基于联结翼布局无人机的高性能低雷诺数串置层流翼型
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及航天航空技术领域,具体地涉及基于联结翼布局无人机的高性能低雷诺数串置层流翼型。
背景技术
将包括雷达在内的传感器系统集成于高空长航时无人平台,发展高性能传感器UAV(Unmanned Aerial Vehicle),在未来军民领域具有巨大应用前景,如通信中继,对时间敏感性目标进行监视、侦察等。
联结/盒式翼布局无人平台的前翼和后翼以直接或借助纵向部件间接地联结在一起,形成封闭的环状结构。联结翼布局的特点使得可将具有360°全向探测能力的大口径雷达集成于机翼平面内,同时相对于常规布局具有更多的气动舵面布置区域,较低的诱导阻力以及结构重量系数等优势。因此,联结翼布局成为最适于发展高性能传感器飞机的布局形式之一。联结翼布局的流动特征决定了前翼和后翼间存在复杂的气动干扰现象,传统单独翼型设计无法满足气动设计要求,需要开展串置翼型设计。除此之外,对于追求超长滞空时间的传感器无人平台,如临近空间太阳能UAV,通常采用层流减阻技术,同时巡航高度高、速度低,具有典型的低雷诺数流动物理特征。低雷诺数高升阻比层流翼型设计一直是高空长航时UAV气动设计的关键和难点,但由于联结/盒式翼布局前、后翼存在复杂的气动干扰,与低雷诺数高升阻比层流翼型的设计难点耦合,增大了适用于联结/盒式翼布局的翼型设计难度。同时,目前现有的关于低雷诺数高升阻比层流翼型相关文献没有考虑前、后翼气动干扰,无法适用于联结/盒式翼布局形式。联结翼布局的传感器UAV同时耦合了低雷诺数流动、层流转捩以及前、后翼气动干扰的复杂流动物理特征,串置翼型的性能直接决定了联结翼布局UAV的成败。因此,设计一种适用于联结翼布局传感器UAV的高性能低雷诺数串置层流翼型具有重要意义。
发明内容
本发明的目的在于提供一种基于联结翼布局无人机的高性能低雷诺数串置层流翼型,从而使得串置层流翼型能够满足大口径雷达布置对翼型内部空间的需求,达到30万~300万雷诺数条件,并且在宽泛的升力系数范围内具有高升力、高升阻比特点,同时层流分离泡被稳定地控制在40%c~65%c之间。
本发明提供了基于联结翼布局无人机的高性能低雷诺数串置层流翼型,包括串置层流翼型,串置层流翼型包括前置翼型和后置翼型,前置翼型具有若干个不同的前置翼型几何特征和若干个不同的前置翼型压力分布形态特征,后置翼型具有若干个不同的后置翼型几何特征和若干个不同的后置翼型压力分布形态特征。
进一步的,若干个不同的前置翼型几何特征包括前置翼型最大厚度12%c、前置翼型最大厚度位置31.9%c、前置翼型最大弯度为5.8%c以及前置翼型最大弯度位置39.2%c;若干个不同的后置翼型几何特征包括后置翼型最大厚度17%c、后置翼型最大厚度位置为33.7%c、后置翼型最大弯度为4.0%c以及后置翼型最大弯度位置35.9%c,其中,c表示翼型弦长。
进一步的,若干个不同的前置翼型压力分布形态特征包括前置翼型头部压力峰值范围为-1.5~-1.7、前置翼型头部压力峰值位置位于5%c~15%c处、在前置翼型头部压力峰值之后的前置翼型区域具有逆压力梯度;若干个不同的后置翼型压力分布形态特征包括后置翼型头部压力峰值范围为-1.0~-1.2、后置翼型头部压力峰值位置位于15%c~30%c处、后置翼型头部压力峰值之后的后置翼型区域维持逆压力梯度。
进一步的,在前置翼型头部压力峰值之后的前置翼型区域具有逆压力梯度,包括40%c~55%c的前置翼型区域具有大逆压力梯度,大逆压力梯度后的前置翼型区域维持小逆压力梯度。
进一步的,后置翼型头部压力峰值之后的后置翼型区域维持逆压力梯度,包括40%c~55%c的后置翼型区域具有大逆压力梯度,大逆压力梯度后的后置翼型区域维持小逆压力梯度。
进一步的,设计马赫数在0.04~0.2之间,雷诺数在30万~300万之间,前置翼型层流区范围以及后置翼型层流区范围均不小于40%c,下翼面层流区不小于80%c。
本发明的有益效果是:本发明前置翼型的前梁位置与后置翼型后梁位置具有较大的绝对厚度,可满足联结/盒式翼布局传感器飞行器在翼面内集成具有360°全向探测能力的大口径雷达的需求;设计工况附近宽泛的升力系数范围内,本发明设计的前置翼型和后置翼型上翼面的转捩点维持在45%c~55%c,层流分离泡再附着区域在65%c之前,具有极强的层流转捩和层流分离泡发展的鲁棒控制能力,下翼面转捩点在80%c以后维持低阻特性;本发明设计的前置翼型以及后置翼型的几何以及压力分布形态特征,充分考虑了前、后翼型间的气动干扰、低雷诺数流动以及层流转捩,具有高升力特性,在宽泛的升力系数范围内具有低气动阻力、高巡航升阻比和巡航效率因子。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
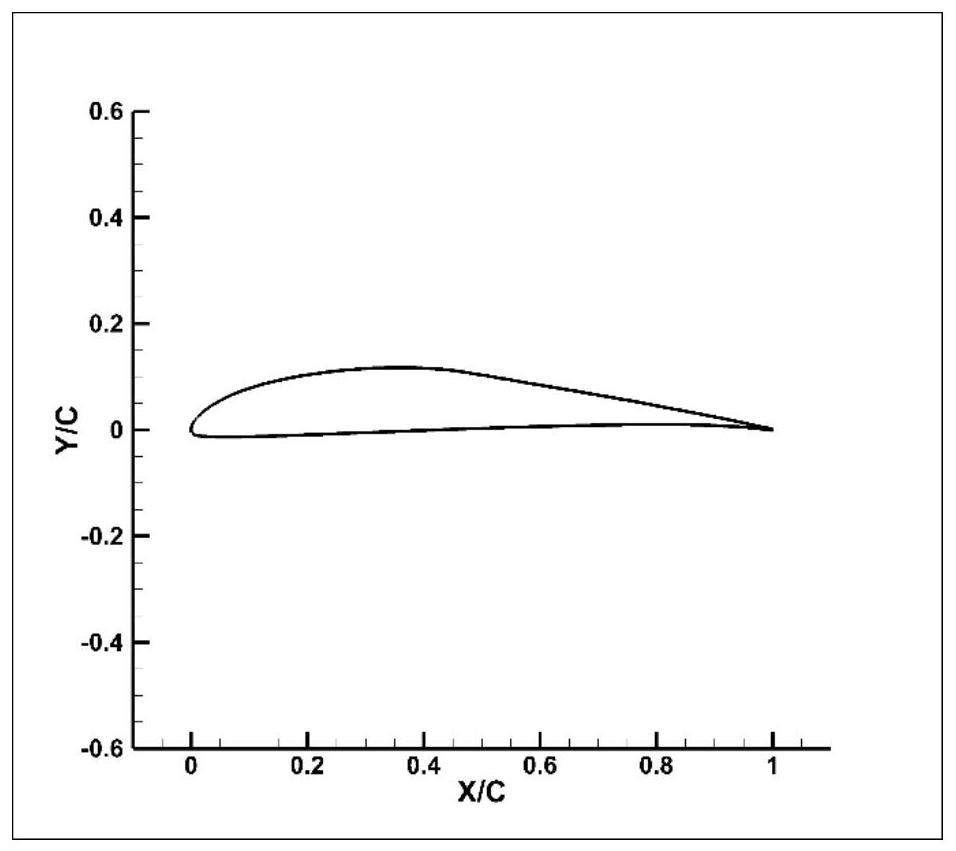
图1为本实施例一提供的低雷诺数串置翼型前置翼型示意图。
图2为本实施例一提供的低雷诺数串置翼型后置翼型示意图。
图3为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态3°攻角下前翼压力分布曲线对比图。
图4为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态3°攻角下后翼压力分布曲线对比图。
图5为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态下Alpha-CL曲线对比图。
图6为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态下Alpha-CD曲线对比图。
图7为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态下CL-CD曲线对比图。
图8为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态下Alpha-K曲线对比图。
图9为本实施例一提供的低雷诺数串置翼型与低雷诺数高升阻比翼型E387在巡航状态下Alpha-e曲线对比图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,以便一系列单元的过程、方法、系统、产品或设备不必限于那些单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他单元。
实施例一,本发明提供了基于联结翼布局无人机的高性能低雷诺数串置层流翼型,包括串置层流翼型,串置层流翼型包括前置翼型和后置翼型,前置翼型具有若干个不同的前置翼型几何特征和若干个不同的前置翼型压力分布形态特征,后置翼型具有若干个不同的后置翼型几何特征和若干个不同的后置翼型压力分布形态特征。
如图1和图2所示,若干个不同的前置翼型几何特征包括前置翼型最大厚度12%c、前置翼型最大厚度位置31.9%c、前置翼型最大弯度为5.8%c以及前置翼型最大弯度位置39.2%c;若干个不同的后置翼型几何特征包括后置翼型最大厚度17%c、后置翼型最大厚度位置为33.7%c、后置翼型最大弯度为4.0%c以及后置翼型最大弯度位置35.9%c,其中,c表示翼型弦长。
根据图1和图2所示的串置翼型几何特征,前置翼型最大厚度12%c,后置翼型最大厚度17%c,后置翼型最大厚度大于前置翼型最大厚度,允许联结/盒式翼布局UAV在满足雷达装载对盒段空间容积要求的条件下,增大气动效率更高的前翼弦长,减小气动高效率较低的后翼弦长,提升串置翼型整体的气动性能。前置翼型下翼面后缘具有弱后加载,后置翼型没有后加载,这种几何特征使得后置翼型在满足雷达装在对空间要求的条件下,减小后置翼型相对厚度,实现气动减阻。
前置翼型最大弯度为5.8%c,后置翼型最大弯度为4.0%c,这种前、后翼型的弯度配置,促使气动效率较高的前置翼型承载更多升力。前置翼型以及后置翼型的最大弯度位置分别为39.2%c和35.9%c,最大弯度位置之后的40%c~60%c区域,前置翼型以及后置翼型上翼面弯度迅速减小,60%c~80%c前置翼型以及后置翼型上翼面弯度减小趋势变化和缓,这种弯度变化几何特征保证前置翼型以及后置翼型在较宽泛的升力系数范围内,上翼面的层流分离泡被稳定的控制在40%c~65%c区域内。
如图3和图4所示,若干个不同的前置翼型压力分布形态特征包括前置翼型头部压力峰值范围为-1.5~-1.7、前置翼型头部压力峰值位置位于5%c~15%c处、在前置翼型头部压力峰值之后的前置翼型区域具有逆压力梯度;若干个不同的后置翼型压力分布形态特征包括后置翼型头部压力峰值范围为-1.0~-1.2、后置翼型头部压力峰值位置位于15%c~30%c处、后置翼型头部压力峰值之后的后置翼型区域维持逆压力梯度。
在前置翼型头部压力峰值之后的前置翼型区域具有逆压力梯度,包括40%c~55%c的前置翼型区域具有大逆压力梯度,大逆压力梯度后的前置翼型区域维持小逆压力梯度。
后置翼型头部压力峰值之后的后置翼型区域维持逆压力梯度,包括40%c~55%c的后置翼型区域具有大逆压力梯度,大逆压力梯度后的后置翼型区域维持小逆压力梯度。
图3和图4所示前置翼型以及后置翼型的压力分布形态特征显示,前置翼型头部峰值较高为1.58,后置翼型头部峰值较低。无论是前置翼型还是后置翼型,峰值之后为延续到40%c的小逆压力梯度,40%c~60%c区域为大逆压力梯度区,迫使上翼面层流在该区域发生转捩,60%c~80%c逆压力梯度减小,使得在较大的升力系数范围内将层流分离泡稳定地控制在40%~65%c。
对于本实施例提供的低雷诺数串置翼型,设计马赫数在0.04~0.2之间,雷诺数在30万~300万之间。具体地设计马赫数为0.13,雷诺数为0.3×10
设计工况内具有高升力、高升阻比,典型设计升力系数附近,前置翼型以及后置翼型层流区范围不小于40%c,下翼面层流区不小于80%c。
典型设计升力系数附近,前置翼型以及后置翼型上翼面层流分离泡再附位置不超过65%c。
串置翼型最大失速攻角不小于12°。
前置翼型前10%c~25%c,后置翼型60%c~75%c具有足够大的厚度,满足大口径雷达装载对空间的需求。
本实施例中,选取公开的低雷诺数高升阻比翼型E387作为对比翼型,将低雷诺数高升阻比翼型E387厚度分别缩放到12%c和17%c、并构成一组串置翼型,将低雷诺数高升阻比翼型E387(对应于附图中的E387_RWING或E387_TOTAL)与本发明设计的低雷诺数高升阻比串置翼型(对应于附图中的OPT_RWING或OPT_TOTAL)进行比对,分析比较本发明设计的串置翼型与对比翼型的气动性能的差异。
图5为发明设计串置翼型与对比串置翼型的升力特性曲线对比,图6为发明设计串置翼型与对比串置翼型的阻力特性曲线对比,图7为发明设计串置翼型与对比串置翼型的升阻极曲线对比,图8为发明设计串置翼型与对比串置翼型的升阻比特性曲线对比,图9为发明设计串置翼型与对比串置翼型的巡航因子特性曲线对比。通过对比可以看出,本发明设计的串置翼型具有更小的零升攻角及更优异的高升力特性。另外,发明设计的串置翼型在1.1~1.55升力系数范围内具有更小的阻力,1°~10°攻角范围内具有更高的升阻比和更大巡航因子。
通过采用本发明公开的上述技术方案,得到了如下有益的效果:
(1)前置翼型的前梁位置与后置翼型后梁位置具有较大的绝对厚度,可满足联结翼布局传感器飞行器在翼面内集成具有360°全向探测能力的大口径雷达的需求;
(2)设计工况附近宽泛的升力系数范围内,前置翼型和后置翼型上翼面的转捩点维持在45%c~55%c,层流分离泡再附着区域在65%c之前具有极强的层流转捩和层流分离泡发展的鲁棒控制能力,下翼面转捩点在80%c以后维持低阻特性;
(3)前置翼型以及后置翼型的几何以及压力分布形态特征,充分考虑了前、后翼型间的气动干扰、低雷诺数流动以及层流转捩,具有高升力特性,在宽泛的升力系数范围内具有低气动阻力、高巡航升阻比和巡航效率因子。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本发明的保护范围。
- 基于联结翼布局无人机的高性能低雷诺数串置层流翼型
- 一种匹配全翼太阳能无人机的低雷诺数翼型