基于数据驱动的隧道掘进机刀盘启动扭矩计算方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及隧道掘进装备施工的技术领域,尤其涉及一种基于数据驱动的隧道掘进机刀盘启动扭矩计算方法,用于计算隧道掘进机刀盘启动扭矩。
背景技术
隧道掘进机刀盘启动扭矩是判断设备是否带载启动、发生启动异常的关键指标。公开号为CN111060243A的一种盾构滚刀扭矩的自动检测装置及检测方法,介绍了在试验台上通过使用扭矩测量仪检测单把滚刀的启动扭矩。在施工过程中,整个刀盘的启动扭矩测试尚未有相应的方法,现场往往是根据单把滚刀在试验台的启动扭矩进行估算。
发明内容
针对现有隧道掘进机的刀盘启动扭矩难以准确估算的技术问题,本发明提出一种基于数据驱动的隧道掘进机刀盘启动扭矩计算方法,依托隧道掘进机推进过程的实时数据实现刀盘启动扭矩的计算。
为了达到上述目的,本发明的技术方案是这样实现的:
一种基于数据驱动的隧道掘进机刀盘启动扭矩计算方法,其步骤如下:
步骤一:按照设定频率采集当前掘进循环隧道掘进机推进过程的实时数据,实时数据包含刀盘扭矩、推进速度和刀盘转速;
步骤二:提取当前掘进循环从刀盘启动至推进速度第一个大于0的点所在位置的数据段;
步骤三:剔除刀盘转速未达到恒定值之间的数据,剩余的即是目标数据段Ttarget;
步骤四:对目标数据段Ttarget的刀盘扭矩取均值,即为刀盘启动扭矩。基于实时获取的设备运行数据,根据设计的算法自动计算刀盘启动扭矩。
所述步骤二中用于判断刀盘启动至推进速度第一个大于0的点所在位置的方法为阈值判定法。
所述阈值判定法为:寻找刀盘转速n>0的第一个点为起始点P
所述步骤三中剔除刀盘转速未达到恒定值之间的数据采用的方法为自适应阈值法。
所述自适应阈值法为:
S31:寻找起始点P
S32:寻找刀盘转速n与刀盘转速最大值之差n
步骤S33:中间点P
所述步骤四中刀盘启动扭矩Tf的计算方式为:
其中,i代表目标数据段Ttarget第一个数据所在的位置,k代表目标数据段Ttarget的总长度;T
本发明的有益效果:本发明可以实现隧道掘进机刀盘启动扭矩的自动化计算,可适用于盾构机、TBM或双护盾TBM等,解决了现有技术只能通过试验台测试单把滚刀扭矩的启动扭矩从而预估整个刀盘启动扭矩,且只能对整个刀盘启动扭矩进行估算导致结果差异的问题,同时还可满足在每个掘进循环均可对刀盘启动扭矩进行计算的需求,根据刀盘启动扭矩的变化判断刀盘带载启动程度是否发生启动异常。本发明更加直接地以数据特征来判断刀盘启动扭矩,无需新增传感器或安装测试试验台,计算简单,同时可监控设备在不同的服役期限刀盘启动扭矩的变化,用于辅助司机评估刀盘启动扭矩是否异常及刀盘带载启动的程度,如用于盾构机或TBM时,可辅助判断在泥岩等黏性地层刀盘被渣料凝结程度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
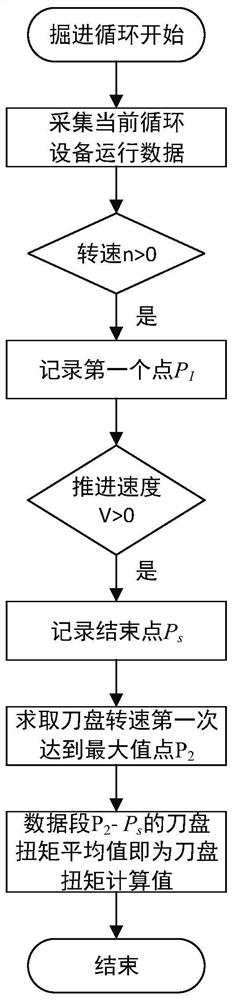
图1为本发明的流程示意图。
图2为本发明某一个掘进循环的设备数据的曲线图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,一种基于数据驱动的隧道掘进机刀盘启动扭矩计算方法,其特征在于,其步骤如下:
步骤一:按照设定频率采集当前掘进循环隧道掘进机推进过程的实时数据,实时数据包含刀盘扭矩、推进速度和刀盘转速。
实时数据包含但不限于刀盘扭矩T、推进速度V、刀盘转速n。选择其他参数作为判定条件,如推进油缸位移、推进压力或新增其他传感器等。
步骤二:提取当前掘进循环从刀盘启动至推进速度第一个大于0的点所在位置的数据段。
所述步骤二中用于判断刀盘启动至推进速度第一个大于0的点所在位置的方法为阈值判定法。所述阈值判定法为:寻找刀盘转速n>0的第一个点为起始点P
步骤三:剔除刀盘转速未达到恒定值之间的数据,剩余的即是目标数据段Ttarget。
所述步骤三中剔除刀盘转速未达到恒定值之间的数据采用的方法为自适应阈值法。所述自适应阈值法为:
S31:寻找起始点P
S32:寻找刀盘转速n与刀盘转速最大值之差n
步骤S33:中间点P
步骤四:对目标数据段Ttarget的刀盘扭矩取均值,即为刀盘启动扭矩。
对数据段P
其中,i代表目标数据段Ttarget第一个数据所在的位置,k代表目标数据段Ttarget的总长度;T
如图2所示,某一个掘进循环的设备数据,实线线条为刀盘扭矩T,含圆圈线为推进速度V,含星形线为刀盘转速n。两条虚线之间的区域是根据本发明的方法找到的用于计算刀盘启动扭矩的目标数据段Ttarget。其中,阈值δ选取的是判断转速是否达到最大转速的临界点,即认为大于(最大转速-δ)的刀盘转速已达到刀盘转速的稳定区间;k代表目标数据段Ttarget的总长度,用于求取刀盘扭矩的平均值;目标数据段Ttarget第一个数据所在的位置i即是判定可认为当前刀盘扭矩为刀盘启动扭矩的起始点。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于数据驱动的隧道掘进机刀盘启动扭矩计算方法
- 基于CSM模型的隧道掘进机刀盘有效推力和扭矩计算方法