一种面向风电塔筒维护作业的爬壁机器人
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及爬壁机器人技术领域,特别是涉及一种面向风电塔筒维护作业的爬壁机器人。
背景技术
爬壁机器人是可以在垂直墙壁上攀爬并完成作业的自动化机器人,爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人,虽然目前存在一些爬壁机器人,但是针对一些特殊的工作要求,一些常规的爬壁机器人无法有效的完成工作,例如,对于风电塔筒外表进行打磨、拉毛和表面喷漆作业,而对于一些常规的爬壁机器人来说,无法正常且高效的完成风电塔筒外表面作业。
发明内容
针对现有技术的不足,本发明提供了面向风电塔筒维护作业的爬壁机器人,通过设置末端作业系统机器人无法,解决了以上背景技术中提到的现有的爬壁机器人无法对风电塔筒外表进行打磨、拉毛和表面喷漆的问题。
为实现以上目的,本发明通过以下技术方案予以实现:一种面向风电塔筒维护作业的爬壁机器人,其特征在于,包括:
移动本体,所述移动本体包括主体部分和履带模块,所述主体部分的左右两侧通过万向轮均连接有所述履带模块;
作业执行机构,所述作业执行结构为两个,分别与所述履带模块连接;
摄像头系统,所述摄像头系统与所述主体部分连接;
末端作业系统,所述末端作业系统与所述作业执行机构连接。
在本申请的一些实施例中,所述主体部分包括:
主体梁,所述主体梁的左右两侧与所述万向轮连接;
电器盒套环,所述电器盒套环设置在所述主体梁上;
电器盒,所述电器盒与所述电器盒套环连接。
在本申请的一些实施例中,所述履带模块包括:
履带部,所述履带结构与所述万向轮连接;
带轮部,所述带轮部设置在所述履带部内部;
张紧结构,所述张紧结构设置有四个,四个所述张紧结构均与在所述履带部连接。
在本申请的一些实施例中,其特征在于:
所述履带部包括履带、外履带板和内履带板,所述内履带板与所述万向轮连接;
所述带轮部包括大主动同步带轮、大从动同步带轮和四个小同步带轮,所述大主动同步带轮和所述大从动同步带轮分别设置的履带的两端,所述四个小同步带轮均匀设置在大主动同步带轮和所述大从动同步带轮之间,所述大主动同步带轮上连接有电机,所述履带与所述大主动同步带轮、所述大从动同步带轮和所述四个小同步带轮均齿合;
所述张紧结构包括张紧轴、张紧轴弹簧和张紧轴上盖,所述张紧轴设置在所述履带上,所述张紧轴弹簧连接在所述张紧轴上,所述张紧轴上盖盖合在张紧轴和所述张紧轴弹簧上,其中两个所述张紧轴上盖同时与所述履带和所述外履带板连接,另外两个所述张紧轴上盖同时与所述履带和所述内履带板连接。
在本申请的一些实施例中,所述的四个小同步带轮每两个之间设置有浮动机构,所述浮动机构包括磁铁和固定导磁板,所述磁铁设置在所述两个小同步带轮之间,所述固定导磁板设置在所述磁铁上;
所述浮动机构上设置有上盖,所述上盖上设置有转轴支撑座,所述转轴支撑座上连接有转轴,所述转轴同时与所述内履带板和所述外履带板连接。
在本申请的一些实施例中,所述作业执行机构包括固定侧板、长连接侧板、筋板、滚珠丝杠、连接板;
所述固定侧板为两个,所述两个固定侧板的一端分别连接在所述内履带板和所述外履带板上,所述两个固定侧板的另一端分别与两个所述长连接侧板的一端连接,所述两个长连接侧板的另一端连接有连接板,所述连接板上设置有滚珠丝杠,所述滚珠丝杠的一端连接有电机;
所述两个长连接侧板之间还设置有所述筋板。
在本申请的一些实施例中,所述摄像头系统包括支架、安装架、底座和摄像头,所述支架与所述电器盒套环连接,所述安装架安装在所述支架上,所述底座安装在所述安装架上,所述摄像头与所述底座连接。
在本申请的一些实施例中,所述末端作业系统为气动角磨除锈模块,所述气动角磨除锈模块包括固定滑台板、第一连接板、第二连接板、气缸、气缸固定板、角磨机固定板和气动角磨机,所述固定滑台板与所述滚珠丝杠连接,所述固定滑台板与所述第一连接板和所述第二连接板的一端连接,所述第一连接板与所述第二连接板上下固定连接,所述第一连接板另一端与所述气缸固定板的侧面连接,所述第二连接板的另一端与所述气缸固定板一面的边缘连接,所述气缸固定板的一面周向设置有三个所述气缸,所述气缸固定板与所述角磨机固定板的一端连接,所述气动角磨机与所述角磨机固定板的另一端连接。
在本申请的一些实施例中,所述末端作业系统为气动磨盘拉毛模块,所述气动磨盘拉毛模块包括固定滑台板、第三连接板、第四连接板、气缸、气缸固定板、拉毛盘固定板和气动拉毛盘,所述固定滑台板与所述滚珠丝杠连接,所述固定滑台板与所述第三连接板和所述第四连接板的一端连接,所述第三连接板与所述第四连接板上下固定连接,所述第三连接板另一端与所述气缸固定板的侧面连接,所述第四连接板的另一端与所述气缸固定板一面的边缘连接,所述气缸固定板的一面周向设置有三个所述气缸,所述气缸固定板与所述拉毛盘固定板的一端连接,所述气动拉毛盘与所述拉毛盘固定板的另一端连接。
在本申请的一些实施例中,所述末端作业系统为气动喷涂防腐模块,所述气动喷涂防腐模块包括固定滑台板、推杆铰链座、喷漆前伸连接件、喷漆杆、喷枪,所述推杆铰链座连接在固定滑台板上,所述喷漆前伸连接件与所述推杆铰链座连接,所述喷漆杆与所述喷漆前伸连接件连接,所述喷枪与所述喷漆杆连接。
本发明公开一种面向风电塔筒维护作业的爬壁机器人,爬壁机器人由移动本体、作业执行机构、摄像头系统、末端作业系统;作业执行机构分别安装在移动本体的两侧履带模块上,并分别固接末端作业系统;作业执行机构采用上下错位布置,保证两侧末端作业工艺系统的作业区域能够有一定的重复率,避免造成中间区域的遗漏;爬壁机器人移动本体采用履带移动,轻质永磁吸附方式,柔性结构设计满足对塔桶壁面变曲率环境的稳定吸附与灵活运动要求,同时具备越障能力和柔性接触壁面;作业执行机构采用直线滑轨结构,凭借丝杠正反转,实现末端作业工艺模块的往复运动,以增加作业面积与作业而效率;末端作业系统根据作业需求,分为气动角磨除锈模块、气动磨盘拉毛模块、气动喷涂防腐模块三种;三种末端作业工艺模块均可采用快速插接的方式在动作执行机构上进行快速更换,实现对风电塔筒外表进行打磨、拉毛和表面喷漆。
附图说明
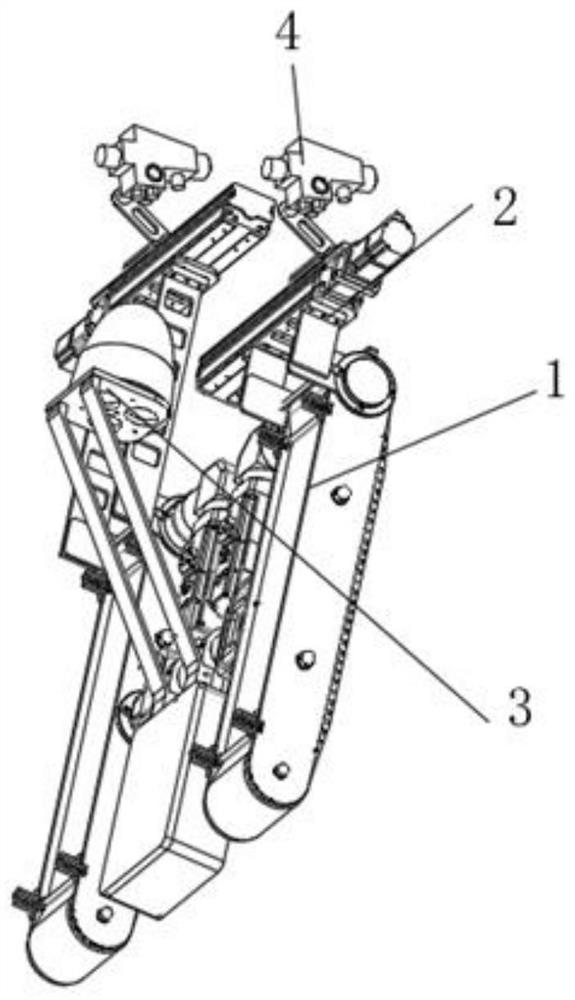
图1是本发明的爬壁机器人的示意图之一;
图2是本发明的爬壁机器人的示意图之一;
图3是本发明的移动本体的示意图之一;
图4是本发明的移动本体的示意图之一;
图5是本发明的履带模块的示意图;
图6是本发明的作业执行机构的示意图;
图7是本发明的摄像头系统的示意图;
图8是本发明的气动角磨除锈模块的示意图;
图9是本发明的气动磨盘拉毛模块的示意图;
图10是本发明的气动喷涂防腐模块的示意图;
附图标记:
1、移动本体;101、主体梁;102、电器盒;103、电器盒套环;104、万向轮;105、履带;106、大主动同步带轮;107、小同步带轮;108、磁铁;109、固定导磁板;110、上盖;111、转轴;112、转轴支撑座;114、张紧轴;115、张紧轴弹簧;116、张紧轴上盖;117、大从动同步带轮;118、外履带板;119、内履带板;2、作业执行机构;201、固定侧板;202、长连接侧板;203、筋板;204、滚珠丝杠;206、连接板;207、短连接侧板;100、滑台固定板;3、摄像头系统;301、支架;302、安装架;303、底座;304、摄像头;4气动角磨除锈模块;402、第一连接板;403、第二连接板;200、气缸;300、气缸固定板;406、角磨机固定板;407、气动角磨机;5、气动磨盘拉毛模块;502、第三连接板;503、第四连接板;506、拉毛盘固定板;507、气动拉毛盘;6、气动喷涂防腐模块;602、推杆铰链座;603、喷漆前伸连接件;604、喷漆杆;605、喷枪。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本申请的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。
如图1-5所示,根据本申请的一些实施例中的一种面向风电塔筒维护作业的爬壁机器人。所述移动本体1由主体部分和履带模块构成,包括主体梁101、电器盒102、电器盒套环103、万向轮104、履带105、大主动同步带轮106、小同步带轮107、磁铁108、固定导磁板109、浮动机构上盖110、浮动机构转轴111、浮动机构转轴支撑座112、电机400、张紧轴114、张紧轴弹簧115、张紧轴上盖116、大从动同步带轮117,外履带板118、内履带板119。
如图3和图4所示,移动本体中间是主体部分,由主体梁101、电器盒102、电器盒套环103构成,主体梁101通过一整个电器盒套环103连接后面的电器盒102,由于主体部分的左右两部分是完全对称,均连接着相同的履带模块,故只说明右端部分,主体梁101通过万向轮104履带模块,所以为柔性结构设计,可以满足对塔桶壁面变曲率环境的灵活运动要求。
履带模块由履带部、带轮部和张紧结构结构组成,
如图5所示,履带部由履带105、外履带板118和内履带板119构成;
带轮部由大主动同步带轮106、大从动同步带轮117和四个小同步带轮107构成;
张紧结构由张紧轴114、张紧轴弹簧115、张紧轴上盖116构成;
在履带内部,由电机驱动大主动同步带轮106转动,并由大主动同步带轮106通过履带105带动小同步带轮107和大从动同步带轮117转动,其中单侧履带105安装有四个结构参数完全相同的小同步带轮107,四个小同步带轮107分为两组,在每组小同步带轮107的中间设置有磁铁108,固定导磁板109设置在磁铁108上,固定导磁板109和磁铁108上设置有上盖110,上盖110上设置有转轴支撑座112,转轴支撑座112上连接有转轴111,转轴111同时与内履带板119和外履带板118连接。
通过安装磁铁108、导磁板固定109、上盖110、转轴111、转轴支撑座112组成的永磁吸附机构,使得履带105可以紧紧贴合在壁面上,满足了对塔桶壁面变曲率环境的稳定吸附并且具备了一定的越障能力。
在履带105的上面安装张紧轴114,张紧轴弹簧115连接在张紧轴114上,张紧轴114和张紧轴弹簧115上盖合有张紧轴上盖116,通过安装有张紧轴114、张紧轴弹簧115、张紧轴上盖116组成的张紧机构,以保证履带105紧紧贴合在壁面上,其中,张紧结构设置有四个,其中两个张紧轴上盖116同时与履带105和所述外履带板118连接,另外两个张紧轴上盖116同时与履带105和内履带板119连接。
如图4和图5所示,作业执行机构2包括固定侧板201、长连接侧板202、筋板203、滚珠丝杠204、电机、连接板206、短连接侧板207、滑台固定板208,其中,两块完全相同的固定侧板201分别连接在外履带板118和内履带板119上,两块完全相同的长连接侧板202通过螺栓与两个固定侧板201分别连接,两个长连接侧板202中间安装有筋板203,以此增加了其操作的稳定性,也保证了精度,在两个长连接侧板202末端安装有一连接板206,连接板206外侧安装有一滚珠丝杠204,滚珠丝杠204末端连接有一电机,电机用于驱动滚珠丝杠204左右移动,在右侧设置有一短连接侧板207,由于比较短,不设置有筋板,也可以保证足够的稳定性与精度,其余结构与另一部分完全相同,作业执行机构采用上下错位布置可以保证两侧末端作业工艺模块的作业区域能够有一定的重复率,避免造成中间区域的遗漏,同时也提高了效率,另外,作业执行机构采用直线滑轨结构,凭借丝杠正反转,实现作业工艺模块的往复运动,以增加作业面积与作业的效率。
如图7所示摄像头系统3包括支架301、安装架302、底座303和摄像头304,支架301通过螺栓连接在电器盒套环103上,安装架302通过螺钉连接固定于支架301末端,底座303和摄像头304固定在一起,并通过螺钉连接固定在摄像头安装架302上,高清云台摄像头304搭载在移动本体1上,可以方便操作人员在地面监测机器人是实时作业情况。
末端作业工艺模块根据作业需求,分为气动角磨除锈模块、气动磨盘拉毛模块、气动喷涂防腐模块三种;三种末端作业工艺模块均可采用快速插接的方式在动作执行机构上进行快速更换,以增加作业的快捷性。
如图8所示,末端作业系统4为气动角磨除锈模块,包括固定滑台板100、第一连接板402、第二连接板403、气缸200、气缸固定板300、角磨机固定板406、气动角磨机407,第一连接板402固定于第二连接板403上,此处为螺钉连接,第一连接板402通过螺钉连接固定于气缸固定板300,气缸100通过螺栓连接固定于气缸固定板300上,角磨机固定板406通过螺纹与气缸200末端连接在一起,在具体的作业过程中,机器人移动本体由于磁吸附和万向轮104的安装会产生一定柔性形变,以适应塔筒的曲率变化,且作业执行机构采用直线滑轨方式,在曲面作业时末端模块与曲面的间距是变化的,此时可通过末端模块的气动加持机构,也就是气缸200,进行距离补偿,同时也可利用该气缸200给气动角磨除锈模块4施加适当的正压力,在移动过程中,气缸抬升,作业模块与壁面不接触,方便机器人快速达到作业位置;作业工程中,气缸下降,对作业模块施加正压力,作业模块与壁面接触,保证作业质量。
如图9所示,所述末端作业系统5为气动磨盘拉毛模块,包括固定滑台板100、第三连接板502、第四连接板503、气缸200、气缸固定板300、拉毛盘固定板506、气动拉毛盘507,所述第三连接板502固定于第四连接板503上,此处为螺钉连接,第三连接板502通过螺钉连接固定于气缸固定板300,气缸200通过螺栓连接固定于气缸固定板300上,拉毛盘固定板506通过螺纹与气缸200末端连接在一起,打磨除锈和磨盘拉毛作业在执行作业工艺机构的设计上,有相同之处,打磨除锈作业采用气动角磨机407,面漆拉毛采用气动拉毛盘507,区别仅在于壁面接触的磨头材质不同,基本结构具有通用性。
如图10所示,所述末端作业系统6为气动喷涂防腐模块,包括固定滑台板100、推杆铰链座602、喷漆前伸连接件603、喷漆杆604、喷枪605,所述推杆铰链座602固定在滑台板100上,喷漆前伸连接件603与推杆铰链座602连接,喷漆杆604固定在喷漆前伸连接件603上端,喷枪605与喷漆杆604固定在一起,喷漆防腐作业采用有气喷涂的形式,包括空气压缩机、储漆罐和喷头,通过管路相互连接,两个喷头分别配备两台空气压缩机,这样能够保证两个喷头喷出的漆雾在压力、流量等工艺参数上的一致性,有利于保证整体喷漆作业的质量,喷漆防腐方式的作业方式与除锈拉毛基本一致,不同之处仅在于喷漆的的喷头是非接触式作业,无需对于壁面的间距进行距离补偿,末端作业模块往复运动,机器人相应的进行上下位置的移动,相互配合完成指定区域的作业任务。
本实施例的工作原理:在使用该适用于风电塔筒外表面维护作业的爬壁机器人时,首先将该爬壁机器人放置到风电塔筒外表面上,在该爬壁机器人上的永磁吸附结构的作用下,通过多块永磁块排列组成的永磁吸附单元使整个爬壁机器人吸附在风电塔筒外表面上,且万向轮连接处为一柔性机构,保证履带是垂直于壁面贴合的,然后通过移动主体上的电机驱动大主动带轮转动,进而驱动履带运动,由于履带贴合在壁面上,故可以带动四个小从动带轮和末端的大从动带轮转动,由于张紧机构的存在,履带时刻紧紧贴合在壁面上,形成连续运动,在执行打磨作业时,末端执行机构的滚珠丝杠带动气动角磨除锈模块左右移动,在移动过程中,气缸抬升,作业模块与壁面不接触,方便机器人快速达到作业位置,作业工程中,气缸下降,对作业模块施加正压力,作业模块与壁面接触,保证作业质量,所以,打磨的上下是由机器人的移动本体控制,左右方向是由滚珠丝杠控制,根据工作需要,三种末端作业工艺模块均可采用快速插接的方式在动作执行机构上进行快速更换,此外,操作人员通过安装在机器人移动本体上的高清云台摄像头在地面监测机器人是实时作业情况,保证工作质量,完成作业,以上便是整个装置的工作过程,且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
- 一种面向风电塔筒维护作业的爬壁机器人
- 一种适用于风电塔筒外表面喷漆作业的爬壁机器人