一种智能化的采茶机器人
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于机器人技术领域,具体的说是一种智能化的采茶机器人。
背景技术
我国是农业大国,随着国民经济和科学技术的提高,特别是机械自动化技术、控制技术、人工智能的迅速发展与提高,促使了农业生产实现了机械化,自动化。中国茶叶驰名中外,特别是在皖南山区,茶叶带来经济效益更是在每个乡村家庭收入中扮演着举足轻重的地位。
传统的人工采茶,耗时费力,甚至在采一些悬崖峭壁上的野茶时,会十分危险;为此,本发明提供一种智能化的采茶机器人。
发明内容
为了弥补现有技术的不足,解决传统的人工采茶,耗时费力,甚至在采一些悬崖峭壁上的野茶时,会十分危险的问题,本发明提出的一种智能化的采茶机器人。
本发明解决其技术问题所采用的技术方案是:本发明所述的一种智能化的采茶机器人,包括采摘机构、主机架、动态视觉识别系统、多环境运动装置和茶叶收集装置;所述采摘机构设置在主机架的顶部;所述动态视觉识别系统设置在采摘机构上;所述多环境运动装置设置在主机架的底部;所述茶叶收集设置在主机架的侧壁;所述主机架内部设置有动力装置;可以高效的完成对采摘茶叶的收集,能够很好的完成对于茶叶的采摘工作,解放了人们的双手,实现了自动化采茶,大大提高了茶叶采集的效率,减少了茶叶采集消耗的人力物力,降低了茶叶生产的成本,提高了稳定性和机动性,从而可以代替茶农前去危险的地方采茶,给茶农们带来了极大的便利和经济效益。
进一步,所述采摘机构包括采茶机械臂和采摘手;所述采茶机械臂前端与采摘手连接;所述采茶机械臂固定在主机架上;所述动态视觉识别系统固定在采茶机械臂上;采摘时,叶子用被采摘手的拇指和食指抓住,在旋转的时候一个接一个地拉着,由于切割表面损伤最小,因此可以保持最高的叶片质量;采摘动作由控制系统控制,机器人内部设置有芯片,用来学习采摘动作;其工作过程为:假设影响采摘运动的叶片,叶柄和枝条的情况反映在枝条的刚度中,并根据这种刚度产生采摘运动,树枝的刚度被定义为当夹持叶片被轻微拉起时,单位长度从树枝接收到的力;枝条的刚度越大,越难拔叶,拔叶运动的时间长度和位移越长;机器人内部的芯片中存储有适合于小刚度和大刚度的采摘运动。
进一步,所述动态视觉识别系统为CDD视觉系统;所述动态视觉识别系统包括固定在所述采茶机械臂末端的初步定位视觉识别摄像头与固定在所述采摘手上的精确定位视觉识别摄像头;能够自动扫描识别茶叶的品质从而协助采摘手进行采摘。
进一步,所述茶叶收集装置包括两个收集桶;所述收集桶固接在主机架的侧壁上,且位于采摘手下方;所述收集桶内装有空气吸盘和压缩空气流动装置;收集桶用来存储采摘下来的茶叶,空气吸盘能够吸附采摘的茶叶,防止茶叶丢失。
进一步,所述多环境运动装置包括车桥、轮毂和履带,所述车桥设置在主机架上;所述轮毂设置在车桥的两端;所述履带套设在轮毂的外侧;能够实现全方位移动,履带上方安装有汽车的减震缓压装置,可适应多种使用环境。
进一步,所述收集桶通过固定机构设置在主机架的两侧;所述固定机构包括插孔和插杆;所述插孔开设在主机架的侧壁;所述插杆固接在收集桶的侧壁;所述插杆的侧壁镶嵌有磁铁;所述插孔的内壁开设有一号孔;所述一号孔内通过弹簧连接有一号杆,且一号杆与一号孔滑动连接;所述一号杆靠近插杆的一端固接有铁片;安装收集桶时,将插杆插入插孔,使得插杆顶部的磁铁与一号杆端部的铁片相互吸引,使得一号杆吸附在插杆的侧壁,插杆也就固定在主机架的侧壁;安装方便,同时也便于将收集桶取下,并且倒出茶叶。
本发明的有益效果如下:
1.本发明所述的一种智能化的采茶机器人,使用动态视觉识别技术配合采摘机械臂,能自动扫描茶叶品质,且能模拟人工采摘,并优于人工采茶,且采茶机器人左右各有一采摘机械臂,能够同时对两侧茶树采摘,采茶效率高。
2.本发明所述的一种智能化的采茶机器人,通过设置多环境运动装置,实现全方位移动,可适应多种使用环境的茶园,且可以代替人工前去危险的地方采摘。
附图说明
下面结合附图对本发明作进一步说明。
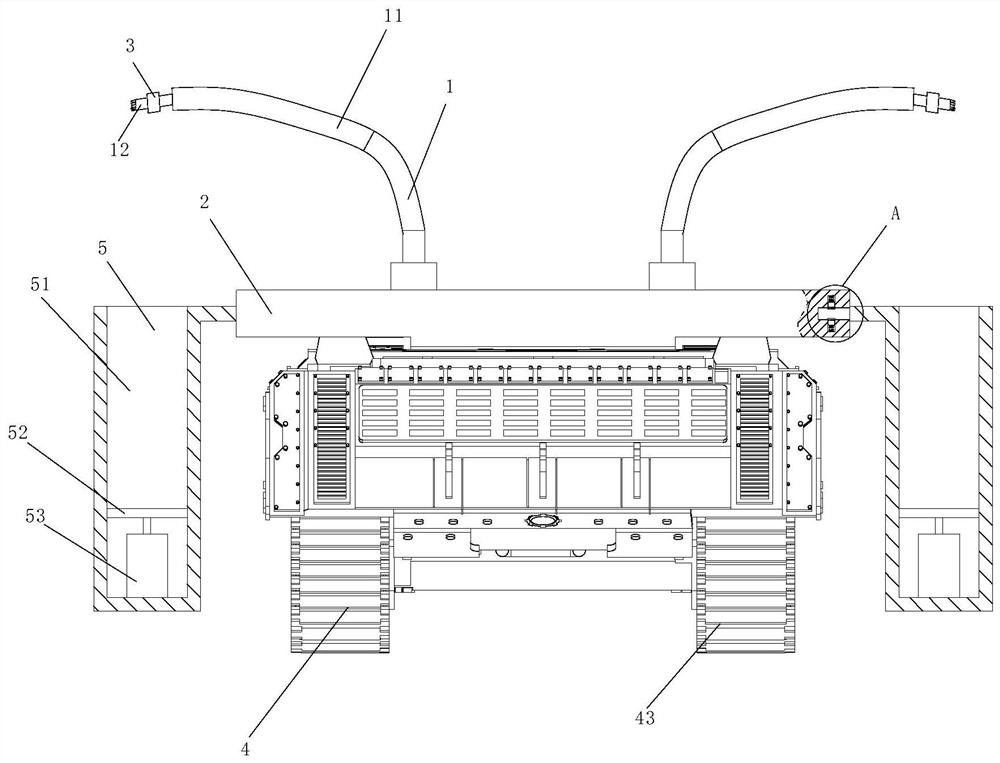
图1为本发明的整体结构示意图;
图2为图1中A处局部放大图;
图3为本发明中车桥和轮毂的立体图;
图4为本发明中智能化采茶机器人简略工作流程图;
图5为本发明中智能化采茶机器人对茶苗的图像识别流程图;
图中:1、采摘机构;11、采茶机械臂;12、采摘手;2、主机架;3、动态视觉识别系统;4、多环境运动装置;41、车桥;42、轮毂;43、履带;5、茶叶收集装置;51、收集桶;52、空气吸盘;53、压缩空气流动装置;6、固定机构;61、插孔;62、插杆;63、磁铁;64、一号孔;65、弹簧;66、一号杆;67、铁片。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图5所示,本发明所述的一种智能化的采茶机器人,包括采摘机构1、主机架2、动态视觉识别系统3、多环境运动装置4和茶叶收集装置5;所述采摘机构1设置在主机架2的顶部;所述动态视觉识别系统3设置在采摘机构1上;所述多环境运动装置4设置在主机架2的底部;所述茶叶收集设置在主机架2的侧壁;所述主机架2内部设置有动力装置;动力装置包括太阳能蓄电池、空气压缩机,为采摘机构1、动态视觉识别系统3、多环境运动装置4提供电能,为茶叶收集提供压缩空气;可以高效的完成对采摘茶叶的收集,能够很好的完成对于茶叶的采摘工作,解放了人们的双手,实现了自动化采茶,大大提高了茶叶采集的效率,减少了茶叶采集消耗的人力物力,降低了茶叶生产的成本,提高了稳定性和机动性,从而可以代替茶农前去危险的地方采茶,给茶农们带来了极大的便利和经济效益。
为了进一步实现本发明的内容,所述采摘机构1包括采茶机械臂11和采摘手12;所述采茶机械臂11前端与采摘手12连接;所述采茶机械臂11固定在主机架2上;所述动态视觉识别系统3固定在采茶机械臂11上;采摘时,叶子用被采摘手12的拇指和食指抓住,在旋转的时候一个接一个地拉着,由于切割表面损伤最小,因此可以保持最高的叶片质量;采摘动作由控制系统控制,机器人内部设置有芯片,用来学习采摘动作;其工作过程为:假设影响采摘运动的叶片,叶柄和枝条的情况反映在枝条的刚度中,并根据这种刚度产生采摘运动,树枝的刚度被定义为当夹持叶片被轻微拉起时,单位长度从树枝接收到的力;枝条的刚度越大,越难拔叶,拔叶运动的时间长度和位移越长;机器人内部的芯片中存储有适合于小刚度和大刚度的采摘运动;接下来,用概率运动原语学习了低刚度和高刚度情况下的教学运动;然后,产生一个运动,时间和位移对应的情况,其中分支的刚度是中间的,运动没有教;在低刚度和高刚度的情况下,运动量是通过概率结合学习运动来确定的;组成比取决于分支的刚度;在常规的组合中,一个运动被激活的程度被调整,由于运动的时间步骤都是对齐和组合的,因此不考虑具有高度不同时间长度的运动的情况;组成比由激活函数表示;运动的时间长度,组合后,由教学数据中运动的时间长度与分支的刚度之间的关系确定;产生了学习运动的中间位移和时间长度;对于刚度是中间的;而运动没有被教授的情况下,仍然有可能产生适合情况的运动和时间长度,同时复制人类的采摘运动;该方法产生的运动可以采摘和收获优质茶叶。
为了进一步实现本发明的内容,所述动态视觉识别系统3为CDD视觉系统;所述动态视觉识别系统3包括固定在所述采茶机械臂11末端的初步定位视觉识别摄像头与固定在所述采摘手12上的精确定位视觉识别摄像头;能够自动扫描识别茶叶的品质从而协助采摘手12进行采摘,利用图像增强技术(这里使用直方图均衡化)对茶叶的原始图像进行处理,突出茶叶图像的边缘信息、轮廓信息和对比度等图像特征;将茶叶的增强原图像从RGB颜色模型转换为合适的颜色模型,选择有利于茶芽识别的颜色分量;最后,利用改进的K均值聚类算法对茶叶图像进行分割;为了识别优质茶叶的嫩芽,准确、快速地确定采摘点,使用了一种用改进的YOLO-v3深卷积神经网络算法识别嫩芽采摘点的方法;该方法实现了端到端目标检测和对优质茶笋不同姿态的识别,兼顾了效率和精度;首先,为了预测嫩茶芽的类别和位置,采用图像金字塔结构获得不同尺度的茶芽特征图;在下采样部分加入剩余的网络块结构,最后用1x1的卷积运算代替完全连接的部分,保证结果的准确识别,简化网络结构;采用K-means方法对目标框的尺寸进行聚类;最后,构建了优质茶笋采摘点的图像数据集,验证集下的训练模型准确率达到90%以上,远远高于研究方法的检测准确率。
为了进一步实现本发明的内容,所述茶叶收集装置5包括两个收集桶51;所述收集桶51固接在主机架2的侧壁上,且位于采摘手12下方;所述收集桶51内装有空气吸盘52和压缩空气流动装置53;收集桶51用来存储采摘下来的茶叶,空气吸盘52能够吸附采摘的茶叶,防止茶叶丢失。
为了进一步实现本发明的内容,所述多环境运动装置4包括车桥41、轮毂42和履带43,所述车桥41设置在主机架2上;所述轮毂42设置在车桥41的两端;所述履带43套设在轮毂42的外侧;能够实现全方位移动,履带43上方安装有汽车的减震缓压装置,可适应多种使用环境。
为了进一步实现本发明的内容,所述收集桶51通过固定机构6设置在主机架2的两侧;所述固定机构6包括插孔61和插杆62;所述插孔61开设在主机架2的侧壁;所述插杆62固接在收集桶51的侧壁;所述插杆62的侧壁镶嵌有磁铁63;所述插孔61的内壁开设有一号孔64;所述一号孔64内通过弹簧65连接有一号杆66,且一号杆66与一号孔64滑动连接;所述一号杆66靠近插杆62的一端固接有铁片67;安装收集桶51时,将插杆62插入插孔61,使得插杆62顶部的磁铁63与一号杆66端部的铁片67相互吸引,使得一号杆66吸附在插杆62的侧壁,插杆62也就固定在主机架2的侧壁;安装方便,同时也便于将收集桶51取下,并且倒出茶叶。
工作原理:采摘时,叶子用被采摘手12的拇指和食指抓住,在旋转的时候一个接一个地拉着,由于切割表面损伤最小,因此可以保持最高的叶片质量;采摘动作由控制系统控制,机器人内部设置有芯片,用来学习采摘动作;其工作过程为:假设影响采摘运动的叶片,叶柄和枝条的情况反映在枝条的刚度中,并根据这种刚度产生采摘运动,树枝的刚度被定义为当夹持叶片被轻微拉起时,单位长度从树枝接收到的力;枝条的刚度越大,越难拔叶,拔叶运动的时间长度和位移越长;机器人内部的芯片中存储有适合于小刚度和大刚度的采摘运动;接下来,用概率运动原语学习了低刚度和高刚度情况下的教学运动;然后,产生一个运动,时间和位移对应的情况,其中分支的刚度是中间的,运动没有教;在低刚度和高刚度的情况下,运动量是通过概率结合学习运动来确定的;组成比取决于分支的刚度;在常规的组合中,一个运动被激活的程度被调整,由于运动的时间步骤都是对齐和组合的,因此不考虑具有高度不同时间长度的运动的情况;组成比由激活函数表示;运动的时间长度,组合后,由教学数据中运动的时间长度与分支的刚度之间的关系确定;产生了学习运动的中间位移和时间长度;对于刚度是中间的;而运动没有被教授的情况下,仍然有可能产生适合情况的运动和时间长度,同时复制人类的采摘运动;该方法产生的运动可以采摘和收获优质茶叶;能够自动扫描识别茶叶的品质从而协助采摘手12进行采摘,利用图像增强技术(这里使用直方图均衡化)对茶叶的原始图像进行处理,突出茶叶图像的边缘信息、轮廓信息和对比度等图像特征;将茶叶的增强原图像从RGB颜色模型转换为合适的颜色模型,选择有利于茶芽识别的颜色分量;最后,利用改进的K均值聚类算法对茶叶图像进行分割;为了识别优质茶叶的嫩芽,准确、快速地确定采摘点,使用了一种用改进的YOLO-v3深卷积神经网络算法识别嫩芽采摘点的方法;该方法实现了端到端目标检测和对优质茶笋不同姿态的识别,兼顾了效率和精度;首先,为了预测嫩茶芽的类别和位置,采用图像金字塔结构获得不同尺度的茶芽特征图;在下采样部分加入剩余的网络块结构,最后用1x1的卷积运算代替完全连接的部分,保证结果的准确识别,简化网络结构;采用K-means方法对目标框的尺寸进行聚类;最后,构建了优质茶笋采摘点的图像数据集,验证集下的训练模型准确率达到90%以上,远远高于研究方法的检测准确率;收集桶51用来存储采摘下来的茶叶,空气吸盘52能够吸附采摘的茶叶,防止茶叶丢失;本机器人能够实现全方位移动,履带43上方安装有汽车的减震缓压装置,可适应多种使用环境;安装收集桶51时,将插杆62插入插孔61,使得插杆62顶部的磁铁63与一号杆66端部的铁片67相互吸引,使得一号杆66吸附在插杆62的侧壁,插杆62也就固定在主机架2的侧壁;安装方便,同时也便于将收集桶51取下,并且倒出茶叶。
上述前、后、左、右、上、下均以说明书附图中的图1为基准,按照人物观察视角为标准,装置面对观察者的一面定义为前,观察者左侧定义为左,依次类推。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种自主移动智能化采茶机器人
- 一种智能化的采茶机器人