一种激光去污机器人
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及核电设备技术领域,尤其涉及一种激光去污机器人。
背景技术
随着国内对核电安全、核污染防护处理、应急处理和环境保护等的要求越来越高,相应的技术需求也越来越迫切,尤其是关系到核电安全的放射性污染去污处理技术的需求将越加迫切;在国家中长期科技发展纲要,优先支持的重点领域中,提及核电环保安全防护问题,指出促进环保产业发展,重点研究适合我国国情的重大环保装备及仪器设备,加大国产环保产品市场占有率,提高环保装备技术水平及加强核设施和放射源安全监管,确保核污染与辐射环境安全。
目前,核电站在运行过程中,工件的表面上会粘附有大量具有污染的放射性物质,这些放射性物质积累日益增多,辐射较强,工作人员受辐照剂量增加,因此,需要对该工件定期进行放射性去污,保障核电站安全运行,并降低运行人员集体辐射剂量;但现有激光去污装置对工件进行激光去污,会产生大量的放射性粉尘,若放射性粉尘随着气体排出外界,造成空气污染以及其所产生的核辐射威胁工作人员的生命安全;同时,放射性粉尘飞扬会严重影响激光去污的准确度和强度,导致激光去污效率较低,对工件表面的去污效果较差,无法满足精准去污的需求。
发明内容
本发明的目的是针对现有技术的不足而提供一种激光去污机器人,通过柜体、机械臂、吸风部件、去污组件、旋风分离装置、过滤组件、外部气源和控制器的配合设计,有效解决现有激光去污装置对工件进行激光去污,产生放射性粉尘,污染空气和安全性较低,同时,放射性粉尘的飞扬影响激光去污的准确度和强度,导致激光去污效率较低,对工件表面的去污效果较差,无法满足精准去污的需求等问题。
本发明所采用的技术方案:
一种激光去污机器人,包括柜体和控制器,柜体上设有柜门,柜体内部通过隔板分隔为处理腔和置物腔,隔板的上方和下方分别安装有旋转工作台和电机,电机的输出轴穿过隔板与旋转工作台连接,置物腔的侧壁上拆卸式设有高效空气过滤器,所述处理腔内设有机械臂和若干吸风部件,机械臂上设有去污组件,所述置物腔内设有旋风分离装置、过滤组件和外部气源,吸风部件与旋风分离装置连接,旋风分离装置与过滤组件连接,外部气源分别与旋风分离装置和过滤组件连接,所述控制器分别与电机、机械臂、去污组件和外部气源连接。
进一步的,所述外部气源为空气压缩机,空气压缩机的出气端连接有输风管,输风管分别通过分流管与旋风分离装置和过滤组件连接。
进一步的,所述去污组件包括扫描仪、剂量仪和激光器,控制器分别与扫描仪、剂量仪和激光器连接。
进一步的,所述吸风部件安装在隔板上,吸风部件包括壳体,壳体的顶部和下部分别设有上导流口和下导流口,壳体的底部中央上设有排风口,排风口与旋风分离装置连接,壳体内部设有导向风道,导向风道分别与上导流口、下导流口和排风口连接,导向风道内设有与之转动连接的旋转轴,旋转轴上设有对称式的螺旋毛刷。
进一步的,所述旋风分离装置包括收集部件、旋风分离器和若干第二空气放大器,收集部件由外筒和内筒组成,外筒和内筒的顶部均设计为开口,内筒安装在外筒内,内筒和外筒的底部之间通过支撑块连接,旋风分离器包括导向筒体,导向筒体上部的侧壁上间隔设有若干进料口,导向筒体上部的中央设有排出通道,导向筒体内设有绕着排出通道外部由上至下依次递减的螺旋状导向板,导向筒体的下部上设有出料口,导向筒体与外筒顶部拆卸式连接,导向筒体的下部延伸至内筒内部并与内筒的顶部紧密连接,第二空气放大器的进气口通过导流管与吸风部件连接,第二空气放大器的出气口与导向筒体的进料口拆卸式连接,第二空气放大器的进风口通过分流管与输风管连接。
进一步的,所述导向筒体的上部设计为圆柱状结构,导向筒体的下部设计为漏斗状结构。
进一步的,所述导向板上设有位于进料口处的引流板。
进一步的,所述过滤组件包括过滤筒和吸附筒,过滤筒内部设有滤芯,吸附筒内部填充有活性炭,过滤筒的进风端与旋风分离装置连接,过滤筒的出风端与吸附筒的进风端连接,吸附筒的出风端上设有第一空气放大器,第一空气放大器通过分流管与空气压缩机连接。
进一步的,所述柜体与柜门滑动连接。
进一步的,所述柜门上设有开关检测传感器,所述开关检测传感器包括发光元件和光接收元件,发光元件安装在柜门上,发光元件和设置在柜体上的光接收元件相对应,光接收元件与控制器连接。
与现有技术相比,本发明的有益效果是:
1、本发明通过柜体、机械臂、吸风部件、去污组件、旋风分离装置、过滤组件、外部气源和控制器的配合设计,有效解决现有激光去污装置对工件进行激光去污,产生放射性粉尘,污染空气和安全性较低,同时,放射性粉尘的飞扬影响激光去污的准确度和强度,导致激光去污效率较低,对工件表面的去污效果较差,无法满足精准去污的需求等问题。
2、通过去污组件对工件进行计算机虚拟环境下模拟激光去污扫描路径和运行脉冲宽度,虚拟环境下检测机械臂运行过程中的状况,对不可达区域的周边边界进行标记和框选,并对工件进行激光去污。
3、壳体的上导流口和下导流口将处理腔的气体吸入其中,旋转轴带动螺旋毛刷转动,利用螺旋毛刷将壳体内的气体推送至排风口,由排风口排出,同时,螺旋毛刷可有效对导向风道进行清扫,具有自清洁的作用。
4、气体进入旋风分离装置的导向筒体,该气体沿着导向板在导向筒体内进行高速螺旋流动,促进颗粒物和粉尘落入内筒的底部,沉淀至内筒底部,并统一收集。
5、本发明通过外部气源向旋风分离装置输送气体,由于旋风分离装置与吸风部件连通,使吸风部件产生负压,能够有效吸入带有放射性粉尘的气体,该气体进入旋风分离装置后,气体中的放射性粉尘和固体颗粒物沉淀至旋风分离装置底部,其余气体中的微小放射性粉尘和颗粒物流动至过滤组件,过滤组件对该气体进行过滤和吸附微小放射性物质,使得该气体排出至外界时,较为干净,避免污染空气。
附图说明
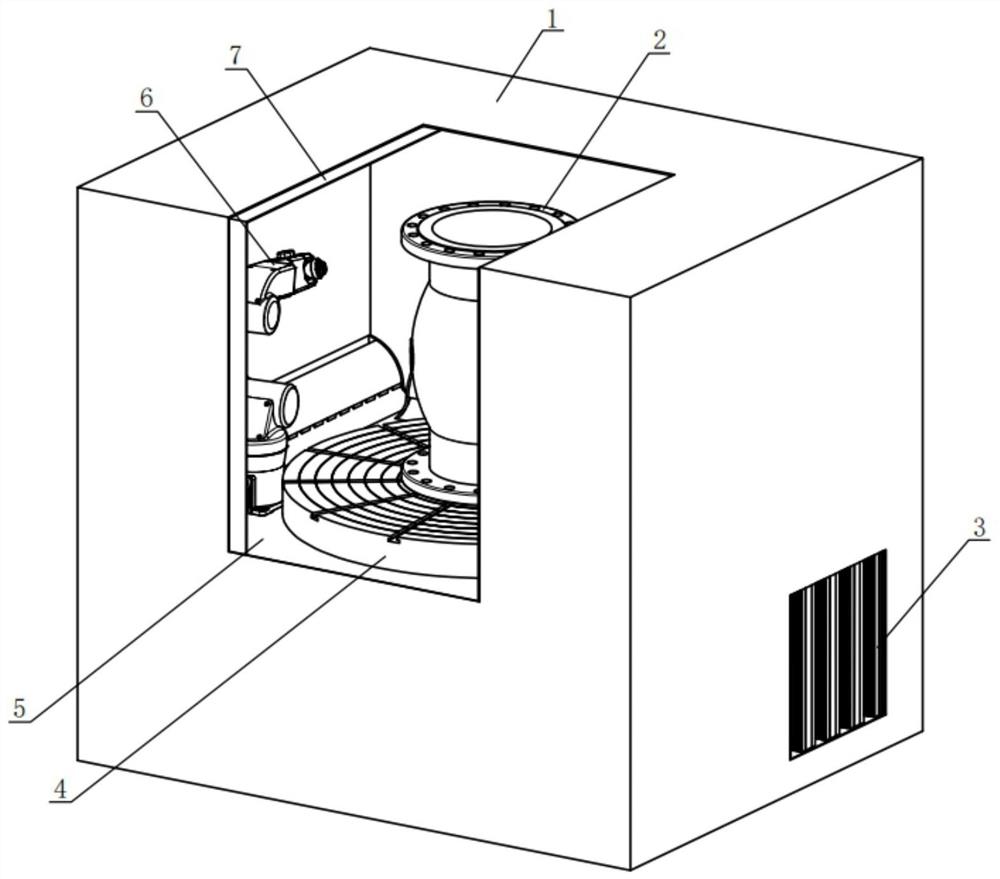
图1为实施例一的整体结构示意图;
图2为实施例一内部的结构示意图一;
图3为实施例一内部的结构示意图二;
图4为实施例一吸风部件的结构示意图;
图5为实施例一旋风分离装置的立体图;
图6为实施例二的结构示意图及其A处的放大图;
图7为实施例三的结构示意图及其B处的放大图;
图中:1、柜体;2、工件;3、高效空气过滤器;4、旋转工作台;5、隔板;6、机械臂;7、柜门;8、吸风部件;801、壳体;802、上导流口;803、下导流口;804、排风口;805、旋转轴;806、螺旋毛刷;807、导向风道;901、吸附筒;902、过滤筒;10、电机;11、旋风分离装置;12、空气压缩机;13、导流管;14、分流管;15、输风管;16、第一密封套;17、第一空气放大器;18、旋风分离器;19、外筒;20、进风口;21、引流板;22、导向板;23、凸台;24、排出通道;25、第二密封套;26、导向筒体;27、内筒;28、支撑块;29、第二空气放大器。
具体实施方式
为了更好理解本发明技术内容,下面提供具体实施例,并结合附图对本发明做进一步的说明。
实施例一
参见图1至5,本发明提供一种激光去污机器人,包括柜体1和控制器,柜体1上设有柜门7,在使用时,将柜门7打开,方便借助吊装工具将工件2吊运至旋转工作台4上,并对工件2进行固定,再关紧柜门7,柜体1内部通过隔板5分隔为处理腔和置物腔,处理腔位于置物腔的上方,处理腔用于放置待去污的工件2,置物腔为其余设备提供安装的空间,隔板5的上方和下方分别安装有旋转工作台4和电机10,电机10的输出轴穿过隔板5与旋转工作台4连接,电机10通过输出轴驱动旋转工作台4转动,置物腔的侧壁上拆卸式设有高效空气过滤器3,置物腔内的气体经过高效空气过滤器3再向外排出,对排出的气体进行净化处理,采用拆卸式方式连接,将其拆下,便于工作人员进入置物腔对安装在其中的设备逐一进行检修,处理腔内设有机械臂6和三个吸风部件8,吸风部件8间隔安装在旋转工作台4的外周,机械臂6上设有去污组件,机械臂6为本领域技术人员的常规技术手段,在此就不一一详细阐述,机械臂6带动去污组件在处理腔内进行工作,吸风部件8工作,吸风部件8使处理腔产生负压,可将处理腔内的放射性粉尘和气体吸入其中,置物腔内设有旋风分离装置11、过滤组件和外部气源,吸风部件8与旋风分离装置11连接,旋风分离装置11与过滤组件的进风端连接,外部气源分别与旋风分离装置11和过滤组件连接,控制器的输出端分别与电机10、机械臂6、去污组件和外部气源信号连接,控制器将相应的指令发送至电机10、机械臂6和去污组件,电机10驱动旋转工作台4在处理腔内转动,去污组件启动工作,机械臂6带动去污组件对旋转工作台4上的工件2进行精确去污,具体的,通过外部气源向旋风分离装置11输送气体,由于旋风分离装置11与吸风部件8连通,使吸风部件8产生负压,能够有效吸入带有放射性粉尘的气体,该气体进入旋风分离装置11后,气体中的放射性粉尘和固体颗粒物沉淀至旋风分离装置11底部,其余气体中的微小放射性粉尘和颗粒物流动至过滤组件,过滤组件对该气体进行过滤和吸附微小放射性物质,使得该气体排出至外界时,较为干净,避免污染空气。
优选地,外部气源为空气压缩机12,空气压缩机12的出气端连接有输风管15,输风管15分别通过分流管14与旋风分离装置11和过滤组件连接,空气压缩机12压缩气体,并将气体通过输风管15输送至旋风分离装置11和过滤组件,使旋风分离装置11和过滤组件产生负压,旋风分离装置11通过吸风部件8将处理腔内的放射性粉尘和气体吸入其中,由于旋风分离装置11与过滤组件连接,过滤组件产生负压,会有效将旋风分离装置11输送至过滤组件的气体吸出,而过滤组件亦会对该气体进行多次过滤,再排放出去,过滤效果较好,有效避免核辐射粉尘直接排放,容易危害人体健康,污染周围的空气。
优选地,去污组件包括扫描仪、剂量仪和激光器,控制器分别与扫描仪、剂量仪和激光器连接,控制器分别将执行指令发送至扫描仪、剂量仪和激光器,扫描仪为三维扫描仪,激光器为光纤激光器,启动三维扫描仪,对待去污工件2进行模型扫描和数据处理,建立三维模型,使用剂量仪测量工件2表面接触剂量率,预设扫描参数,计算机虚拟环境下模拟激光去污扫描路径和运行脉冲宽度,虚拟环境下检测机械臂6运行过程中的状况,对不可达区域的周边边界进行标记和框选,最后,启动光纤激光器对工件2进行激光去污。
优选地,吸风部件8安装在隔板5上,吸风部件8包括壳体801,壳体801的顶部和下部分别设有上导流口802和下导流口803,壳体801的底部中央上设有排风口804,排风口804穿过隔板5,排风口804通过导流管13与旋风分离装置11连接,壳体801内部设有导向风道807,导向风道807分别与上导流口802、下导流口803和排风口804连接,导向风道807内设有与之转动连接的旋转轴805,旋转轴805上设有对称式的螺旋毛刷806,螺旋毛刷806通过排风口804的负压、上导流口802和下导流口803之间的气压推动,使得带螺旋毛刷806的旋转轴805进行旋转,在旋转的过程中,通过上导流口802和下导流口803吸入处理腔内带有粉尘的气体,两股气流分别作用在螺旋毛刷806上,由于螺旋毛刷806为对称式设置,利用螺旋毛刷806将导向风道807内的放射性粉尘和气体输送至排风口804处,由排风口804排出;壳体801为长杆状结构,上导流口802和下导流口803均匀分散,可将处理腔内的气体均匀吸入,避免壳体801的导向风道807出现放射性粉尘和固体颗粒物的积累和沉降,另外,螺旋毛刷806具有柔性,对导向风道807内壁的磨损较小,并且,旋转轴805在转动的过程中,可有效对导向风道807进行清扫,具有自清洁的作用。
优选地,旋风分离装置11包括收集部件、旋风分离器18和三个第二空气放大器29,收集部件由外筒19和内筒27组成,外筒19采用射线屏蔽材料制成,射线屏蔽材料优选铅或其合金材料,内筒27采用防腐蚀金属材质制成,防腐蚀金属材质优选不锈钢,外筒19和内筒27的顶部均设计为开口,内筒27安装在外筒19内,操作方便,安装便捷,内筒27和外筒19的底部之间通过支撑块28连接,利用支撑块28对内筒27进行支撑,防止外筒19内部湿气冷凝后,内筒27浸泡在其中,旋风分离器18包括导向筒体26,导向筒体26上部的侧壁上间隔设有三个进料口,导向筒体26上部的中央设有排出通道24,排出通道24与过滤组件连接,通过排出管道可有效将内筒27的气体输送至过滤组件,经过滤,再将其排出,导向筒体26内设有绕着排出通道24外部由上至下依次递减的螺旋状导向板22,导向筒体26的下部上设有出料口,出料口亦可以是等距间隔上下错开设置,导向筒体26与外筒19顶部拆卸式连接,方便安装和拆卸,方便及时处理内筒27的放射性粉尘,导向筒体26的下部延伸至内筒27内部并与内筒27的顶部紧密连接,紧密贴合防止放射性粉尘泄露,第二空气放大器29设计为管道状结构,第二空气放大器29的进气口通过导流管13与吸风部件8连接,第二空气放大器29的出气口与导向筒体26的进料口拆卸式连接,便于安装和拆卸,可以采用螺纹、法兰、插入式、锁扣、压合锁紧等连接方式,第二空气放大器29的进风口20通过分流管14与空气压缩机12的输风管15连接,空气压缩机12通过输风管15和分流管14将所压缩的空气输送至第二空气放大器29,使第二空气放大器29产生负压,第二空气放大器29经导流管13,将吸风部件8所吸入的气体输送至导向筒体26,气体中夹带有颗粒物和放射性粉尘,利用导向板22使导向筒体26内的气体高速螺旋流动,促进颗粒物和粉尘落入内筒27的底部,由于颗粒物和放射性粉尘具有一定重力,沉淀至内筒27底部,便于内筒27统一收集。
优选地,导向筒体26的上部设计为圆柱状结构,导向筒体26的下部设计为漏斗状结构,导向筒体26上部的外壁上铺设有铅质屏蔽层,对进入旋风分离器18内的放射性粉尘进行屏蔽,放射性粉尘和气体进入导向筒体26,由于导向筒体26下部设计为漏斗状结构,便于放射性粉尘和气体通过出料口落入内筒27。
优选地,导向板22上设有位于进料口处的引流板21,引流板21与进料口的数量相同,通过引流板21可以引导放射性粉尘和气体沿着导向板22流动,具有导向作用。
优选地,过滤组件包括过滤筒902和吸附筒901,过滤筒902内部设有滤芯,吸附筒901内部填充有活性炭,过滤筒902的进风端与旋风分离装置11连接,过滤筒902的出风端与吸附筒901的进风端连接,吸附筒901的出风端上设有第一空气放大器17,第一空气放大器17的进风口20通过分流管14与空气压缩机12的输风管15连接,由于空气压缩机12所压缩的气体通过输风管15输送至第一空气放大器17,使吸附筒901的出风端产生负压,旋风分离装置11内的气体在压力差的作用下,该气体依次进入过滤筒902和吸附筒901,利用过滤筒902内的滤芯对其进行高效过滤,通过物理过滤的方式,将气体中的细小放射性粉尘和固定颗粒物进行过滤去除,进入到活性炭吸附环节,活性炭将气体中存在的烟尘放射性物质进行吸附处理,将污染物质进行截留,过滤后的气体含有的放射性成分将大大降低,有效防止未经过滤和吸附处理的气体排出后,对其周围环境和空气造成严重的污染,降低放射性物质对环境以及操作人员的损害。
优选地,柜体1与柜门7滑动连接,将柜门7推向一侧,打开柜门7,便于使用吊装工具对工件2进行吊运至柜体1的旋转工作台4上。
优选地,柜门7设置有把手,通过把手可方便将柜门打开,操作方便,省力;另外,可在柜门7上增设玻璃观察口,便于观察柜体1内对工件2的去污状况。
优选地,柜门7上设有开关检测传感器,开关检测传感器包括发光元件和光接收元件,发光元件安装在柜门7上,发光元件与设置在柜体1上的光接收元件相对应,光接收元件与控制器连接。柜门7打开时,柜门7的发光元件与柜体1上的光接收元件对齐,光接收元件接收到脉冲信号,并将该信号发送给控制器,通过控制器提升空气压缩机12的功率,增加空气压缩机12的出风量,以便增强处理腔内的负压,使处理腔内残余粉尘不流出处理腔;反之,柜门7关闭后,光接收元件接收不到发光元件发射出的脉冲光信号,光接收元件将该讯息发送给控制器,控制器适当降低空气压缩机12的功率。
本发明的工作原理为:
对工件2的表面进行去污时,将柜门7打开,借助吊装工具将工件2吊运至旋转工作台4上,并对工件2进行固定,再关紧柜门7,控制器分别将相关指令发送给电机10、机械臂6、空气压缩机12、扫描仪、剂量仪和激光器,电机10驱动旋转工作台4在处理腔内转动,机械臂6带动扫描仪、剂量仪和激光器进行工作,具体的,启动扫描仪,对待去污工件2进行模型扫描和数据处理,建立三维模型,使用剂量仪测量工件2表面接触剂量率,预设扫描参数,计算机虚拟环境下模拟激光去污扫描路径和运行脉冲宽度,虚拟环境下检测机械臂6运行过程中的状况,对不可达区域的周边边界进行标记和框选,利用激光器对工件2进行激光去污。
激光机器人在去污的过程中,会产生大量的放射性粉尘,放射性粉尘与处理腔内的气体混合,为避免处理腔内的气体直接排放,污染周围的环境和空气,需要对该气体进行有效处理,具体的:空气压缩机12启动工作,空气压缩机12压缩气体,并将压缩的气体通过输风管15和分流管14输送至第二空气放大器29和第一空气放大器17,第二空气放大器29和第一空气放大器17分别产生负压,进而使壳体801和吸附筒901的出风端产生负压,壳体801通过上导流口802和下导流口803将处理腔内的气体吸入其中,两股气流共同作用在螺旋毛刷806,并使之发生转动,由于螺旋毛刷806在旋转轴805上是对称式结构,旋转轴805带动螺旋毛刷806转动后,利用螺旋毛刷806将带有放射性粉尘和气体的气体推送至排风口804处,该气体经导流管13输送至导向筒体26,由于导向筒体26的导向板22具有导向作用,进入导向筒体26的气体沿着导向板22进行高速螺旋流动,气体中的固体颗粒物和放射性粉尘落入内筒27的底部,固体颗粒物和放射性粉尘具有一定重力,沉淀至内筒27底部,便于统一收集;与此同时,气体中的其余微小放射性粉尘和颗粒物,流经滤筒902和吸附筒901,过滤筒902内的滤芯对该气体进行高效过滤,利用物理过滤的方式,将气体中的细小固体颗粒物和放射性粉尘进行过滤去除,进入到活性炭吸附环节,活性炭将气体中存在的放射性物质进行吸附处理,将污染物质进行截留,过滤后的气体含有的放射性成分将大大降低,最后,该气体通过吸附筒901的出风端排放至置物腔,经高效空气过滤器3排至外界。
实施例二
参见图6,本实施例与实施例一的区别在于:导向筒体26下部的外壁上套设有第一密封套16,第一密封套16套装在内筒27的顶部上,通过第一密封套16有效提高导向筒体26与内筒27的密封性,防止放射性粉尘从内筒27顶部泄露,起到密封作用。
导向筒体26上部外壁套设有凸台23,凸台23上设有第二密封套25,第二密封套25设在外筒19顶部上,并与之紧密贴合;增设第二密封套25有效提高导向筒体26与外筒19连接的密封性,防止放射性粉尘从外筒19开口处泄露,起到双重密封作用。
实施例三
参见图7,本实施例与实施例二的区别在于:导向筒体26上部的外壁上设有外螺纹,外筒19的顶部内壁上设有与之对应的内螺纹,导向筒体26与外筒19之间螺纹连接,采用螺纹连接方式,结构简单、便于拆卸、安装稳定、成本低,同时也不易泄露。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种激光去污机器人
- 一种激光去污机器人的旋风分离装置