一种多段贴合适应形状的盆类物品搬运器
文献发布时间:2023-06-19 11:40:48
技术领域
本发明属于搬运领域,尤其是涉及一种多段贴合适应形状的盆类物品搬运器。
背景技术
目前,现有大型盆类物品(如大型花盆、工厂中用的一些载物盆)的搬移方式主要是直接两人抓住大型盆的边缘进行搬移,导致在搬移过程中大型盆边缘光滑不易抓住;以及直接抓住盆边缘搬移时,不仅力臂短比较消耗力气,而且搬移人员靠近太近行走不便利,现有的盆类搬运装置虽有一定的省力效果,但是众所周知现在的盆外观多种多样,现有的技术搬运的盆太过单一,不能够对不同弧度的盆进行搬运,因此,亟待设计一种可以针对不同弧度的盆和方形的盆进行搬运的盆类搬运器。
发明内容
本发明为了克服现有技术的不足,提供一种可以针对不同弧度的花盆和方形的花盆进行搬运的花盆搬运器。
为了实现上述目的,本发明采用以下技术方案:一种多段贴合适应形状的盆类物品搬运器,包括支撑块,所述支撑块的左侧上下对称设置有两个固定板;
两个夹持机构,两个夹持机构对称设置,两个所述夹持机构设置在所述两个固定板的上方,所述夹持机构用于对不同形状的盆进行夹持;
两个支撑机构,两个支撑机构对称设置,两个所述支撑机构分别设置在两个所述夹持机构的下方,所述支撑机构用于对盆进行支撑。
优选的,两个所述固定板相互远离的一侧左右对称设置有两个滚轮轴,每个所述滚轮轴上转动套设有滚轮。
优选的,所述夹持机构包括开设在所述第一电磁块中第一电磁槽,所述第一电磁槽中固定设置有第一电磁块,所述第一电磁槽的上端面滑动设置有两个前后对称的第一电磁滑块,每个所述第一电磁滑块的上端面固定设置有竖直移动块,每个所述竖直移动块的右端面上部固定设置有推手,每个所述竖直移动块开设有第二电磁槽,每个所述第二电磁槽中固定设置有第二电磁块,所述第二电磁槽中设置有与所述第二电磁块滑动连接的第二电磁滑块,每个所述第二电磁滑块的左侧固定设置有电磁连接块,每个所述电磁连接块中开设有多个第一槽,每个所述第一槽滑动设置有夹持组件。
优选的,所述夹持组件包括滑动设置在所述第一槽中的滑动齿条,所述滑动齿条靠近所述支撑块的一侧固定设置有第一固定块,所述第一固定块靠近所述电磁连接块的一侧与所述电磁连接块之间固定设置有伸缩弹簧,所述滑动齿条靠近所述支撑块水平中心线的一端设置有转动块,所述转动块开设有转动槽,所述转动槽的前后侧壁之间转动设置有第一轴,所述第一轴上套设有滑动齿条,所述滑动齿条与所述转动槽的后侧壁之间设置有第一扭簧,所述转动块开设有第二槽,所述第二槽的前后侧面之间开设有第一滑槽,所述第一滑槽中滑动设置有第二滑块,两个所述第二滑块上套设有一个橡胶块,所述转动块开设有两个左右对称的弹簧槽,每个所述弹簧槽中滑动设置有第一杆,每个所述第一杆靠近所述支撑块水平中心线的一端固定设置有第二杆,所述第二杆与所述橡胶块的远离所述支撑块水平中心线的一端抵接,所述第一杆与所述弹簧槽的槽底之间固定设置有第一弹簧,所述橡胶块远离所述支撑块水平中心线的一端与所述第二槽的槽底之间固定设置有第二弹簧,两个所述弹簧槽相互靠近的一侧开设有第二滑槽,两个所述第一杆相互靠近的一侧固定设置有第二杆,所述第二杆在所述第二滑槽中滑动,两个所述第二杆相互靠近的一端固定设置有第一齿条,所述第二槽前后侧面之间转动设置有第一齿轮轴,所述第一齿轮轴的后部套设有第一单向轴承,所述第一单向轴承上固定套设有第二齿轮,所述第一齿轮轴的前部套设有与所述第一齿条啮合的第一齿轮,所述第二槽的槽底固定设置有两个左右对称的第三杆,两个所述第三杆相互远离的一侧滑动设置有第二齿条,两个所述第二齿条的上端面与所述橡胶块远离所述支撑块水平中心线的一侧抵接,所述第二齿条与所述第二齿轮啮合。
优选的,每个所述第一槽的上侧壁均开设有第三槽,每个所述第三槽的左右侧壁之间转动设置有第二轴,每个所述第二轴上套设有与所述滑动齿条啮合的第三齿轮,每个所述第二轴上套设有棘轮,所述棘轮位于所述第三齿轮的右侧且与所述第三齿轮固定连接,每个所述棘轮的右侧壁与所述第三槽的侧壁之间固定设置有扭簧,所述第三槽的上侧壁开设有第一通孔,所述第一通孔中滑动设置有限位杆,所述电磁连接块的上端面设置有拉杆,所述拉杆的下端面与所述电磁连接块的上端面抵接,所述限位杆向上延伸惯穿所述拉杆,所述限位杆的上端面固定设置有第四杆,所述第四杆的与所述拉杆之间固定设置压缩弹簧。
优选的,所述支撑机构包括固定设置在两个电磁连接块相互远离一侧的伸缩杆,每个所述伸缩杆远离所述电磁连接块的一端固定设置有环形块,每个所述环形块的内环侧面上固定设置有第一滑块,所述固定板开设有第四槽,所述第四槽开设有第二通孔,所述第二通孔中滑动设置有支撑板,所述第四槽的下端面转动设置有螺纹杆,所述螺纹杆上固定套设有第二单向轴承,所述第二单向轴承上套设有与所述支撑板啮合的第四齿轮,所述第一滑块与所述螺纹杆上螺纹槽抵接。
综上所述,本发明具有以下优点:
1.本装置结构简单,夹持机构可以根据盆的不同形状调整的自己的形态,还可以做到每一个接触面的受力相同。
2.支撑机构,可以再将盆抬起的同时将底部的支撑板深出,然后将盆放在支撑板上面减少每一个支撑点的受力。
附图说明
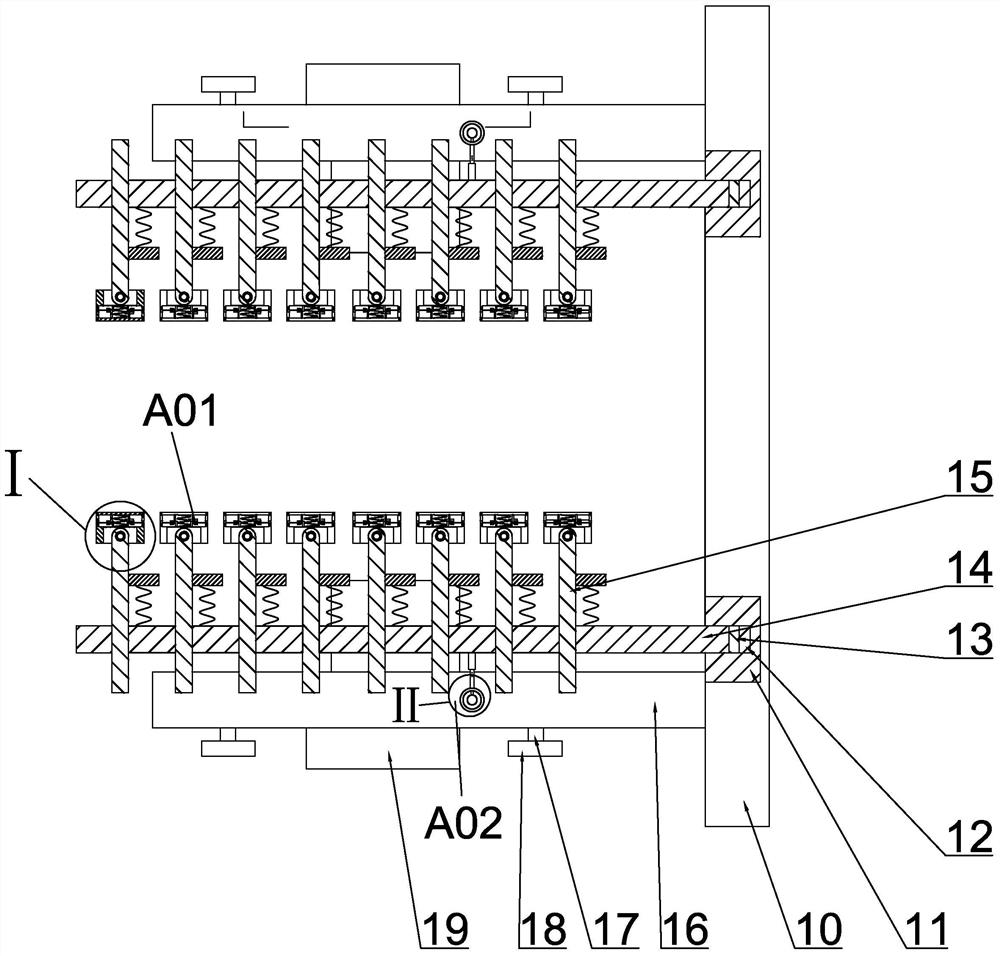
图1为本发明结构实施例提供的一种多段贴合适应形状的盆类物品搬运器的剖视图;
图2为图1的仰视图;
图3为图2中A-A处切断后的部分结构示意的剖视图;
图4为图1中Ⅰ处的局部放大图;
图5为图4中B-B处的局部放大图;
图6为图2中C-C处的局部放大图;
图7为图1中Ⅱ处的剖视图。
图中,支撑块10;竖直移动块11;第二电磁块12;第二电磁滑块13;电磁连接块14;滑动齿条15;固定板16;滚轮轴17;滚轮18;支撑板19;伸缩杆20;环形块21;螺纹杆22;第一滑块23;转动块24;转动槽25;弹簧槽26;第一弹簧27;第一杆28;第二杆29;橡胶块30;第二杆31;第一齿条32;第一齿轮轴33;第一齿轮34;第二弹簧35;第二齿条36;第二滑块37;第三杆38;第二槽39;第一轴40;第二齿轮41;第一单向轴承42;第三槽43;第二轴44;棘轮45;第三齿轮46;拉杆47;限位杆48;第三弹簧49;第四杆50;第四槽51;第四齿轮52;第二单向轴承54;推手55;第二电磁槽56;第一电磁滑块57;第一电磁块58。
具体实施方式
如图1所示,一种多段贴合适应形状的盆类物品搬运器,包括一种多段贴合适应形状的盆类物品搬运器,包括支撑块10,支撑块10的左侧上下对称设置有两个固定板16;
两个夹持机构A01,两个夹持机构A01对称设置,两个夹持机构A01设置在两个固定板16的上方,夹持机构A01用于对不同形状的盆进行夹持;
两个支撑机构A02,两个支撑机构A02对称设置,两个支撑机构A02分别设置在两个夹持机构A01的下方,支撑机构A02用于对盆进行支撑。
结合图1-7所示,两个固定板16相互远离的一侧左右对称设置有两个滚轮轴17,每个滚轮轴17上转动套设有滚轮18。
结合图1-7所示,夹持机构A01包括开设在第一电磁块58中第一电磁槽,第一电磁槽中固定设置有第一电磁块58,第一电磁槽的上端面滑动设置有两个前后对称的第一电磁滑块57,每个第一电磁滑块57的上端面固定设置有竖直移动块11,每个竖直移动块11的右端面上部固定设置有推手55,每个竖直移动块11开设有第二电磁槽56,每个第二电磁槽56中固定设置有第二电磁块12,第二电磁槽56中设置有与第二电磁块12滑动连接的第二电磁滑块13,每个第二电磁滑块13的左侧固定设置有电磁连接块14,每个电磁连接块14中开设有多个第一槽,每个第一槽滑动设置有夹持组件。
结合图1-7所示,夹持组件包括滑动设置在第一槽中的滑动齿条15,滑动齿条15靠近支撑块10的一侧固定设置有第一固定块,第一固定块靠近电磁连接块14的一侧与电磁连接块14之间固定设置有伸缩弹簧,滑动齿条15靠近支撑块10水平中心线的一端设置有转动块24,转动块24开设有转动槽25,转动槽25的前后侧壁之间转动设置有第一轴40,第一轴40上套设有滑动齿条15,滑动齿条15与转动槽25的后侧壁之间设置有第一扭簧,转动块24开设有第二槽39,第二槽39的前后侧面之间开设有第一滑槽,第一滑槽中滑动设置有第二滑块37,两个第二滑块37上套设有一个橡胶块30,转动块24开设有两个左右对称的弹簧槽26,每个弹簧槽26中滑动设置有第一杆28,每个第一杆28靠近支撑块10水平中心线的一端固定设置有第二杆29,第二杆29与橡胶块30的远离支撑块10水平中心线的一端抵接,第一杆28与弹簧槽26的槽底之间固定设置有第一弹簧27,橡胶块30远离支撑块10水平中心线的一端与第二槽39的槽底之间固定设置有第二弹簧35,两个弹簧槽26相互靠近的一侧开设有第二滑槽,两个第一杆28相互靠近的一侧固定设置有第二杆31,第二杆31在第二滑槽中滑动,两个第二杆31相互靠近的一端固定设置有第一齿条32,第二槽39前后侧面之间转动设置有第一齿轮轴33,第一齿轮轴33的后部套设有第一单向轴承42,第一单向轴承42上固定套设有第二齿轮41,第一齿轮轴33的前部套设有与第一齿条32啮合的第一齿轮34,第二槽39的槽底固定设置有两个左右对称的第三杆38,两个第三杆38相互远离的一侧滑动设置有第二齿条36,两个第二齿条36的上端面与橡胶块30远离支撑块10水平中心线的一侧抵接,第二齿条36与第二齿轮41啮合。
结合图1-7所示,每个第一槽的上侧壁均开设有第三槽43,每个第三槽43的左右侧壁之间转动设置有第二轴44,每个第二轴44上套设有与滑动齿条15啮合的第三齿轮46,每个第二轴44上套设有棘轮45,棘轮45位于第三齿轮46的右侧且与第三齿轮46固定连接,每个棘轮45的右侧壁与第三槽43的侧壁之间固定设置有扭簧,第三槽43的上侧壁开设有第一通孔,第一通孔中滑动设置有限位杆48,电磁连接块14的上端面设置有拉杆47,拉杆47的下端面与电磁连接块14的上端面抵接,限位杆48向上延伸惯穿拉杆47,限位杆48的上端面固定设置有第四杆50,第四杆50的与拉杆47之间固定设置压缩弹簧。
结合图1-7所示,支撑机构A02包括固定设置在两个电磁连接块14相互远离一侧的伸缩杆20,每个伸缩杆20远离电磁连接块14的一端固定设置有环形块21,每个环形块21的内环侧面上固定设置有第一滑块23,固定板16开设有第四槽51,第四槽51开设有第二通孔,第二通孔中滑动设置有支撑板19,第四槽51的下端面转动设置有螺纹杆22,螺纹杆22上固定套设有第二单向轴承54,第二单向轴承54上套设有与支撑板19啮合的第四齿轮52,第一滑块23与螺纹杆22上螺纹槽抵接。
本发明实施例中提供的一种多段贴合适应形状的盆类物品搬运器的工作原理如下:
使用时,控制两个第一电磁滑块57相互远离,从而带动两个竖直移动块11相互远离,两个竖直移动块11带动两个电磁连接块14相互远离,然后推动推手55带动整个装置向前移动,使盆位于两个固定板16之间,然后控制第二电磁滑块13相互靠近使橡胶块30与盆抵接,此时转动块24会转动一定角度,由于橡胶块30为弹性橡胶块的材质所以橡胶块30与盆的外表面抵接时会产生一定的形变,由于同一水平线上设置有多个橡胶块30,所以每一个橡胶块30与盆的外表面抵接时所产生的的形变会在橡胶块30的形变范围内,橡胶块30与盆抵接时向远离支撑块10中心水平线方向移动,从而通过转动块24带动滑动齿条15向远离支撑块10中心水平线方向移动,滑动齿条15带动第一固定块移动从而拉伸伸缩弹簧,滑动齿条15受伸缩弹簧的弹力将橡胶块30紧贴在盆的侧壁上,滑动齿条15通过第三齿轮46带动棘轮45转动,此时扭簧蓄力,由于限位杆48的设置可以使棘轮45无法反转从而使滑动齿条15无法反转,可以将盆夹紧,当橡胶块30向靠近第二弹簧35的一侧凹陷时,压缩第二弹簧35,从而带动第二齿条36向下移动,由于第一单向轴承42的设置,所以第一单向轴承42不会带动第一齿轮轴33转动,当两个第二电磁滑块13继续向盆位置移动时,此时第二杆29与盆侧壁抵接的压力过大同时带动第二杆29向靠近滑动齿条15的一侧移动从而带动第一杆28移动,进而压缩第一弹簧27,第一杆28向靠近滑动齿条15的一侧移动从而带动橡胶块30移动,橡胶块30带动第一齿轮34转动从而通过第一齿轮轴33带动第一单向轴承42和第二齿轮41转动,第二齿轮41带动第二齿条36向上移动,从而抵住橡胶块30的中部使橡胶块30的中部受力抵在盆的侧壁上,有效的防止了各部位受力不均匀,将盆夹住时控制第二电磁滑块13向前移动将盆抬起,第二电磁滑块13带动电磁连接块14向前移动从而带动伸缩杆20向上移动通过伸缩杆20带动环形块21向前移动,环形块21带动第一滑块23向前移动,第一滑块23与螺纹槽抵接带动螺纹杆22转动从而通过第二单向轴承54和第四齿轮52带动两个支撑板19相互靠近,此时控制第二电磁滑块13向后移动将盆放在两个支撑板19上,分担盆的重力,等到盆搬运完毕时,将拉杆47向上拉动就可以解除对棘轮45的限位,然后扭簧复位带动滑动齿条15回复原位,然后将两个支撑板19向相互远离的位置拉回,由于第二单向轴承54的设置,所以第二单向轴承54不会带动第四齿轮52转动。
上述实施例只是本发明的较佳实施例,并不是对本发明技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本发明专利的权利保护范围。
- 一种多段贴合适应形状的盆类物品搬运器
- 一种可适应多种形状物品的工业搬运机器人