一种基于关键点检测的均压环倾斜故障识别方法及装置
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及电力巡检技术领域,尤其涉及一种基于关键点检测的均压环倾斜故障识别方法及装置。
背景技术
均压环是输电线路中一种常见的电器,常常安装在绝缘子的底端。均压环的主要目的是改善绝缘子串中绝缘子的电压分布,降低第一片绝缘子的劣化率,目前110kV及以上均有采用均压环。在线路施工中,由于圆环型铝制均压环较为柔软,容易发生变形,一旦均压环发生倾斜就极大的影响复合绝缘子的电场分布,使均压环不能发挥应有的作用,而且一旦均压环倾斜角度过大也将会影响输电线路的正常工作。所以在对输电线路进行巡检的过程中,还需要对均压环是否发生倾斜进行检测,以确保均压环能够始终处于水平的状态。
无人机技术没有应用到电力巡检之前,对均压环是否倾斜的检查多是通过人工凭借工作经验进行判断,这样的判断方法常常会存在较大的人工误差,因为人工很难以发现倾角较小的倾斜情况,而且如果放任这种小角度倾斜的存在到最后很容易加大该倾斜角度而影响均压环的正常使用,除了存在较大的误差之外,人工在检测过程中还需要攀爬到输电线路上,危险性较高。
随着无人机技术的发展,电力杆塔巡检已经普遍采用无人机。专利文献CN11159889A,公开了一种均压环倾斜故障的识别方法、装置、计算机设备,具体公开了:采集电力杆塔巡检图像,识别该电力杆塔巡检图像中的均压环区域,并通过边缘检测算法识别均压环区域中均压环轮廓和均压环所在绝缘子支架轮廓,根据均压环轮廓和均压环所在绝缘子支架轮廓计算均压环的倾斜角。该方案中计算的倾斜角为均压环轮廓最小拟合图形的对称轴所在的第一直线与绝缘子支架轮廓的最小拟合图形的对称轴长轴所在的第二直线的夹角,以绝缘子支架为参照物,如果绝缘子支架的位置出现了偏移,势必会造成夹角计算的不准确,出现误判。
发明内容
本发明提供了一种基于关键点检测的均压环倾斜故障识别方法及装置,能够有效提高对均压环倾斜故障识别的准确性。
一种基于关键点检测的均压环倾斜故障识别方法,包括:
获取预先存储的无人机初始位置信息,控制无人机飞行至无人机初始位置;
控制无人机对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得当前正视平面角度图像和当前俯视平面角度图像;
将所述当前正视平面角度图像和当前俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述当前正视平面角度图像和当前俯视平面角度图像上均压环的关键点;
根据所述当前正视平面角度图像和当前俯视平面角度图像建立坐标系,确定所述均压环上关键点的当前位置坐标;
将所述均压环上关键点的当前位置坐标与预先存储的关键点初始位置坐标进行比较,根据比较结果进行均压环的倾斜故障识别。
进一步地,训练获得关键点识别模型,包括:
构建神经网络模型;
将均压环样本图像进行关键点标记,根据标记后的均压环样本图像对所述神经网络模型进行训练直到模型收敛,获得所述关键点识别模型。
进一步地,获取预先存储的无人机初始位置信息之前,还包括:
控制无人机对均压环进行初始拍摄,对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得初始正视平面角度图像和初始俯视平面角度图像,将无人机的当前位置信息作为无人机初始位置信息并存储;
将所述初始正视平面角度图像和初始俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述初始正视平面角度图像和初始俯视平面角度图像上均压环的关键点;
根据所述初始正视平面角度图像和初始俯视平面角度图像建立坐标系,确定所述均压环上的关键点初始位置坐标;
将所述关键点初始位置坐标进行存储。
进一步地,根据所述当前正视平面角度图像和当前俯视平面角度图像建立坐标系,确定所述均压环上关键点的当前位置坐标,包括:
在所述当前正视平面角度图像上建立XY坐标系;
在所述当前俯视平面角度图像上建立ZX坐标系;
将所述XY坐标系和所述ZX坐标系进行合并,形成XYZ坐标系;
在所述XYZ坐标系下确定所述关键点的当前X轴坐标、当前Y轴坐标和当前Z轴坐标。
进一步地,所述关键点初始位置坐标包括初始X轴坐标、初始Y轴坐标和初始Z轴坐标;
将所述均压环上关键点的当前位置坐标与预先存储的关键点初始位置坐标进行比较,根据比较结果进行均压环的倾斜故障识别,包括:
将所述关键点的当前X轴坐标、当前Y轴坐标和当前Z轴坐标分别与所述初始X轴坐标、初始Y轴坐标和初始Z轴坐标进行比较,根据比较结果确定关键点的偏移方向和偏移量。
进一步地,根据比较结果确定关键点的偏移方向,包括:
关键点的当前X轴坐标大于初始X轴坐标,则确定关键点向X轴的正方向偏移;关键点的当前X轴坐标小于初始X轴坐标,则确定关键点向X轴的反方向偏移;
关键点的当前Y轴坐标大于初始Y轴坐标,则确定关键点向Y轴的正方向偏移;关键点的当前Y轴坐标小于初始Y轴坐标,则确定关键点向Y轴的反方向偏移;
关键点的当前Z轴坐标大于初始Z轴坐标,则确定关键点向Z轴的正方向偏移;关键点的当前Z轴坐标小于初始Z轴坐标,则确定关键点向Z轴的反方向偏移。
进一步地,根据比较结果确定关键点的偏移量,包括:
将当前X轴坐标和初始X轴坐标的差值确定为关键点在X轴方向上的偏移量;
将当前Y轴坐标和初始Y轴坐标的差值确定为关键点在Y轴方向上的偏移量;
将当前Z轴坐标和初始Z轴坐标的差值确定为关键点在Z轴方向上的偏移量。
进一步地,所述关键点的位置包括位于均压环上正东、正西、正南、正北、东南、西南、东北、西北方位中的至少一种。
一种基于关键点检测的均压环倾斜故障识别装置,包括:
无人机控制模块,用于获取预先存储的无人机初始位置信息,控制无人机飞行至无人机初始位置;
图像采集控制模块,用于控制无人机对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得当前正视平面角度图像和当前俯视平面角度图像;
关键点识别模块,用于将所述当前正视平面角度图像和当前俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述当前正视平面角度图像和当前俯视平面角度图像上均压环的关键点;
坐标确定模块,用于根据所述当前正视平面角度图像和当前俯视平面角度图像建立坐标系,确定所述均压环上关键点的当前位置坐标;
倾斜故障识别模块,用于将所述均压环上关键点的当前位置坐标与预先存储的关键点初始位置坐标进行比较,根据比较结果进行均压环的倾斜故障识别。
一种电子设备,包括处理器和存储器,所述存储器存储有多条指令,所述处理器用于读取所述指令并执行上述的方法。
本发明提供的基于关键点检测的均压环倾斜故障识别方法及装置,至少包括如下有益效果:
(1)通过无人机采集图像识别均压环的倾斜故障代替人工作业,提高识别的准确性,避免人工作业带来的安全问题;
(2)通过关键点识别模型进行均压环的关键点识别,并通过关键点的位置获得均压环的偏移量和偏移方向,准确性更高,解决现有技术中的误判问题,识别效率高,对于微小倾斜偏移也能够识别,识别精度高。
附图说明
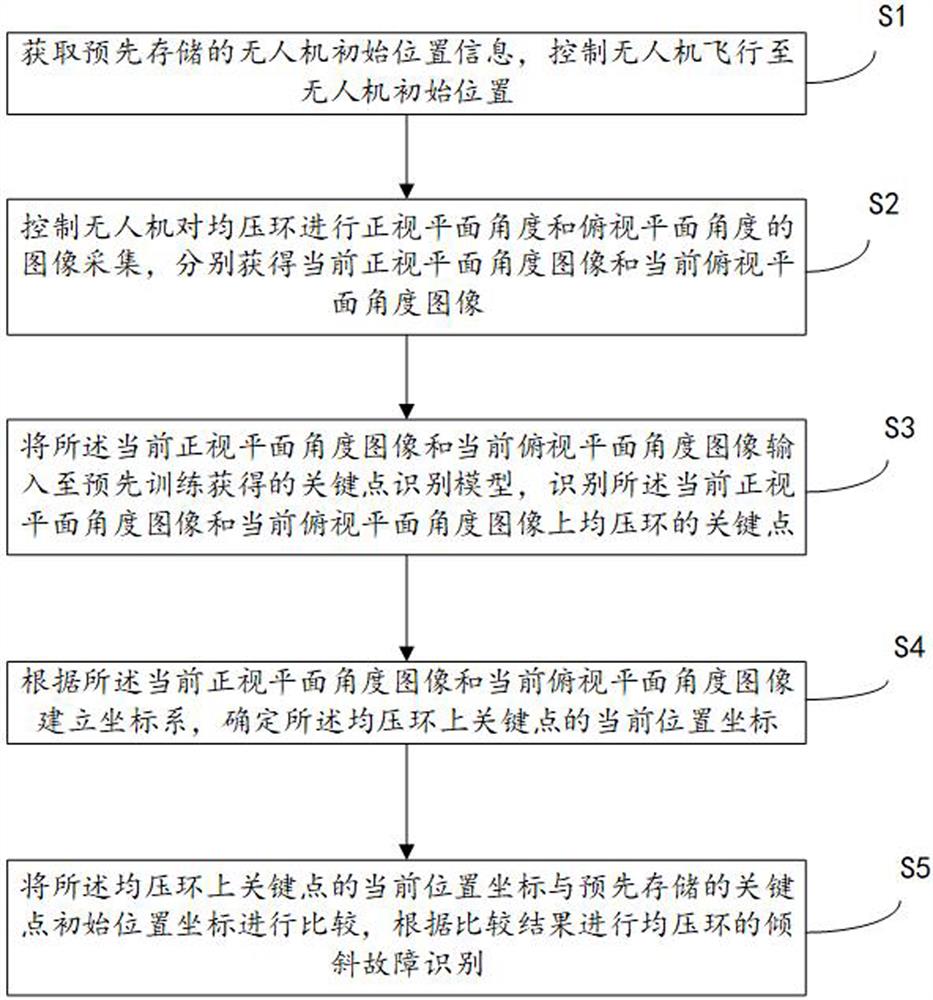
图1为本发明提供的基于关键点检测的均压环倾斜故障识别方法一种实施例的流程图。
图2为本发明提供的基于关键点检测的均压环倾斜故障识别装置一种实施例的结构示意图。
具体实施方式
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
实施例一
参考图1,本实施例提供一种基于关键点检测的均压环倾斜故障识别方法,包括:
S1、获取预先存储的无人机初始位置信息,控制无人机飞行至无人机初始位置;
S2、控制无人机对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得当前正视平面角度图像和当前俯视平面角度图像;
S3、将所述当前正视平面角度图像和当前俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述当前正视平面角度图像和当前俯视平面角度图像上均压环的关键点;
S4、根据所述当前正视平面角度图像和当前俯视平面角度图像建立坐标系,确定所述均压环上关键点的当前位置坐标;
S5、将所述均压环上关键点的当前位置坐标与预先存储的关键点初始位置坐标进行比较,根据比较结果进行均压环的倾斜故障识别。
进一步地,在执行步骤S1之前,需预先训练获得关键点识别模型,具体包括:
构建神经网络模型;
将均压环样本图像进行关键点标记,根据标记后的均压环样本图像对所述神经网络模型进行训练直到模型收敛,获得所述关键点识别模型。
作为一种优选的实施方式,关键点可以选取多个,例如选取的关键点的位置包括位于均压环上正东、正西、正南、正北、东南、西南、东北、西北方位中的至少一种。
进一步地,在执行步骤S1之前,还需对均压环的初始位置坐标进行标定,具体包括:
控制无人机对均压环进行初始拍摄,对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得初始正视平面角度图像和初始俯视平面角度图像,将无人机的当前位置信息作为无人机初始位置信息并存储;
将所述初始正视平面角度图像和初始俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述初始正视平面角度图像和初始俯视平面角度图像上均压环的关键点;
根据所述初始正视平面角度图像和初始俯视平面角度图像建立坐标系,具体包括:在初始正视平面角度图像上建立XY坐标系,在初始俯视平面角度图像建立ZX坐标系,将XY坐标系和所述ZX坐标系进行合并,形成XYZ坐标系。
建立XYZ坐标系后,可确定均压环上的关键点初始位置坐标,包括初始X轴坐标、初始Y轴坐标和初始Z轴坐标,将所述关键点初始位置坐标进行存储。
进一步地,步骤S1中,无人机初始位置即为无人机初始拍摄时的位置,保证后续拍摄和初始拍摄时无人机位置相同,从而保证建立的坐标系相同。
进一步地,步骤S2中,控制无人机进行正视平面角度的拍摄,即XY平面角度的拍摄,以及俯视平面角度的拍摄,即ZX平面角度的拍摄。
进一步地,步骤S4中,根据所述当前正视平面角度图像和当前俯视平面角度图像建立坐标系,确定所述均压环上关键点的当前位置坐标,包括:
在所述当前正视平面角度图像上建立XY坐标系,在所述当前俯视平面角度图像上建立ZX坐标系;将所述XY坐标系和所述ZX坐标系进行合并,形成XYZ坐标系;在所述XYZ坐标系下确定所述关键点的当前X轴坐标、当前Y轴坐标和当前Z轴坐标。
进一步地,步骤S5中,所述关键点初始位置坐标包括初始X轴坐标、初始Y轴坐标和初始Z轴坐标;
将所述均压环上关键点的当前位置坐标与预先存储的关键点初始位置坐标进行比较,根据比较结果进行均压环的倾斜故障识别,包括:
将所述关键点的当前X轴坐标、当前Y轴坐标和当前Z轴坐标分别与所述初始X轴坐标、初始Y轴坐标和初始Z轴坐标进行比较,根据比较结果确定关键点的偏移方向和偏移量。
具体地,如果关键点的当前X轴坐标大于初始X轴坐标,则关键点向X轴的正方向偏移,反之,如果关键点的当前X轴坐标小于初始X轴坐标,则关键点向X轴的反方向偏移,当前X轴坐标和初始X轴坐标的差值即为关键点在X轴方向上的偏移量;如果关键点的当前Y轴坐标大于初始Y轴坐标,则关键点向Y轴的正方向偏移,反之,如果关键点的当前Y轴坐标小于初始Y轴坐标,则关键点向Y轴的反方向偏移,当前Y轴坐标和初始Y轴坐标的差值即为关键点在Y轴方向上的偏移量;如果关键点的当前Z轴坐标大于初始Z轴坐标,则关键点向Z轴的正方向偏移,反之,如果关键点的当前Z轴坐标小于初始Z轴坐标,则关键点向Z轴的反方向偏移,当前Z轴坐标和初始Z轴坐标的差值即为关键点在Z轴方向上的偏移量。获得关键点在X轴方向、Y轴方向和Z轴方向的偏移方向和偏移量,即可获得均压环的倾斜情况,为了保证识别的准确性,可以根据多个关键点偏移情况进行综合判定。
其中,假设关键点在X轴方向上的偏移量X
另外,以各坐标轴的初始坐标为起点指向各坐标轴的关键点坐标为终点建立各坐 标轴的偏移向量,则关键点在X轴方向上的偏移向量为
本实施例提供的基于关键点检测的均压环倾斜故障识别方法,至少包括如下有益效果:
(1)通过无人机采集图像识别均压环的倾斜故障代替人工作业,提高识别的准确性,避免人工作业带来的安全问题;
(2)通过关键点识别模型进行均压环的关键点识别,并通过关键点的位置获得均压环的偏移量和偏移方向,准确性更高,解决现有技术中的误判问题,识别效率高,对于微小倾斜偏移也能够识别,识别精度高。
实施例二
参考图2,本实施例提供一种基于关键点检测的均压环倾斜故障识别装置,包括:
无人机控制模块201,用于获取预先存储的无人机初始位置信息,控制无人机飞行至无人机初始位置;
图像采集控制模块202,用于控制无人机对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得当前正视平面角度图像和当前俯视平面角度图像;
关键点识别模块203,用于将所述当前正视平面角度图像和当前俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述当前正视平面角度图像和当前俯视平面角度图像上均压环的关键点;
坐标确定模块204,用于根据所述当前正视平面角度图像和当前俯视平面角度图像建立坐标系,确定所述均压环上关键点的当前位置坐标;
倾斜故障识别模块205,用于将所述均压环上关键点的当前位置坐标与预先存储的关键点初始位置坐标进行比较,根据比较结果进行均压环的倾斜故障识别。
进一步地,还包括模型构建模块206,用于构建神经网络模型;将均压环样本图像进行关键点标记,根据标记后的均压环样本图像对所述神经网络模型进行训练直到模型收敛,获得所述关键点识别模型。
进一步地,还包括初始控制模块207,用于控制无人机对均压环进行初始拍摄,对均压环进行正视平面角度和俯视平面角度的图像采集,分别获得初始正视平面角度图像和初始俯视平面角度图像,将无人机的当前位置信息作为初始位置信息并存储;将所述初始正视平面角度图像和初始俯视平面角度图像输入至预先训练获得的关键点识别模型,识别所述初始正视平面角度图像和初始俯视平面角度图像上均压环的关键点;根据所述初始正视平面角度图像和初始俯视平面角度图像建立坐标系,确定所述均压环上的关键点初始位置坐标;将所述关键点初始位置坐标进行存储。
进一步地,坐标确定模块204还用于在所述当前正视平面角度图像上建立XY坐标系;在所述当前俯视平面角度图像上建立ZX坐标系;将所述XY坐标系和所述ZX坐标系进行合并,形成XYZ坐标系;在所述XYZ坐标系下确定所述关键点的当前X轴坐标、当前Y轴坐标和当前Z轴坐标。
进一步地,所述关键点初始位置坐标包括初始X轴坐标、初始Y轴坐标和初始Z轴坐标;
倾斜故障识别模块205还用于将所述关键点的当前X轴坐标、当前Y轴坐标和当前Z轴坐标分别与所述初始X轴坐标、初始Y轴坐标和初始Z轴坐标进行比较,根据比较结果确定关键点的偏移方向和偏移量;具体地,关键点的当前X轴坐标大于初始X轴坐标,则确定关键点向X轴的正方向偏移;关键点的当前X轴坐标小于初始X轴坐标,则确定关键点向X轴的反方向偏移;当前X轴坐标和初始X轴坐标的差值确定为关键点在X轴方向上的偏移量;关键点的当前Y轴坐标大于初始Y轴坐标,则确定关键点向Y轴的正方向偏移;关键点的当前Y轴坐标小于初始Y轴坐标,则确定关键点向Y轴的反方向偏移;当前Y轴坐标和初始Y轴坐标的差值确定为关键点在Y轴方向上的偏移量;关键点的当前Z轴坐标大于初始Z轴坐标,则确定关键点向Z轴的正方向偏移;关键点的当前Z轴坐标小于初始Z轴坐标,则确定关键点向Z轴的反方向偏移;当前Z轴坐标和初始Z轴坐标的差值确定为关键点在Z轴方向上的偏移量。
进一步地,所述关键点的位置包括位于均压环上正东、正西、正南、正北、东南、西南、东北、西北方位中的至少一种。
本实施例提供的基于关键点检测的均压环倾斜故障识别方法,至少包括如下有益效果:
(1)通过无人机采集图像识别均压环的倾斜故障代替人工作业,提高识别的准确性,避免人工作业带来的安全问题;
(2)通过关键点识别模型进行均压环的关键点识别,并通过关键点的位置获得均压环的偏移量和偏移方向,准确性更高,解决现有技术中的误判问题,识别效率高,对于微小倾斜偏移也能够识别,识别精度高。
本实施例还提供一种电子设备,包括处理器和存储器,所述存储器存储有多条指令,所述处理器用于读取所述指令并执行如实施例一所述的方法。
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种基于关键点检测的均压环倾斜故障识别方法及装置
- 一种基于关键点检测的均压环倾斜故障识别方法及装置