用于辅助通信系统高能效的无人机的三维轨迹优化方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及无人机动力消耗技术领域,具体地说,是涉及用于辅助通信系统高能效的无人机的三维轨迹优化方法。
背景技术
在“后5G”(Beyond 5G)或6G时代,建立并实现“空-天-陆-海”全维度网络架构,是通信领域的研究热点。无人机作为空中载体,有望作为空基网络的载体之一。由于无人机受有限机载能量的束缚,所以提高无人机能量利用效率,是提高无人机辅助通信实际应用可能性的关键技术之一。在此背景下,如何准确评估无人机能量消耗、如何在无人机完成通信任务中最大限度节省能量,是评价此类方法优劣性的重要指标。
目前,在无人机作为动态空中基站的应用场景中,关于无人机辅助通信的能量模型以及三维调度研究尚不充分。
文献“Energy-Efficient UAV Communication With Trajectory Optimization”和文献“Energy Minimization for Wireless Communication With Rotary-Wing UAV”中Y.Zeng等人基于P=FV公式分别推导了一种固定翼无人机和旋翼无人机有效功率计算方法,但是其并不能直接用来估计无人机的原始能量(如燃油、电能)消耗;其二,他们的能量消耗模型是基于无人机做平面运动的假设推导的,不便于推广到三维空间运动。
文献“Optimal 3D-Trajectory Design and Resource Allocation for Solar-Powered UAV Communication Systems”Y.Sun等人将旋翼无人机能量消耗分解成水平面运动做功和垂直方向做功之和,用于估计无人机在三维空间的运动耗能,然而功率并不满足叠加原理,因此此方法的理论可行性不足。
发明内容
本发明的目的在于提供一种用于辅助通信系统高能效的无人机的三维轨迹优化方法,用于规划单个无人机完成一个通信节点的数据收集或传播的三维轨迹,使得可以显著提高无人机辅助通信的效率。
为实现上述目的,本发明采用的技术方案如下:
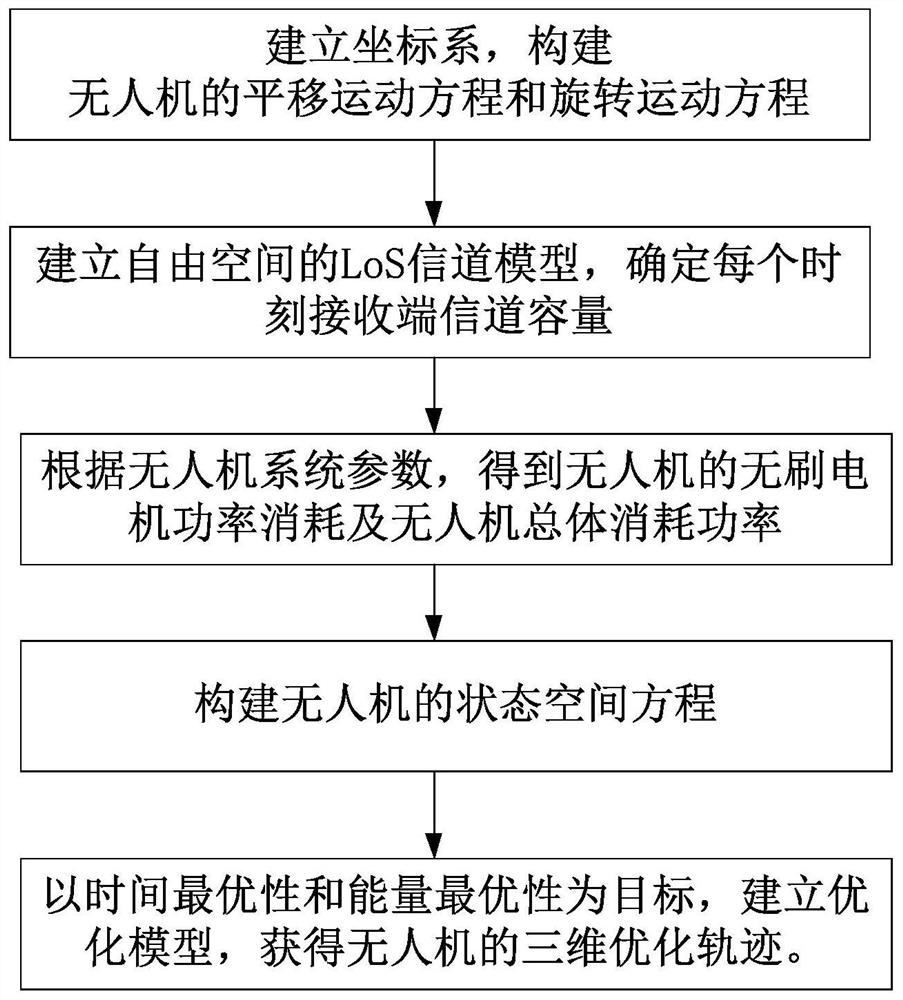
用于辅助通信系统高能效的无人机的三维轨迹优化方法,包括以下步骤:
(1)建立地面坐标系和无人机的机体坐标系,根据已知的十字形旋翼动力学模型,建立无人机的平移运动方程和旋转运动方程;
(2)建立自由空间的LoS信道模型,根据已知的环境噪声、发射功率、以及载波波长,确定每个时刻接收端信道容量;
(3)根据无人机所用电动机性能参数,以及无人机的通信系统额定功率,得到无人机的无刷电机功率消耗及无人机的总体消耗功率;
(4)根据无人机的平移运动方程和旋转运动方程,信道容量方程和功率消耗方程,构建无人机的状态空间方程;
(5)根据状态空间方程,分别以时间最优性和能量最优性为目标,添加无人机安全飞行状态约束、通信任务约束,建立优化模型,获得无人机的三维优化轨迹。
进一步地,在步骤(1)中,所述地面坐标系为以地面O
进一步地,所述无人机的平移运动方程和旋转运动方程:
其中m是无人机机体总质量,g是当地重力加速度,L是四旋翼的悬臂长度;J
进一步地,所述LoS信道模型每个时刻接收端信道容量:
其中,W是通信带宽,P是通信发射端发射功率,σ
进一步地,所述无人机的无刷电机功率消耗:
P
其中
C
从而得到无人机总体消耗功率:
其中,P
进一步地,所述状态空间方程的计算中,
无人机的状态向量为:
无人机的控制信号向量为:
u=[u
得到状态空间方程为:
其中
状态空间方程简记为
进一步地,所述时间最优性目标约束模型为:
P1:
s.t.C
C
C
C
C
C
C
C
C
C
C
其中,U
进一步地,所述能量最优性模型为:
P2:
s.t.
C
C
C
C
C
C
C
C
C
C
其中,U
与现有技术相比,本发明具有以下有益效果:
(1)本发明在进行无人机三维轨迹优化时,考虑了无人机的平动以及转动的动力学方程,使得优化出的轨迹更符合无人机的动力学特性;能量消耗模型在建模时,没有对无人机运动做过多限制,因此能耗模型适合无人机二维平面运动、三维空间运动、变加速度运动等运动状态的能量消耗估计;在优化建模时,优化的能量结果直接体现无人机的电能消耗,相比现有仅考虑有效能量的方法,本发明可以考虑了电能转化为有效能量的转化效率,因此优化结果更能体现最终能量消耗。与现有技术相比,本发明具有应用场景广,能量消耗模型适用于各类无刷电机驱动的无人机,三维轨迹规划结果更符合无人机动力学特性。
附图说明
图1为本发明方法的流程图。
图2为本发明-实施例中构建的四旋翼无人机模型坐标系示意图。
具体实施方式
下面结合附图说明和实施例对本发明作进一步说明,本发明的方式包括但不仅限于以下实施例。
实施例
如图1、2所示,本发明公开的本发明的目的在于提供一种用于辅助通信系统高能效的无人机的三维轨迹优化方法,用于规划单个无人机完成一个通信节点的数据收集或传播的三维轨迹,使得可以显著提高无人机辅助通信的效率。
首先,建立以地面O
其中,m是无人机机体总质量,g是当地重力加速度,L是四旋翼的悬臂长度;J
建立自由空间的LoS信道模型,根据已知的环境噪声、发射功率、以及载波波长,确定每个时刻接收端信道容量:
其中,W是通信带宽,P是通信发射端发射功率,σ
再根据无人机所用电动机性能参数,以及无人机的通信系统额定功率,得到无人机的无刷电机功率消耗及无人机的总体消耗功率:
P
其中
C
从而得到无人机总体消耗功率:
其中,P
进一步根据无人机的平移运动方程和旋转运动方程,信道容量方程和功率消耗方程,构建无人机的状态空间方程,其中,
无人机的状态向量为:
无人机的控制信号向量为:
u=[u
得到状态空间方程为:
其中
状态空间方程简记为
最后,根据状态空间方程,分别以时间最优性和能量最优性为目标,添加无人机安全飞行状态约束、通信任务约束,建立优化模型,获得无人机的三维优化轨迹。
其中,所述时间最优性目标约束模型为:
P1:
s.t.
C
C
C
C
C
C
C
C
C
C
其中,U
所述能量最优性模型为:
:P2:
s.t.
C
C
C
C
C
C
C
C
C
C
其中,U
通过上述方法,本发明在进行无人机三维轨迹优化时,考虑了无人机的平动以及转动的动力学方程,使得优化出的轨迹更符合无人机的动力学特性;能量消耗模型在建模时,没有对无人机运动做过多限制,因此能耗模型适合无人机二维平面运动、三维空间运动、变加速度运动等运动状态的能量消耗估计;在优化建模时,优化的能量结果直接体现无人机的电能消耗,相比现有仅考虑有效能量的方法,本发明可以考虑了电能转化为有效能量的转化效率,因此优化结果更能体现最终能量消耗。与现有技术相比,本发明具有应用场景广,能量消耗模型适用于各类无刷电机驱动的无人机,三维轨迹规划结果更符合无人机动力学特性。因此,本发明具有突出的实质性特点和显著的进步。
上述实施例仅为本发明的优选实施方式之一,不应当用于限制本发明的保护范围,但凡在本发明的主体设计思想和精神上作出的毫无实质意义的改动或润色,其所解决的技术问题仍然与本发明一致的,均应当包含在本发明的保护范围之内。
- 用于辅助通信系统高能效的无人机的三维轨迹优化方法
- 用于辅助通信系统高能效的无人机的三维轨迹优化方法