一种便携式无人机动平台自主起降引导系统及方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于无人机空间定位技术领域,具体的说是一种便携式无人机动平台自主起降引导系统及方法。
背景技术
随着无人系统的飞速发展,涌现出各类功能完善,各具特色的无人系统。包括无人机、无人船、无人车、还有很多水下无人系统。这些无人系统具备很多优点的同时,也出现了一些不足。例如,无人机可以在空中自主飞行,视野开阔,大多用于测绘侦查,监测领域,但很多这种小型无人机,尤其是旋翼类的无人机飞行时限有限,而地面无人系统续航能力强,但检测侦查视野有限;所以为了提高无人系统的侦查工作效率,空地子母平台跨域协作成为了研究热点。空地跨域协作中有一个重要的核心系统就是动平台自主起降引导系统,不同的应用需求对动平台引导系统提出了更高的要求。目前市面上大多用的就是视觉引导系统,但视觉引导系统对环境依赖较强,强光或弱光都会影响其定位精度,而单纯的GPS引导又只局限于室外空旷的通视环境中。而且对于子母移动平台来说一般平台尺寸较小,对定位精度要求很高,尤其在室内室外环境下一种可靠的,精度高的动平台引导系统成为迫切需求。
发明内容
针对上述问题,本发明的目的在于提供一种便携式无人机动平台自主起降引导系统及方法,该系统小巧轻便,可以安装到无人车、无人船等各类无人或有人移动平台上,实现在室内和室外环境下的无人机动平台自主起降飞行的精确引导。
为了实现上述目的,本发明采用如下技术方案:一种便携式无人机动平台自主起降引导系统,包括:无人机机载端和地面车载端;所述地面车载端包括无人机降落平台、车载端GPS模块、支撑杆机构、车载端UWB基站、车载端控制器及车载端无线数传模块,其中无人机降落平台的四角通过支撑杆机构安装有四组车载端UWB基站,所述车载端GPS模块设置于无人机降落平台上,所述无人机机载端包括机载端控制器和与其连接的机载端UWB测距模块、机载端GPS定位板卡、机载端无线数传模块。
所述支撑杆机构包括支撑杆和电机,其中电机安装在所述无人机降落平台上、且输出轴与所述支撑杆连接,所述电机驱动所述支撑杆在所述无人机降落平台所在的平面内转动;所述车载端UWB基站设置于所述支撑杆的末端。
所述支撑杆的转动角度为0°-135°。
所述无人机降落平台为方形结构,并且边长大于等于所述支撑杆的长度;所述无人机降落平台采用铝型材制成,并且边长为1米。
所述电机的输出轴通过轴承与所述无人机降落平台连接,并且与所述无人机降落平台垂直。
所述无人机机载端和地面车载端还设有存储数据的SD卡、提示状态的指示灯;所述机载端和车载端的控制器供电电压为12V直流电,地面车载端的电机供电为24V直流电。
一种便携式无人机动平台自主起降引导方法,包括:
控制器实时检测GPS信号强度和搜星数量;
当GPS信号弱时,启动UWB测距方式测量无人机机载端与地面车载端的位置距离;
否则,启动GPS测量无人机机载端与地面车载端的位置距离。
所述控制器实时检测GPS信号强度和搜星数量包括:机载控制器和地面控制器实时检测GPS信号强度和搜星数量。
当GPS信号弱时启动UWB测距方式测量无人机机载端与地面车载端的位置,包括:
当无人机飞行环境为室内或室外的GPS弱信号区域时,车载端控制器自动输出指令控制旋转电机转动,从而带动四个支撑杆由折叠状态运动至预设角度位置;
启动机载UWB模块与4个UWB基站相互配合进行测距,车载端控制器发送用于降落引导的位置数据给机载控制器,从而引导无人机降落位置。
当无人机飞行环境为室外的GPS强信号区域时,启动机载GPS定位板卡和地面GPS模块配合进行测距,车载端控制器发送用于降落引导的位置数据给机载控制器,用于定位无人机在无人机降落平台上的降落位置。
本发明的优点及有益效果是:
1.本发明实现无人机空间定位及无人机与地面无人平台间的相对定位及引导,满足无人机在动平台上的自主起降功能,其最大优点就是根据信号强度自由切换引导方式(UWB或GPS),可通用于室内室外,不受时间,空间影响。
2.本发明地面车载端平台小巧轻便,自动折叠后尺寸为1x1米方框,重量不超过15公斤,可很方便的安装到各类地面无人(无人车、无人船)或有人平台。便携,使用方便,不受空间限制,操作简单,实用。
3.本发明的自动伸展机构不仅解决了UWB模块距离较近导致的电磁干扰,还增加了系统的可靠性。
4.本发明无人机机载端和地面车载端具备丰富的接口及通信协议内嵌,可以和各类无人机通信,可通用与各类子母平台空地跨域协作所需的相对定位及引导。
附图说明
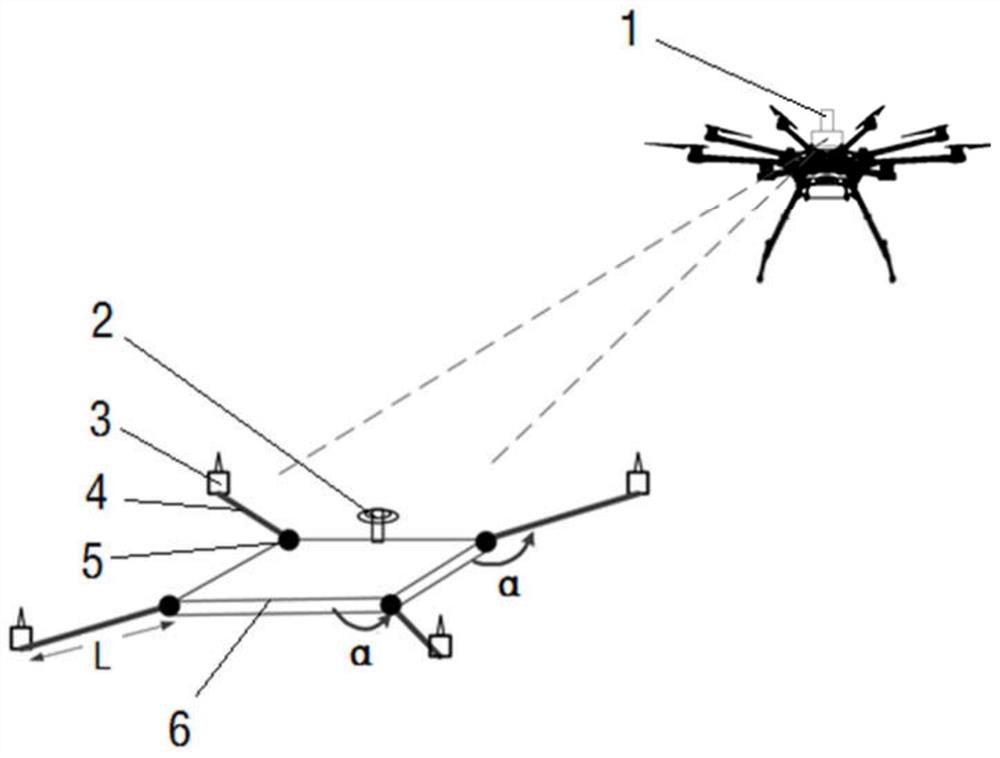
图1为本发明的结构示意图;
图2为本发明地面车载端的工作状态示意图;
图3为本发明地面车载端的收拢状态示意图。
其中:1为无人机机载端,2为车载端GPS模块,3为车载端UWB基站,4为支撑杆,5为电机,6为无人机降落平台,α为支撑杆摆动角度,L为支撑杆长度。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1-3所示,本发明提供的一种便携式无人机动平台自主起降引导系统,包括:无人机机载端1和地面车载端;地面车载端包括无人机降落平台6、地面GPS模块2、支撑杆机构、车载端UWB基站3、车载端控制器及车载端无线数传模块,其中无人机降落平台6的四角通过支撑杆机构安装有四组车载端UWB基站3,车载端GPS模块2设置于无人机降落平台6上。无人机机载端1包括机载端UWB测距模块、机载端GPS定位板卡、机载端控制器和机载端无线数传模块。
支撑杆机构包括支撑杆4和电机5,其中电机5安装在无人机降落平台6上、且输出轴与支撑杆4连接,电机5驱动支撑杆4在无人机降落平台6所在的平面内转动;车载端UWB基站3设置于支撑杆4的末端。支撑杆4的转动角度为0°-135°。
本发明的实施例中,无人机降落平台6为方形结构,并且边长大于等于支撑杆4的长度。无人机降落平台6采用铝型材制成,并且边长为1米。电机5的输出轴通过轴承与无人机降落平台6连接,并且与无人机降落平台6垂直。
无人机机载端1包括机载端UWB测距模块、机载端GPS定位板卡、机载端控制器和机载端无线数传模块,和地面端配合共同获取无人机相对于无人机降落平台6上的目标降落点位置。地面车载端包括一个地面控制器、无线数传模块(在无人机降落平台6内部集成),四个车载端UWB基站3和车载端GPS定位模块2组成,四个车载端UWB基站3固连在每个支撑杆4顶端,四个支撑杆4通过电机与无人机降落平台连接,电机轴承可根据车载端控制器指令旋转,在引导降落模式下将四个支撑杆旋转扩张到设定位置,即与降落平台边缘135°夹角,在无需UWB定位时可自动收拢到折叠状态。
进一步地,无人机机载端1包括机载端UWB测距模块、机载端GPS定位板卡、机载端控制器和机载端无线数传模块,和地面端配合共同解算无人机相对于目标降落点位置。机载端UWB模块和地面车载端的4个UWB基站进行测距,机载端控制器根据测得的距离信息进行相对定位解算,主要解决在室内无GPS信号下的无人机动平台自主起降定位引导。机载GPS定位板卡和车载端GPS模块进行相对定位测距,通过车载端控制器解算后经过车载端无线数传模块发送给无人机,主要解决在室外环境下的无人机动平台自主起降高精度引导定位。
无人机机载端控制器和车载端控制器是该系统的核心控制器,是自己设计研发的,主处理器采用STM32-ARM处理器,机载端和车载端的UWB模块型号为P440,GPS板卡是诺瓦泰的718D板卡,无线数传型号是MM2-T,机载端和车载端控制器供电电压为12V直流电,地面车载端电机供电为24V直流电。
本发明的一种便携式无人机动平台自主起降引导方法,主要包括:机载控制器和地面控制器实时检测GPS信号强度和搜星数量;当无人机进入动平台起降引导状态时,无人机位置解算模块根据定位传感器信号(传感器指GPS和UWB方式的传感器)强度或搜星数量来预估引导定位精度方差,然后做出是否开启UWB定位方式,若需要,地面车载端会自动伸展UWB支撑杆4,进入定位状态,自动伸展是为了解决UWB模块距离较近导致的电磁干扰问题。当在室外环境下GPS信号足够强时优先考虑GPS引导定位,当在室内和室外GPS信号弱的情况下才开启UWB引导定位模式。
进一步地,无人机机载端和地面车载端都具备丰富的通信接口,可以和不同型号的飞控和地面操控站进行通信,通用性很强。
进一步地,地面引导平台尺寸平台为变长1米的方形铝型结构组成,地面平台总重不超过15公斤,轻巧,便携,可以很方便的安装到各类地面无人平台上,可使用于各类子母平台空地协作相对定位、定姿、引导起降需求。便携式无人机动平台自主起降引导系统上电运行后初始化成功指示灯亮起,则地面车载端控制器伸展UWB基站等待无人机进入自主起飞状态,当无人机自主起飞后进入自主悬停状态,等待上位机指挥部门下达飞行任务,无人机完成飞行任务后自主飞回地面车载端平台上空悬停,并且进入自主降落状态,自主降落成功后地面车载端控制器将安装有UWB基站的支撑杆4自动收拢,完成一次完整的动平台自主起降引导过程。本发明实现无人机空间定位及无人机与地面无人平台间的相对定位及引导,满足无人机在动平台上的自主定位起降功能,其最大优点就是根据信号强度自由切换引导方式(UWB或GPS),可通用于室内室外,不受时间,空间影响。而且本发明地面车载端平台小巧轻便,自动折叠后尺寸为1米方框,重量不超过15公斤,可很方便的安装到各类地面无人(无人车、无人船)或有人平台。便携,使用方便,不受空间限制,操作简单,实用。此外,本发明无人机机载端和地面车载端具备丰富的接口及通信协议内嵌,可以和各类无人机通信,可通用与各类子母平台空地跨域协作所需的相对定位及引导。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种便携式无人机动平台自主起降引导系统及方法
- 一种垂直起降无人机移动平台自主着陆的控制方法及系统