一种固定翼无人机通信过程能量优化方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及无人机技术领域,尤其涉及一种固定翼无人机通信过程能量优化方法。
背景技术
近来,无人飞行器(UAV)无线通信已被广泛使用,引起了越来越多的关注。使用UAV进行通信的优点是,与使用固定基础结构进行通信相比,它具有显着的性能,例如灵活的部署,强大的视线(LoS)链接,并且在大多数情况下都可以建立链接,从而使其成为可能通过直接交流。它的应用也相当广泛,并且在民用和商业领域出现了许多新应用,包括天气监视,森林火灾检测,货运,紧急搜寻和救援,通讯中继等。因此,无人机无线通信是当今最热门的通信手段之一。如何使无人机在通信过程中的能量消耗最小化成为当前比较关注的一个问题,在以上的背景下,需要进行无人机的轨迹优化,以减少无人机在飞行过程中所损耗的能量。
在“An energy efficient design for UAV communication with mobile edgecomputing”这篇文章中提出了一种带有移动边缘计算(MEC)的无人机通信系统。同时优化无人机的轨迹和任务分配以及CPU的计算速度,以最小化整个系统的能耗。通过应用离散线性状态空间近似技术获得近似优化问题,然后通过线性化将非凸约束转化为凸约束。最后,提出了一种基于凹凸过程的算法来逼近优化问题。在“Energy-Efficient UAVCommunication With Trajectory Optimization”整篇文章中,综合考虑了无人机的通信吞吐量和能耗,得出了固定翼无人机推进能耗的理论模型。在此基础上,定义了无人机通信的能效,并进行了有效的设计,使用离散线性状态空间逼近和顺序凸优化来最大化无人机的能效。
在“基于移动边缘计算的无人机能耗优化研究”这篇文章中,通过优化固定翼无人机的飞行轨迹、速度、加速度和数据卸载率以及CPU的周期频率以使得整个网络的能耗最小化。导出了数据计算的能耗模型,然后结合了数据传输能耗模型和固定翼无人机的飞行消耗模型,最后对整个问题进行了建模。由于该问题存在无穷多个优化变量且部分约束是非凸的,难以直接求解,所以首先对优化问题进行离散化,其次导出目标函数的上界并对耦合的优化变量进行解耦合,接着线性化非凸约束,最后提出了一种基于凹凸过程的算法。
以上文章虽然都通过轨迹优化来最小化无人机的能耗,大都是采用凸优化的方法来进行求解,但是可以发现,在他们的文章中都未曾考虑到无人机系统的动力学和运动学方程,也就是说,他们缺少对无人机自身的姿态进行研究。因此,本发明提出了一种控制参数化的方法,将问题转化为一个具有连续状态不等式约束和终端等式约束的非线性最优控制问题,通过梯度的方法进行求解,通过仿真,可以发现本发明的方法不仅可以有效的减少无人机在飞行过程中所产生的能耗,还可以使时间尽可能地缩小。
发明内容
本发明的目的是要提供一种固定翼无人机通信过程能量优化方法,首先通过无人机的运动学和动力学方程推导了固定高度和可变高度条件下的固定翼无人机模型。然后将该问题描述为具有连续状态不等式约束和等式约束的非线性最优控制问题,并通过控制参数化,约束转录方法和局部平滑技术等一系列方法加以解决,来最小化无人机通信所损耗的能量。最后提出一个只优化时间的情况进行对比,通过仿真证明本发明的可行性。
为达到上述目的,本发明是按照以下技术方案实施的:
本发明包括以下步骤:
S1:通过无人机坐标系的转换推导出无人机在高度固定与高度可变两种情况下的模型方程;
S2:建立一个无人机通信过程中的信道方程;
S3:建立无人机发动机能耗方程;
S4:所需要的方程建立完成后,将研究的问题描述为具有连续状态不等式约束和等式约束的非线性最优控制问题;
S5:将最优控制问题方程进行转换,将无人机无线通信问题转化为非线性最优参数选择的典型数学问题,之后通过梯度的方法进行求解,来最小化无人机的能量损耗。
本发明的有益效果是:
本发明是一种固定翼无人机通信过程能量优化方法,与现有技术相比,本发明考虑到了无人机的自身姿态问题,将无人机的运动学方程与动力学方程融入到问题之中,将问题转化成了一个具有连续状态不等式约束和等式约束的非线性最优控制问题,并提供了一个非线性最优控制问题的解决方法。通过时间变换的方法,在优化能量的同时,尽可能减少了无人机在飞行过程中所消耗的时间。通过仿真仿真结果表明,随着最小通信吞吐量的增加,无人机沿着一条近似“8”形的路径盘旋。并且考虑了一个时间优化的对比,与时间优化相比,优化后的能量轨迹更加稳定,能耗降低了很多。
同时,本发明所使用的方法同样适用于旋翼无人机上,只需要将系统模型,信道模型,能量模型改变为相对应的旋翼无人机的模型即可。
附图说明
图1是本发明的时间变化方法示意图;
图2是本发明的控制参数化离散化示意图;
图3是本发明高度不变情况下的约束转换方法示意图;
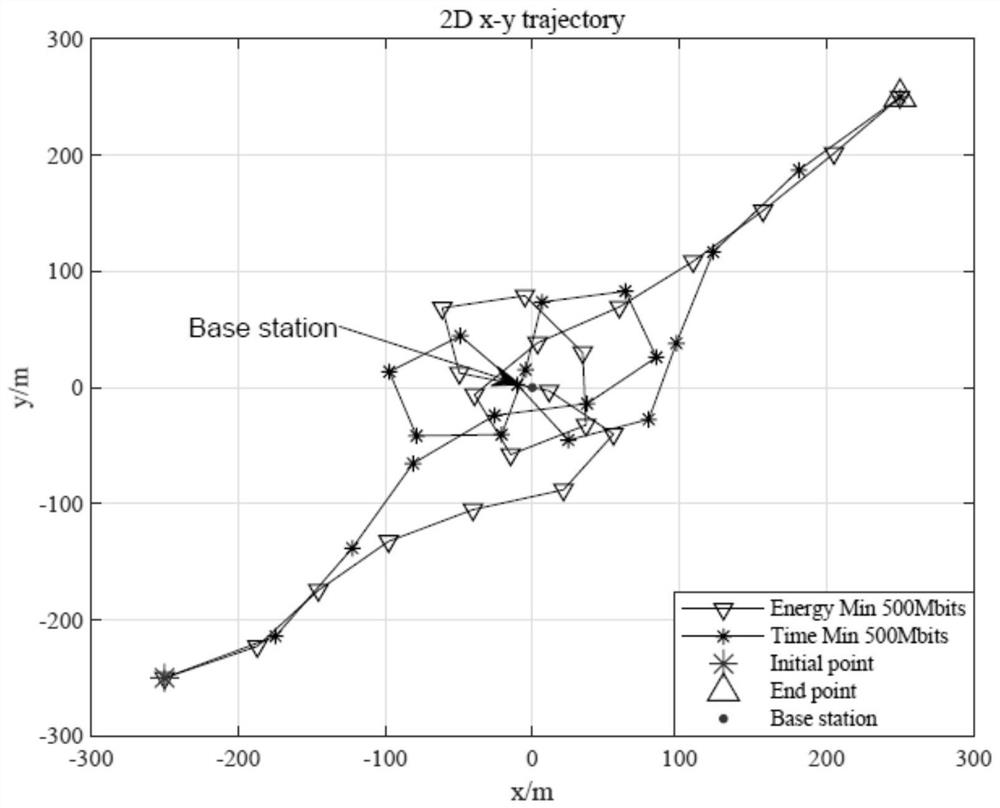
图4是本发明高度不变情况下的无人机轨迹图;
图5是本发明高度不变情况下的花费时间对比图;
图6是本发明高度不变情况下的无人机能量损耗对比图;
图7是本发明高度可变情况下的无人机轨迹图;
图8是本发明高度可变情况下的花费时间对比图;
图9是本发明高度可变情况下的无人机能量损耗对比图。
具体实施方式
下面结合附图以及具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
首先,通过在坐标系之间进行转换获得了无人机的动力学和运动学方程,得到了无人机水平飞行与高度可变两种情况的模型。建立了无人机的通信通道模型与无人机发动机能耗模型。本发明将解决的问题描述为固定翼无人机从起点飞往终点,在确保与基站之间的最小吞吐量的同时优化无人飞行器的能耗。为此,本发明添加了一些等式约束和不等式约束,并将该问题写为具有连续状态不等式约束和终端等式约束的非线性最优控制问题。为了解决该问题,针对一些难点,本发明提出了以下解决方案:(1)由于本发明的终端时间是自由的,因此本发明使用时间缩放方法,将时间作为系统参数,并从[0,T]开始转换为[0,1];(2)问题中的控制u是连续的,这对本发明来说不方便解决,因此本发明提出了一种控制参数化方法来离散控制u;(3)为了处理连续的状态不等式约束,本发明使用了约束转录方法和局部平滑技术;最后,为了更清楚地观察结果,本发明还提出了在满足无人机最小吞吐量的同时优化时间的问题。通过仿真模拟,将固定高度和可变高度条件下的能量优化与时间优化进行了比较,得出了无人机完成任务的轨迹,证明了该方法可以有效地优化飞行过程中无人机的能耗。具体如下:
设有一个任务,本发明设置其起点和终点,并在途中建立基站,让固定翼无人机满足与基站之间通信的最小吞吐量的同时,最小化无人机飞行过程中产生的能耗。
首先通过无人机坐标系的转换推导出无人机在高度固定与高度可变两种情况下的动力学方程与运动学方程。公式1为无人机在高度可变下的模型,其中γ为爬升角,χ为偏航角,μ为滚转角。T为推力,D为阻力,n代表的是无人机的负载系数。公式中的m代表包括无人机所有载荷的总质量,而g是以m/s^2为单位表示的重力加速度。公式2为推导出的无人机在高度固定下的模型。
之后,本发明建立出一个无人机通信过程中的信道模型,如公式3
其中,设基站处于坐标系原点处,B是信道带宽,ρ
由于本发明所有研究的是固定翼无人机,对于一架固定翼无人机来说,在飞行过程中所损耗的能量主要是发动机所产生的能耗,通信产生的能耗和其他能耗相对较小,因此本发明可以忽略其他能耗,而仅考虑发动机能耗,所以本发明可以将无人机的能耗模型写为
公式4中,F为无人机发动机所产生的力,用于使无人机向前移动并克服前进产生的阻力,V为无人机飞行速度。
本发明所需要的模型建立完成后,便可以将本发明所研究的问题描述为具有连续状态不等式约束和等式约束的非线性最优控制问题,如下所示
x(0)=x
x(T)=x
y(0)=y
y(T)=y
z(0)=z
z(T)=z
V(0)=v
χ(0)=χ
γ(0)=γ
V
z≥z
F
μ
n
x(0)=x
x(T)=x
y(0)=y
y(T)=y
V(0)=v
χ(0)=χ
V
F
μ
P1为高度可变下的问题描述,P2为高度不变下的问题描述,其中x
对于这样一个最优控制问题,可以发现还有许多难点,并不好进行处理,为此本发明要将此优化问题方程进行进一步的转换。
首先,由于问题中断时间并不固定,为此本发明采用了时间变换的方法,将时间由0-T,转换为0-1。
如图1所示,可以得到
这样,便可以将原来的方程写为
其次,发现控制u是连续的,这并不方便进行求解,为此,本发明通过控制参数化的方法,将其进行离散化,如图2所示。
本发明在时间段[0,1]中将u分为P个部分,每个部分都是一个常数,并且u的值从一个常数跳到另一个常数,本发明可以得到分段常量的近似函数
公式7中s
本发明便可以将控制u写为
最后,对于本发明的不等式约束,将约束写为
如图3所示,发现并不平滑,这意味着无法找到公式10的梯度来解决问题,因此,通过约束转换和平滑技术来将本发明的不等式约束进行处理。
本发明需要将约束近似为一个光滑函数
公式11中,ε>0,本发明可以将公式10写为
如图3所示,可以看出公式12现在是一个平滑函数,但是由于它是一个受约束的近似值,因此更精确地表示为ε→0,因此这种近似值可能导致无法满足所有约束条件。为了克服这些困难,对于每个i,本发明引入了一个新的约束
这样,本发明通过一系列的变换,将无人机无线通信问题转化为非线性最优参数选择的典型数学问题,之后便可以通过梯度的方法进行求解,来最小化无人机的能量损耗。
图4为本发明在高度不变情况下最小吞吐量500Mbits时的无人机轨迹;
图5为本发明在高度不变情况下时间优化与能量优化在不同最小吞吐量花费时间对比数据;
图6为本发明在高度不变情况下时间优化与能量优化在不同最小吞吐量能量损耗对比数据;
图7为为本发明在高度可变情况下最小吞吐量500Mbits时的无人机轨迹;
图8为本发明在高度可变情况下时间优化与能量优化在不同最小吞吐量花费时间对比数据;
图9为本发明在高度可变情况下时间优化与能量优化在不同最小吞吐量能量损耗对比数据。
本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。
- 一种固定翼无人机通信过程能量优化方法
- 一种基于能量调度的通信系统及其通信吞吐量优化方法