一种智能制造系统动态调度方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于复杂制造系统动态调度技术领域,具体涉及一种智能制造系统动态调度方法。
背景技术
智能制造系统是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能以一种高度柔性与集成不高的方式,借助计算机模拟人类专家的智能活动进行分析、推理、判断、构思和决策等,从而取代或者延伸制造环境中人的部分脑力劳动。同时,收集、存贮、完善、共享、集成和发展人类专家的智能。
智能制造系统生产过程复杂,由多个相关联的生产过程构成。当制造过程比较平稳时,原定调度策略能够持续保证系统生产性能的优化;而当制造系统出现机器故障等扰动时,制造环境发生变化,先前采用的调度策略失效,最终无法得到期望的生产性能。因此,如何根据生产过程状态动态地确定有效的调度策略是提高智能制造系统运行性能的关键。这种根据制造系统生产状态来动态调整调度策略的方法即为智能制造系统动态调度。
数据驱动建模的方法精确度高且计算效率高,将数据驱动思想运用在生产调度领域,采用有效的方法分析累积的生产数据,提取相关知识并用于指导生产,是制造系统动态调度问题研究的重要方向。
机器学习是数据驱动建模的有效方法,基于机器学习获得的数据驱动的动态调度模型,大致可分为分类模式和回归模式两大模式,其中,分类模式是指在动态调度过程中从已有的调度策略集中选择某个调度策略来满足制造系统的调度目标;回归模式是指在动态调度过程中采用含有参数的调度策略并给定一组特定的参数值,来实现制造系统的调度目标。
智能制造系统动态调度是一个多约束、多目标的优化问题,但是,基于分类调度模型通常是以简单的启发式调度规则为调度策略,难以满足制造系统多目标多约束的要求;基于传统的极限学习机回归模型利用岭回归方法,是采用试凑法获取最优正则化系数的方式求取输出权值矩阵,但这种方法计算负担过重、计算效率低,泛化性能较差,难以满足智能制造系统的需求,因此设计高效的回归模型对智能制造系统动态调度具有十分重要的意义。
发明内容
有鉴于此,本发明提供了一种智能制造系统动态调度方法,通过采用建立的基于衰减正则化项的增量型极限学习机的智能制造系统回归调度模型,能够实时生成与生产状态相适应的调度规则权重组合,从而实现了满足多目标优化的智能制造系统的动态调度。
本发明提供的一种智能制造系统动态调度方法,包括以下步骤:
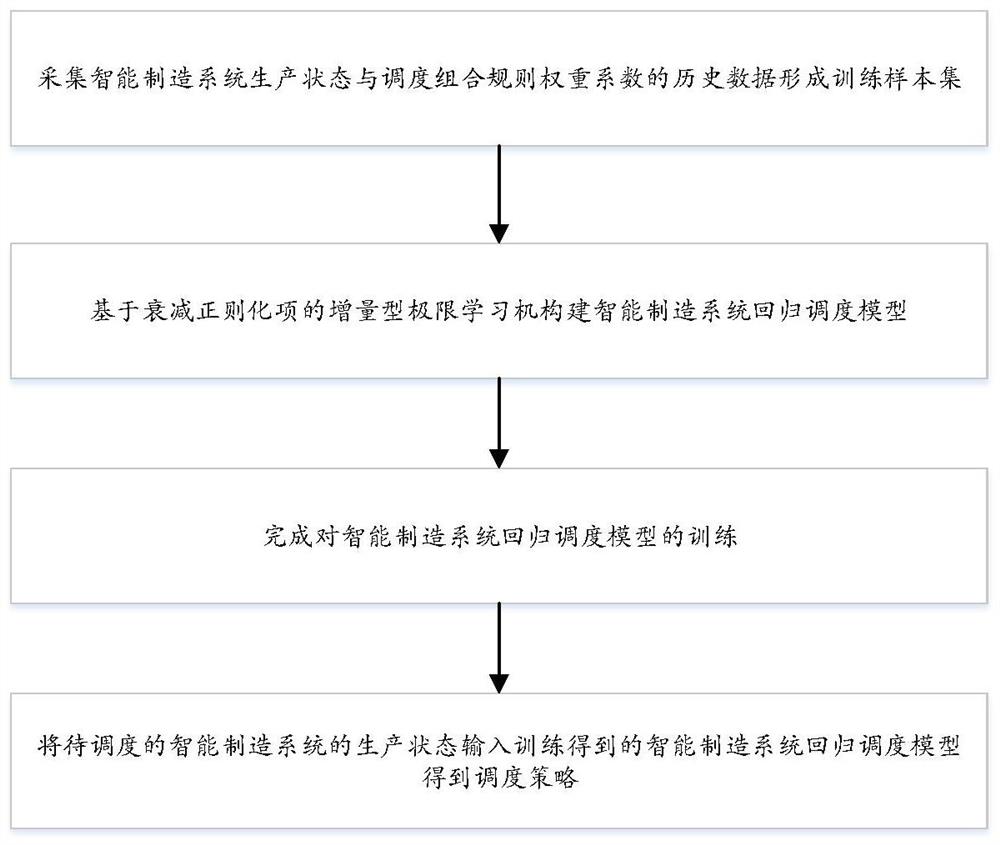
步骤1、采集智能制造系统生产状态与调度组合规则权重系数的历史数据形成训练样本集{X
步骤2、基于衰减正则化项的增量型极限学习机构建智能制造系统回归调度模型,如公式(1)所示:
其中,F
步骤3、采用所述步骤1生成的训练样本完成对所述智能制造系统回归调度模型的训练;
步骤4、应用中,将待调度智能制造系统的生产状态输入所述步骤3中训练得到的智能制造系统回归调度模型中,得到所述待调度智能制造系统的调度组合规则的权重系数,即为调度策略。
进一步地,所述步骤3采用基于衰减正则化系数的迭代最小二乘算法求取智能制造系统回归调度模型的隐含层节点的输出权值矩阵的方式进行训练,包括以下步骤:
步骤3.1、采用公式(2)计算第i个隐含层节点所对应的衰减正则化系数:
步骤3.2、采用基于衰减正则化系数的最小二乘法计算第i个隐含层节点的输出权值矩阵,如公式(3)所示:
式中,
步骤3.3、采用公式(4)计算第i个隐含层节点所对应的衰减正则化项:
步骤3.4、根据所述步骤3.2和3.3中计算出的所述输出权值和衰减正则化项,采用公式(5)计算模型当前的误差值:
式中,
步骤3.5、令i自加1,当i≤L,执行步骤3.1;否则,则完成训练,输出全部隐含层节点的输出权值矩阵W
有益效果:
1、本发明通过采用基于衰减正则化项的增量型极限学习机构建智能制造系统回归调度模型,引入了衰减正则化项实现了自适应的获取正则化系数,提高了建模精度,加快了网络的训练速度,满足了智能制造系统调度的多目标多约束的要求,为更准确地进行智能制造系统动态调度建模提供了新思路和新途径。
2、本发明利用基于衰减正则化系数的迭代最小二乘算法求取隐含层节点的输出权值矩阵,减小了迭代前期输出权重之间的差异,优化了网络结构增加了网络的稳定性,并在一定程度上加快了网络的收敛速度,进一步提高了计算效率,从而进一步满足了智能制造系统动态调度多目标优化的需要。
附图说明
图1为本发明提供的一种智能制造系统动态调度方法的流程图。
具体实施方式
下面结合附图,对本发明进行详细描述。
本发明提供的一种智能制造系统动态调度方法,其基本思想是:基于衰减正则化项的增量型极限学习机构建智能制造系统回归调度模型,以智能制造系统生产状态与组合规则权重系数的历史数据作为样本,完成智能制造系统回归调度模型的训练,将智能制造系统的生产状态输入训练得到的智能制造系统回归调度模型即可得到智能制造系统的调度方案。
本发明提供的一种智能制造系统动态调度方法,如图1所示,具体包括以下步骤:
步骤1、采集智能制造系统生产状态与调度组合规则权重系数的历史数据形成训练样本集。样本为{X
步骤2、基于衰减正则化项的增量型极限学习机构建智能制造系统回归调度模型,如公式(1)所示:
其中,F
步骤3、采用步骤1生成的训练样本完成对步骤2建立的智能制造系统回归调度模型的训练。
训练样本分为两个部分,一部分用于训练,另一部分用于测试;当智能制造系统回归调度模型的训练完成后,利用测试样本进行测试。
步骤4、应用中,将待调度的智能制造系统的生产状态输入步骤3中训练得到的智能制造系统回归调度模型中,得到待调度的智能制造系统的调度组合规则的权重系数,根据权重系数生成调度策略。
为了进一步优化网络结构、增加网络的稳定性,加快网络的收敛速度提高计算效率,本发明还提出了采用基于衰减正则化系数的迭代最小二乘算法求取智能制造系统回归调度模型的隐含层节点的输出权值矩阵的方式,具体包括如下步骤:
定义,Y
步骤1.1、人为设置常数c,采用公式(2)计算第i个隐含层节点所对应的衰减正则化系数:
步骤1.2、采用基于衰减正则化系数的最小二乘法计算第i个隐含层节点的输出权值矩阵,如公式(3)所示:
式中,
步骤1.3、采用公式(4)计算第i个隐含层节点所对应的衰减正则化项:
步骤1.4、根据步骤1.2和1.3中计算出的输出权值和衰减正则化项,采用公式(5)计算智能制造系统回归调度模型当前的误差值:
式中,
步骤1.5、令i自加1,当i≤L,执行步骤1.1;否则,则完成训练,输出全部隐含层节点的输出权值矩阵W
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能制造系统动态调度方法
- 一种制造系统自适应动态调度方法