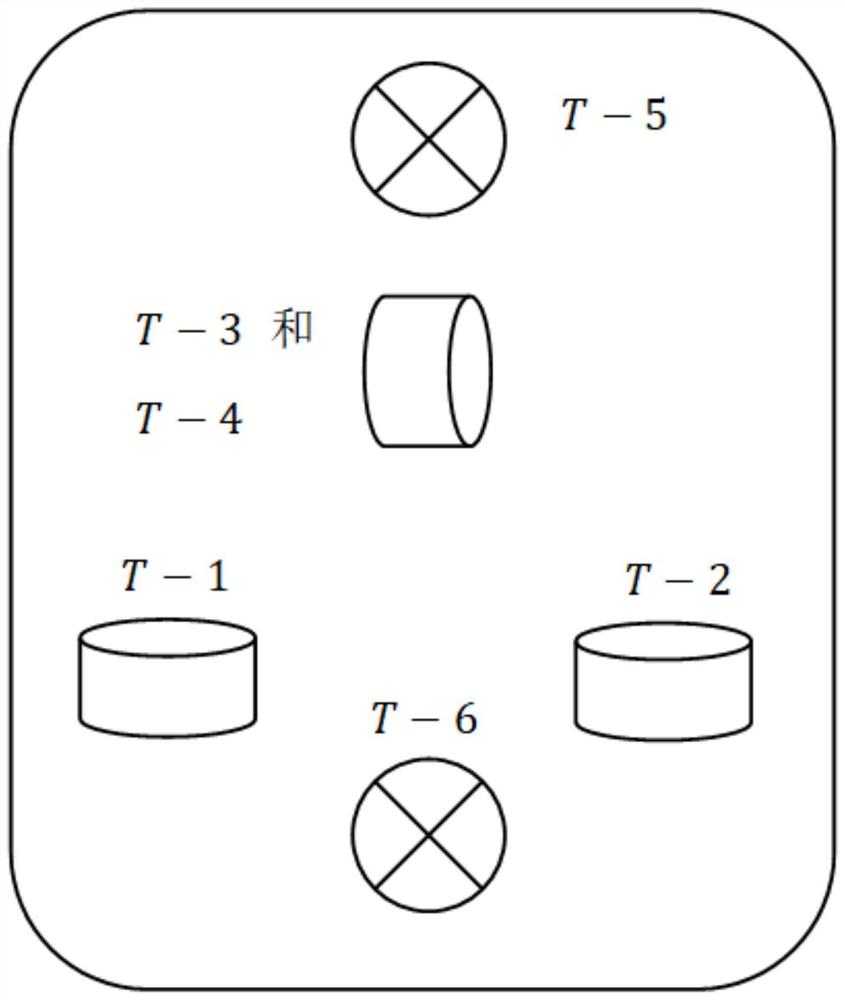
图1为水下机器人推进器布置图;
图2a为存在推进器故障时轨迹和跟踪误差曲线图;
图2b为存在推进器故障时轨迹和跟踪误差曲线图;
图2c为存在推进器故障时轨迹和跟踪误差曲线图;
图2d为存在推进器故障时轨迹和跟踪误差曲线图;
图2e为存在推进器故障时轨迹和跟踪误差曲线图;
图2f为存在推进器故障时轨迹和跟踪误差曲线图;
图3a为存在推进器故障时控制力和力矩曲线图;
图3b为存在推进器故障时控制力和力矩曲线图;
具体实施方式
具体实施方式一:本实施方式所述的一种基于新型误差变换的AUV预设性能轨迹跟踪控制方法,包括:
以海面上某一点E为原点,Eξ轴和Eη轴置于水平面内且互相垂直,Eξ轴正向指向正北方向;Eζ垂直于Eξη平面,正向指向地心,建立惯性坐标系(E-ξηζ);
以AUV的重心为原点、经过原点的水线面为x轴、经过原点的横剖面为y轴、经过原点的纵剖面为z轴,建立运动坐标系(G-xyz);
AUV一般模型方程为:
其中,M表示惯性矩阵;C(v)表示向心力矩阵;D(v)表示水阻尼矩阵;g(η)表示恢复力和力矩;η表示AUV在惯性坐标系下的六自由度位置与姿态;v表示运动坐标系下的速度与角速度;J(η)表示惯性坐标系和运动坐标系之间的坐标转换矩阵;τ表示控制力和力矩,可表示为:
τ=B(v)u (2)
其中,B(v)表示水下机器人推力分配矩阵,B(v)∈R
为了使基于改进性能函数的预设性能跟踪控制方法实现对AUV更高精度的轨迹跟踪控制,设计一个改进性能函数的预设性能控制输入矢量u,确保轨迹跟踪误差e在存在推进器故障的情况下,满足期望的瞬态和稳态响应,e=η-η
推进器是水下机器人的重要组成部分,也是水下机器人的主要故障源;在本发明中,只考虑推进器损失部分推进效率因子,推力器故障的影响可用推力分配矩阵变化量△B表示,故实际的控制力和力矩为τ+△τ,即:
τ+△τ=(B
其中,△τ表示控制力和力矩的变化量;B
为达到预期的控制目标,引入性能函数作为预设的性能边界;性能函数定义如下:
对于一个光滑函数,ρ(t):R
(1)ρ(t)是一个单调递减的正函数;
(2)
则此函数为性能函数,性能函数一般设计为指数形式:
ρ(t)=(ρ
其中,ρ
一般的性能函数收敛速度取决于指数项e
其中,ρ
通过改进的性能函数,可以预先设定收敛时间T
基于提出的改进的性能函数对AUV预设性能控制器进行推导,利用的约束不等式为:
P
其中,e(t)表示轨迹跟踪误差;
误差上界P
其中,δ
直接解决约束下的跟踪控制问题比较困难,因此需要采用一种误差变换的方式将有约束的问题转换为无约束的稳定控制问题,传统的误差变换函数S
若存在一个函数S
(1)S
(2)
(3)
则此函数被称为误差变换函数;
采用误差变换的方式将有约束的问题转换为无约束的稳定控制问题;采用改进的误差变换方法;本发明采用转换后的误差ε(t)表示为:
ε(t)=tan(πθ(t)) (7)
其中,
若转换后的误差ε(t)有界,则跟踪误差e(t)可以被约束在上界P
对此进一步证明:
公式ε(t)=tan(πθ)的逆变换为:
arctan(ε(t))=πθ(t) (8)
由式(8),进一步可以得到
因为ε(t)有界,所以存在一个常数ε
由
最终有
P
证毕。
接下来,使用转换后的误差ε(t)而不是跟踪误差e(t)来进行控制器的推导;当转换后的误差ε(t)有界时,跟踪误差e(t)会被限制在预设的性能边界(12)中。通过为P
在不考虑不确定性和干扰的情况下由AUV模型方程
转换后误差ε(t)对时间t求导得:
其中,
对上式进行整理,可得:
为了便于描述和表达,对所有的时间t进行了省略,e(t)、ε(t)、θ(t)和ρ(t)等简写为e、ε、θ、ρ;
采用反步法对虚拟控制器进行推导,李雅普诺夫函数表示为:
其中,z=v-α,α为虚拟控制器。
则李雅普诺夫函数V
虚拟控制器α可以选为:
李雅普诺夫函数V
AUV的预设性能控制器设计为:
其中,z=v-α,α为虚拟控制器,c
此时,李雅普诺夫函数V
实施例
为验证本发明所设计控制方法的有效性,本发明对某型AUV进行仿真验证。当水下机器人对称时,为了对问题进行简化,可以假设机器人的运动可以被解耦,从而减少模型中的参数数量。因此,只需要提供部分水动力导数信息来计算水下机器人的惯性矩阵M,科氏和向心矩阵C(v),和阻尼矩阵D(v)。水下机器人水动力系数和惯性系数分别见表1和表2。其中水动力系数包含了惯性力系数、粘性力系数和附加质量系数。
表1水下机器人的水动力系数
表2水下机器人的惯性系数
水下机器人的推进器结构采用全驱动模式,共有6个推进器,如图1所示
仿真条件设置:
对于每个运动自由度,水下机器人轨迹跟踪控制器的目标可以定为:
(1)稳态跟踪误差小于0.01米;
(2)最大误差收敛时间不超过10秒。
基于以上目标,可以确定改进性能函数控制器参数如表3所示。
表3改进性能函数控制器参数
水下机器人初始位置和姿态为
η
螺旋线轨迹是水下机器人常见且具有代表性的一种轨迹,它涵盖了多个运动自由度。因此,可选择一条螺旋线作为期望的轨迹。
η
根据给出的水下机器人初始位置和姿态,以及期望的水下机器人运动轨迹,可以确定预设性能控制器参数如表4所示。
表4预设性能控制器参数
针对推进器故障问题,认为故障只发生在推进器T-1上。每个方向上推进器的结构都是相同的。推进器T-1存在的一种故障可以表示为
采用改进性能函数的控制器时,水下机器人在推进器T-1故障情况下六自由度轨迹跟踪误差曲线如图2c-图2f所示。
由图2c-图2f可以看出,本发明所提出的改进性能函数的预设性能轨迹跟踪控制算法可以保证跟踪误差处于预先设定的范围内,并能在规定的时间内获得所需的稳态精度。
该算法的控制力和力矩曲线如图3a、图3b所示。
从图3a、图3b可以看出,当第5秒时推进器T-1出现故障,控制力和力矩开始出现波动。但在控制器作用下,该波动很快恢复平稳,轨迹跟踪误差仍能处于预先设定的范围内,证明算法在推进器故障情况下仍能实现轨迹跟踪控制。结合如图2c-图2f轨迹跟踪误差曲线可以证明,该算法在推进器故障情况下可以在规定的时间内获得所需的稳态精度。
- 一种基于新型误差变换的AUV预设性能轨迹跟踪控制方法
- 一种基于切换性能函数技术的AUV鲁棒轨迹跟踪控制方法