基于CycleGAN和条件分布自适应的目标检测方法
文献发布时间:2023-06-19 11:39:06
技术领域
本申请属于深度学习领域,具体涉及基于CycleGAN和条件分布自适应的目标检测方法。
背景技术
目标检测是计算机视觉中的基础又具挑战的任务。最先进的目标检测方法通常基于训练数据和测试数据都来自相同的分布。目前,目标检测中性能最佳的检测器是全监督检测器(FSDs),但通常需要大量的带实例级注释的图像中学习。实例级注释由标签和边界框组成。但在很多图像领域中,构建具有实例级注释的大型数据集通常是困难和不现实的(缺乏图像来源、版权和注释成本等障碍)。使用已有数据辅助训练模型能很好地缓解数据稀缺问题,但光照、姿态和图像质量等影响,会造成两个域之间存在降低性能的变化或偏移。因此,如何高效使用已有数据的信息称为一个关键问题。
目前,深度域自适应在图像分类和语义分割上获得了很好的效果,也有望能提高目标检测的性能。深度域自适应目标检测旨在利用源域丰富的数据和目标域贫乏的数据来学习一个鲁棒的目标检测器,学习过程依赖于深度域自适应目标检测模型或原理,源域和目标域之间的分布不同或完全不同,经过训练的目标检测器有望在目标域表现出色。因此,如何减少域偏移并构建鲁棒的目标检测器对目标检测任务非常重要。
发明内容
为了克服现有技术的不足,本申请提供一种基于CycleGAN和条件分布自适应的目标检测方法,通过Fsater RCNN网络进行目标检测,得到基于CycleGAN和条件分布自适应的目标检测模型。
为实现上述目的,本申请所采取的技术方案为:
一种基于CycleGAN和条件分布自适应的目标检测方法,包括以下步骤:
步骤S1、使用CycleGAN将源域数据集进行迁移,得到更逼近目标域分布的中间数据集,预处理后对Faster RCNN网络进行训练;
步骤S2、将目标域数据集进行预处理;
步骤S3、将预处理后的中间数据集和目标域图像输入到特征提取器中,域鉴别器根据条件分布判断特征属于中间数据集或目标域,进行对抗训练后得到最大公有特征;
步骤S4、检测器根据公有特征对目标域图像分类和定位,最终得到基于CycleGAN和条件分布自适应的目标检测模型。
进一步,所述步骤S1中,通过使用CycleGAN对源域数据集处理后的得到贴近目标域的中间数据集,并训练Faster RCNN,过程如下:
S11.将源域数据X
S12.将源域中的数据集X
S13.对中间数据集X
S14.使用X
再进一步,所述步骤S2的过程如下:
将目标域数据集Xt={u
更进一步,所述步骤S3中,提取中间数据集X
S31.将数据集X
S32.特征提取器对图像进行卷积操作,得到图像的特征图f,尺寸为H×W×C,其中H、W、C分别是图像的高度、宽度和通道数;
S33.将特征图输入域鉴别器D中,域分类器根据由特征图判断图像属于数据集X
S34.根据域分类结果调整特征提取器,直至提取出最大公共特征f
其中代表源域中样本数量,n
S35.将特征f
本发明的有益效果为:利用CycleGAN对源域图像进行处理,得到更接近于目标域的中间数据集,将中间数据集对Fast RCNN训练,然后提取中间数据集和目标域数据的最大公有特征,并将目标域的此特征放入检测器,充分拉近源域和目标域的数据分布,得到最大公有特征,显著提高深度域自适应中目标检测的准确性。
附图说明
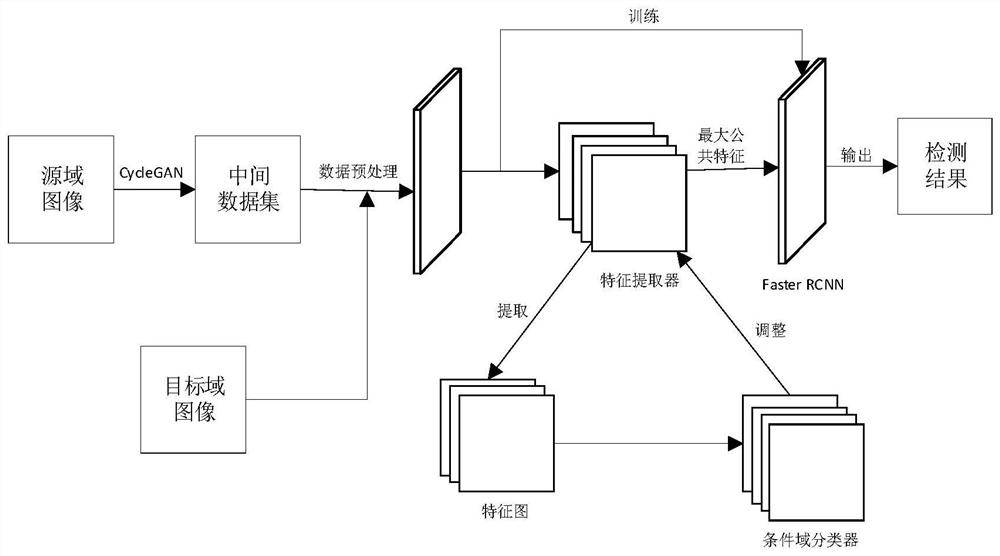
图1为本申请的基于CycleGAN和条件分布自适应的目标检测算法的流程图;
图2为本申请CycleGAN处理示意图;
图3为本申请CycleGAN循环一致性处理示意图;
图4为本申请对图像进行预处理示意图;
图5为使用特征提取器提取图像特征后,域分类根据条件分布区分域后,调整特征提取器获得最大公共特征的流程图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是在于限制本申请。
参照图1~图5,一种基于CycleGAN和条件分布自适应的目标检测方法,该方法利用了CycleGAN将源域图像转换为和目标域更相似的中间数据集,再利用特征提取器和域分类器对抗训练,提取最大公共特征,实现目标域缺标签情况下的准确分类。
具体的,如图1所示,本实例的基于CycleGAN和条件分布自适应的目标检测方法,包括以下步骤:
步骤S1、使用CycleGAN将源域数据集进行迁移,得到更逼近目标域分布的中间数据集,预处理后对Faster RCNN网络进行训练;
步骤S2、将目标域数据集进行预处理;
步骤S3、将预处理后的中间数据集和目标域图像输入到特征提取器中,域鉴别器根据条件分布判断特征属于中间数据集或目标域,进行对抗训练后得到最大公有特征;
步骤S4、检测器根据公有特征对目标域图像分类和定位,最终得到基于CycleGAN和条件分布自适应的目标检测模型,
所述步骤S1中,对源域数据集进行风格迁移方法,其特征在于,利用CycleGAN对源域中的图像进行转换,预处理后训练Faster RCNN模型,过程如下:
S11.将源域数据X
S12.将源域中的数据集X
S13.对中间数据集X
S14.使用X
所述步骤S2的过程如下:
将目标域数据集X
所述步骤S3中,利用特征提取器提取中间域数据集和目标域的最大公共特征,放入域鉴别器进行域判断,优化损失函数提取出最大公共特征,实现目标域的图像定位;过程如下:
S31.将数据集X
S32.特征提取器对图像进行卷积操作,得到图像的特征图f,尺寸为H×W×C,其中H、W、C分别是图像的高度、宽度和通道数;
S33.将特征图输入域鉴别器D中,域分类器根据由特征图判断图像属于数据集X
S34.根据域分类结果调整特征提取器,直至提取出最大公共特征f
其中代表源域中样本数量,n
S35.将特征f
本实施例提供的基于CycleGAN和条件分布自适应的图像目标检测方法,利用CycleGAN对源域图像进行处理,得到更接近于目标域的中间数据集,将中间数据集对FastRCNN训练,然后提取中间数据集和目标域数据的最大公有特征,并将目标域的此特征放入检测器,充分拉近源域和目标域的数据分布,得到最大公有特征,显著提高深度域自适应中目标检测的准确性。
本实施中先将源域图像通过CycleGAN进行迁移,获得更加接近目标域的中间数据集,中间数据集获得源域中的图像级和实例级特征,再利用中间数据集预处理后训练Faster RCNN,获得目标检测模型。将中间数据集和目标域数据集输入CNN特征提取器,提取出图像的特征图,域分类器根据特征图判断特征属于源域或目标域,通过优化函数调整特征提取器,直至提取出两个数据集间最大公共特征,输入训练的模型中进行目标检测。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 基于CycleGAN和条件分布自适应的目标检测方法
- 基于自适应目标区域搜索和博弈的无人机智能车辆目标检测方法和应用