故障现场信息存储方法及装置
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及计算机技术领域,特别是涉及一种故障现场信息存储方法及装置。
背景技术
当前国内各大城市的电网设备数量众多且形式多样,部分城市输变电设备由于长期重载运行极易引发设备事故,沿海城市频发的台风也会对电网设备造成危害。对此,做好故障现场信息记录对后续电网设备的故障分析、抢救等有重要意义。
现有的故障现场记录方式主要通过技术人员在现场进行文档记录和影像记录,这种人为记录方式易导致记录的信息疏漏或出错,且信息维度单一,难以直观体现现场的故障重点,因而无法为后续故障抢修提供全面而准确的信息支持。
发明内容
针对上述技术问题,本发明提供一种故障现场信息存储方法及装置,通过将信息准确存储在构建的故障现场三维虚拟场景中,多维度保留了实际现场的相关故障信息,且信息查看方式更加直观全面。
本发明提供一种故障现场信息存储方法,包括:
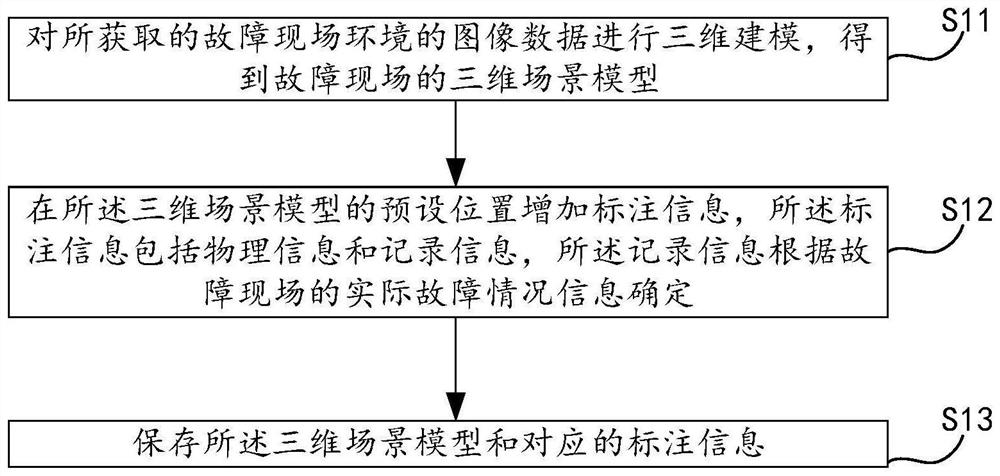
对所获取的故障现场环境的图像数据进行三维建模,得到故障现场的三维场景模型;
在所述三维场景模型的预设位置增加标注信息,所述标注信息包括物理信息和记录信息,所述记录信息根据故障现场的实际故障情况信息确定;
保存所述三维场景模型和对应的标注信息。
可选的,所述方法可利用增强现实设备获取故障现场环境的图像数据。
可选的,利用SLAM技术对所获取的故障现场环境的图像数据进行三维建模,得到故障现场的三维场景模型,其具体包括:
提取所述图像数据的位置信息和所述增强现实设备的位姿信息;
利用所述位置信息和所述位姿信息构建所述故障现场地图;
根据所述位置信息、所述位姿信息和所述地图得到所述故障现场的三维场景模型。
可选的,在所述三维场景模型中,对所述预设位置的方向发射一条射线,当所述射线与目标标注物体发生碰撞时,在所述碰撞点处增加标注信息。
可选的,所述物理信息包括:故障当日的日期和天气、故障现场的地理位置以及所述增强现实设备的硬件信息。
可选的,所述记录信息包括:故障空间锚点、抢修工作人员的语音注释和文字注释。
本发明还提供一种故障现场信息存储装置,包括:
模型构建模块,用于对所获取的故障现场环境的图像数据进行三维建模,得到故障现场的三维场景模型;
信息标注模块,用于在所述三维场景模型的预设位置增加标注信息,所述标注信息包括物理信息和记录信息,所述记录信息根据故障现场的实际故障情况信息确定;
信息存储模块,用于保存所述三维场景模型和对应的标注信息。
可选的,所述装置可利用增强现实设备获取故障现场环境的图像数据。
可选的,所述信息标注模块还用于:
在所述三维场景模型中,对所述预设位置的方向发射一条射线,当所述射线与目标标注物体发生碰撞时,在所述碰撞点处增加标注信息。
本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上述任一个实施例所述的故障现场信息存储方法。
相比现有技术,本发明的有益效果在于:
本发明提供的故障现场信息存储方法及装置构建了故障现场的三维虚拟场景模型,并将故障现场的环境信息、位置信息和故障信息等以标注的形式在三维虚拟场景模型中的对应位置进行精准标记,有效存储了实际现场多个维度的故障信息,且信息的查看方式更加直观和全面。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的故障现场信息存储方法流程示意图;
图2是本发明实施例提供的故障现场信息存储装置结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应当理解,文中所使用的步骤编号仅是为了方便描述,不对作为对步骤执行先后顺序的限定。
应当理解,在本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
如图1所示,本发明一个实施例提供一种方法,包括下述步骤。
S11:对所获取的故障现场环境的图像数据进行三维建模,得到故障现场的三维场景模型。
在一个实施例中,可利用增强现实设备获取故障现场环境的图像数据。
增强现实设备内置TOF相机、双鱼眼相机、RGB相机和温湿度传感器、红外传感器以及雷达传感器等多种传感器,可为现场环境感知提供数据输入。
在一个实施例中,可利用SLAM技术对所获取的故障现场环境的图像数据进行三维建模,得到故障现场的三维场景模型。
具体地,可使用视觉SLAM算法进行三维重建:首先提取所述图像数据的位置信息和所述增强现实设备的位姿信息,利用所述位置信息和所述位姿信息构建所述故障现场地图,根据所述位置信息、所述位姿信息和所述地图得到所述故障现场的三维场景模型。
SLAM技术可利用设备外部传感器所获取的环境感知数据构建场景周围的环境图,同时获取设备在环境图中的位置,并随着设备的移动进行环境图的增量式构建与设备的连续定位。
视觉SLAM的处理流程可分为前端处理、后端处理及闭环检测:前端处理负责将采集的图像数据与环境地标物的数据关联,以及与参数的初始化;后端处理负责对观测数据进行环境图结果与定位参数的最优估计,以获取高精度的定位与制图结果;闭环检测用于判断当前观测到的环境地标是否已被观测过,可消除长距离运动后的误差累计。
在该实施例中,可利用联想晨星AR眼镜获取故障现场环境的图像数据,并利用AR眼镜内置的视觉SLAM算法进行外部环境的快速三维重建,并将重建的三维影像导出为三维场景模型。
在一个实施例中,所构建的三维场景模型1:1还原实际的故障现场,有利于提高后续的故障分析效率和抢救工作效率。
本发明上述实施例构建的三维场景模型可用于准确存储现实故障世界的环境场景结构信息。
S12:在所述三维场景模型的预设位置增加标注信息,所述标注信息包括物理信息和记录信息,所述记录信息根据故障现场的实际故障情况信息确定。
在一个实施例中,可在三维场景模型中对预设位置的方向发射一条射线,当射线与目标标注物体发生碰撞时,在碰撞点处增加标注信息。
具体地,可将三维场景模型导入Unity场景中,利用射线检测在三维场景模型中的指定位置的方向发射一条射线,当射线与目标标注物体发生碰撞时,将碰撞点作为标注位置并增加标注信息。
在一个实施例中,物理信息包括故障当日的日期和天气、故障现场的地理位置以及所述增强现实设备的硬件信息;记录信息包括故障空间锚点、抢修工作人员的语音注释和文字注释。
物理信息主要用于保存现实故障世界的天气、经纬度、日期和设备IOT信息等外界客观信息;记录信息则主要用于在三维场景模型的指定位置或相同位置,保存故障现场工作人员针对故障实际情况的人为标注信息,包括语音和文字注释信息。
S13:保存所述三维场景模型和对应的标注信息。
本发明实施例在1:1还原现场故障的基础上构建三维场景,并将真实且齐全的多维度标注信息在三维场景中精确记录,既进一步增强了信息维度,又可为后续的现场故障分析、故障抢修提供更全面的现场信息,加快故障排除效率。
如图2所示,本发明另一个实施例提供故障现场信息存储装置,包括模型构建模块101、信息标注模块102和信息存储模块103。
模型构建模块101用于对所获取的故障现场环境的图像数据进行三维建模,得到故障现场的三维场景模型。
信息标注模块102用于在所述三维场景模型的预设位置增加标注信息,所述标注信息包括物理信息和记录信息,所述记录信息根据故障现场的实际故障情况信息确定。
信息存储模块103用于保存所述三维场景模型和对应的标注信息。
上述装置内的各模块之间信息交互、执行过程等内容,由于与本发明方法实施例基于同一构思,具体内容可参见本发明方法实施例中的叙述,此处不再赘述。
本发明实施例还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上述任一个实施例所述的故障现场信息存储方法。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于计算机可监听存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(Read-Only Memory,ROM)或随机存储记忆体(Random AccessMemory,RAM)等。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 故障现场信息存储方法及装置
- 一种监控平台故障信息的存储方法、装置及可读介质