一种基于线性序贯滤波的相控阵雷达目标跟踪方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明属于相控阵雷达目标跟踪领域,特别涉及利用多普勒量测信息的目标跟踪系统及方法。
背景技术
在雷达目标跟踪中,目标的状态方程通常是建立在直角坐标系下的,而量测信息一般是在极坐标系或球坐标系下获得,目标的位置量测与运动状态之间呈非线性关系,因此,雷达目标跟踪实质为非线性滤波的问题。解决该非线性滤波的典型方法包括扩展卡尔曼滤波算法(Extend Kalman Filter,EKF)、无迹卡尔曼滤波器(Unscented KalmanFilter,UKF)、量测转换方法(Converted Measurements Kalman Filter)等。其中,EKF通过泰勒分解将非线性问题转化为线性问题,然后套用卡尔曼滤波的方法求解,然而,在强非线性下,Taylor展开式中被忽略的高阶项将带来误差,导致EKF算法滤波发散;而UKF使用无迹变换(Unscented Transform,UT)处理均值和协方差的非线性传递,通过有限的参数来近似随机量的统计特性,从而获得后验概率的二阶统计量,虽然该方法能捕获量测转换偏差,但是却无法消除它,导致基于UT的卡尔曼滤波估计结果依旧不够理想。除了以上两种方法外,基于笛卡尔坐标系和极坐标系之间的量测转换也是一种有效的方法,但是直接进行量测转换的结果是有偏的,为消除偏差,发展出了一系列改进的量测转换方法:其中去偏量测转换方法(DCM)(D.Lerro and Y.Bar-Shalom,"Tracking with debiased consistentconverted measurements versus EKF,"in IEEE Transactions on Aerospace andElectronic Systems,vol.29,no.3,pp.1015-1022,July 1993.)利用相减去偏原理消除量测转换偏差;无偏量测转换方法(UCM)(Mo Longbin,Song Xiaoquan,Zhou Yiyu,Sun ZhongKang and Y.Bar-Shalom,"Unbiased converted measurements for tracking,"in IEEETransactions on Aerospace and Electronic Systems,vol.34,no.3,pp.1023-1027,July1998.)利用相乘去偏原理对量测转换进行去偏处理;在此基础上,修正无偏量测转换方法(MUCM)(Z.Duan,C.Han,and X.R.Li,“Comments on”unbiased convertedmeasurements for tracking,IEEE Trans.On Aerospace and Electronic Systems,vol.40,no.4,pp.1374-1377,Oct.2004.),在保证量测转换误差无偏的条件下消除了UCM存在的兼容性问题;以上几种量测转换方法基于量测值计算转换误差的统计特性,使得转换量测的误差协方差与量测相关,基于预测值估计误差统计特性的去相关无偏量测转换方法(DUCM)(Steven V.Bordonaro,Peter Willett,Yaakov Bar-Shalom,"Tracking withconverted position and Doppler measurements,"Proc.SPIE 8137,Signal and DataProcessing of Small Targets 2011.)提出基于预测值计算转换误差的统计特性。
在非线性位置量测信息的基础上,多普勒量测的引入可进一步提高目标跟踪性能,但却增大了量测与状态向量之间的非线性程度。为了解决这种非线性关系,各种各样的滤波方法被不断提出,包括以下几种:序贯滤波(Sequential filtering,SQ)(X.R.LiZ.S.Duan and C.Z.Han.Sequential nonlinear tracking filter with range-ratemeasurements in spherical coordinates.In Proceedings of the 7th InternationalConference on Information Fusion,(4):599–605,6 2004.)将DCM算法推广为可处理多普勒量测,利用多普勒量测信息对基于位置量测信息的滤波结果进行序贯滤波,其中采用二阶扩展卡尔曼滤波实现得到最终的滤波结果,但序贯滤波中的非线性误差会随着滤波进行而迭代累积,影响滤波效果;静态融合滤波方法(Statically fused,SF)(T.KirubarajanG.J.Zhou,M.Pelletier and T.F.Quan.Statically fused converted position anddoppler measurement kalman filters.Aerospace and Electronic Systems IEEETransactions on,50(1):300–318,2014.)利用卡尔曼滤波器估计目标位置状态和多普勒伪状态,再基于最小均方误差准则(Least Mean Square Error,LMSE)融合位置和多普勒伪状态,得到最终状态估计结果,但该方法需要针对具体的目标运动状态方程推导相应的多普勒伪状态转移方程,目前仅适用匀速和匀加速运动的目标。带径向速度的无偏量测转换方法(H.Liu,Z.Zhou,L.Yu and C.Lu,"Two unbiased converted measurement Kalmanfiltering algorithms with range rate,"in IET Radar,Sonar&Navigation,vol.12,no.11,pp.1217-1224,11 2018.)则通过构造线性的量测矩阵,使得目标的位置和多普勒量测与运动状态之间呈线性关系,从而进行完全线性的卡尔曼滤波,然而实际中该方法需要较好的角度量测,否则量测矩阵不准确,导致滤波结果发散。
针对以上问题,本发明提出一种基于线性序贯滤波的相控阵雷达目标跟踪方法(DUCMKF-LSQ),其中,利用基于位置量测信息转换获得的目标状态估计结果,提取目标角度估计信息,用于构造线性的径向速度量测矩阵,从而使用径向速度量测对位置量测的滤波结果进行序贯滤波,获得最终的目标状态估计结果。
发明内容
假设k-1时刻目标状态估计为
步骤1:按如下方式进行无偏量测转换。
步骤2:按照下式计算k时刻目标的状态预测。
其中,F(k-1)为k-1时刻的转移矩阵,
预测估计误差协方差表示为:
P
其中,(·)
步骤3:基于位置量测的线性卡尔曼滤波。
K
P
其中,
其中,r
距离的预测值及其方差:
方位角的预测值及其方差:
俯仰角的预测值及其方差:
步骤4:基于径向速度量测的线性序贯卡尔曼滤波。
K
P
其中,
其中,上式中的预测信息可通过式(19)—(22)获得。
最后,根据量测误差大小自适应选择将
当满足式(37)的条件时,选择
发明原理
在基于量测转换的相控阵雷达目标跟踪方法中,引入径向速度量测信息后,往往是将径向速度量测信息作为额外的信息与位置量测信息分开进行处理,首先对位置量测信息进行量测转换。根据球坐标系与笛卡尔坐标系之间的转换关系,可得到:
对上面式子取期望可得:
其中,r(k),θ(k),
由(41)式可见,原始量测转换结果是有偏的,需要进行去偏处理。本发明利用相乘去偏方法得到如下位置无偏量测转换:
将位置无偏量测转换与本就无偏的径向速度量测信息一起构成(1)式并基于此构造如下线性量测方程:
Z
其中,V
从量测矩阵可以看出,此处径向速度量测信息与目标状态呈完全线性的关系,其中的θ和
首先,计算量测转换误差的统计特性,这里基于目标预测信息计算其均值和协方差。基于预测值的无偏量测转换误差均值为:
计算基于预测值的无偏量测转换误差协方差R
其中R
通过上述推导得到基于预测值的无偏量测转换误差统计特性后,按照序贯滤波的步骤,首先对位置量测进行线性卡尔曼滤波,得到位置滤波结果
构造
将B(k)同时左乘在式(43)两侧,得到去除位置和径向速度相关性之后的无偏量测转换如下所示:
其中,H
去除位置和径向速度相关性之后的无偏量测转换很显然为零均值,其协方差如下所示:
将(47)代入上式中,得到下式:
其中,
根据式(51)可见,达到了去相关的目的。如(25)和(26)所示,由推导出的线性序贯滤波方法进行状态更新,得到滤波结果
附图说明
图1为场景1无径向速度量测信息算法与带径向速度信息的算法性能对比;
图2为场景1算法位置RMSE性能对比;
图3为场景1算法速度RMSE性能对比;
图4为场景2无径向速度量测信息算法与带径向速度信息的算法性能对比;
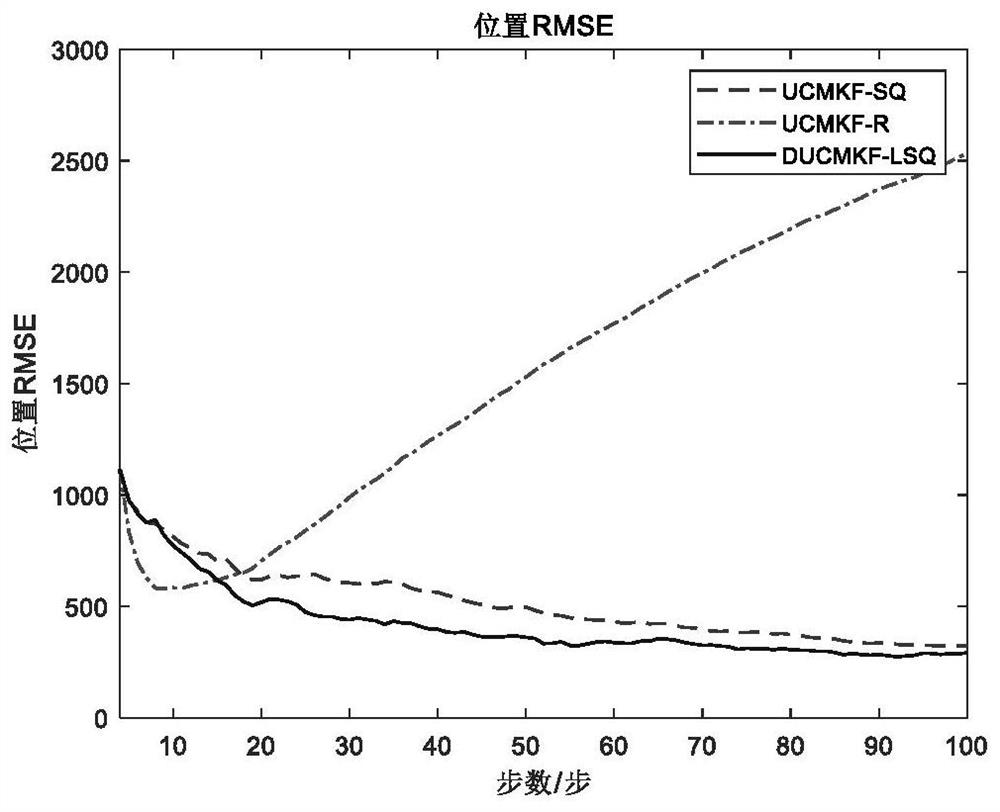
图5为场景2算法位置RMSE性能对比;
图6为场景2算法速度RMSE性能对比;
图7为场景3无径向速度量测信息算法与带径向速度信息的算法性能对比;
图8为场景3算法位置RMSE性能对比;
图9为场景3算法速度RMSE性能对比。
具体实施方式
考虑对目标匀速直线运场景进行跟踪仿真。目标的初始位置坐标为(15km,15km,0km),初始速度为(50m/s,50m/s,70m/s),雷达采样周期为1s,目标的量测值包括径向距离,俯仰角、方位角和径向速度量测。假设各量测噪声为高斯零均值白噪声,其噪声标准差定义为表1所示。过程噪声假定为高斯白噪声,其标准差为q=0.01m/s
表1仿真场景参数
采用本发明提出的DUCMKF-LSQ方法实现目标跟踪,同时为了说明本发明算法的优势,将其与去相关无偏量测转换方法(DUCMKF)、基于无偏量测转换的序贯滤波算法(UCMKF-SQ)、带径向速度的无偏量测转换方法(UCMKF-R)进行性能对比,从位置和速度估计误差均方差RMSE方面来比较算法的跟踪精度。
在三种仿真场景下,DUCMKF算法与DUCMKF-LSQ算法(本文算法)位置RMSE性能对比如图1,4,7所示,可见,在引入径向速度量测信息之后,可有效提高目标跟踪精度,并且在径向速度量测误差相对于距离量测误差较小的时候(场景1和场景3),改善更加明显,在径向速度量测误差相对于距离量测误差较大的时候(场景2),改善不明显;UCMKF-SQ算法、UCMKF-R算法与DUCMKF-LSQ算法的位置和速度RMSE性能对比如图2,3所示,在小噪声(场景1)情况下,通过观察位置和速度RMSE的仿真情况,几种算法均能够很好的收敛于相近位置,其中UCMKF-R算法略差于UCMKF-SQ算法和本发明DUCMKF-LSQ算法;在仿真场景2下,UCMKF-SQ算法、UCMKF-R算法与DUCMKF-LSQ算法的位置和速度RMSE性能对比如图5,6所示,UCMKF-R算法已经发散,而DUCMKF-LSQ算法性能明显优于UCMKF-SQ算法;在仿真场景3下,UCMKF-SQ算法、UCMKF-R算法与DUCMKF-LSQ算法的位置和速度RMSE性能对比如图8,9所示,能得到与仿真场景2相似的结果。可以看出,在各种不同噪声场景的情况下,本发明算法相较其他算法的RMSE更小,具有与目标真实状态更接近的估计结果,本发明算法具有更好的跟踪性能。
本发明在不同大小噪声场景下均能够获得相较于同类算法更高的状态估计精度。综上,本发明所提出的一种基于线性序贯滤波的相控阵雷达目标跟踪方法是一种有效的相控阵雷达目标跟踪算法。
- 一种基于线性序贯滤波的相控阵雷达目标跟踪方法
- 基于序贯贝叶斯滤波的多目标跟踪方法及跟踪系统