机械臂和搬运装置
文献发布时间:2023-06-19 11:40:48
技术领域
本发明实施例涉及机械搬运技术领域,尤其涉及一种机械臂和搬运装置。
背景技术
6自由度机械臂的奇异点主要分为肘部奇异点和腕部奇异点,而正常搬运过程中不会触发肘部奇异点,因此我们所指的机械臂奇异点特指腕部奇异点。6自由度机械臂的奇异点发生在轴4和轴6平行时,此时轴5会产生速度和姿态的突变,从而导致末端姿态不可控(摔片盒)甚至损坏机械臂。
发明内容
本发明提供一种机械臂和搬运装置,以规避机械臂的腕部奇异点,从而提高了机械臂的可靠性。
第一方面,本发明实施例提供了一种机械臂,包括第一腕部关节、机械叉和转接块;所述第一腕部关节通过所述转接块与所述机械叉连接,所述机械叉所在平面与水平面平行时,所述第一腕部关节的轴与所述机械叉所在平面成角度设置。
可选地,所述转接块包括第一端面和第二端面,所述第一端面与所述第一腕部关节连接,所述第二端面与所述机械叉连接,所述第一端面与所述第二端面相交。
可选地,所述转接块的形状为楔形。
可选地,所述机械叉所在平面与水平面平行时,所述第一腕部关节的轴与所述机械叉所在平面的角度为10°。
可选地,所述转接块通过螺栓与所述第一腕部关节和所述机械叉连接。
可选地,机械臂还包括底座、回旋座、大臂、肘部关节、小臂、第二腕部关节和第三腕部关节,所述回旋座安装在所述底座上,所述大臂安装在所述回旋座上,所述肘部关节安装在所述大臂上,所述小臂的一端安装在所述肘部关节上,所述小臂的另一端与所述第二腕部关节连接,所述第三腕部关节安装在所述第二腕部关节上,所述第一腕部关节安装在所述第三腕部关节上。
第二方面,本发明实施例还提供了一种搬运装置,包括本发明任意实施例提供的机械臂。
可选地,搬运装置还包括自动导航小车和架设在所述自动导航小车上的运载框架;所述机械臂设置于所述运载框架上。
可选地,搬运装置还包括设置于所述运载框架上的片盒放置机构,所述片盒放置机构所在平面与水平面平行。
本发明实施例的技术方案,机械臂包括第一腕部关节、转接块和机械叉,第一腕部关节通过转接块与机械叉连接,机械叉所在平面与水平面平行时,第一腕部关节的轴与机械叉所在平面成角度设置。当机械叉所在平面与水平面平行时,第一腕部关节的轴与水平面具有一定的夹角。在机械臂搬运过程中,机械叉需要保持水平。此时第一腕部关节的轴与水平面始终具有一定的夹角。而第二腕部关节保持与机械臂底座所在平面平行,即第二腕部关节与水平面平行,因此第一腕部关节和第二腕部关节始终具有一定的夹角,从而可以避免第二腕部关节和第一腕部关节平行产生腕部奇异点,防止机械臂的第三腕部关节出现不可预计的运动,从而提高了机械臂的可靠性。
附图说明
图1为现有的一种6自由度机械臂的结构示意图;
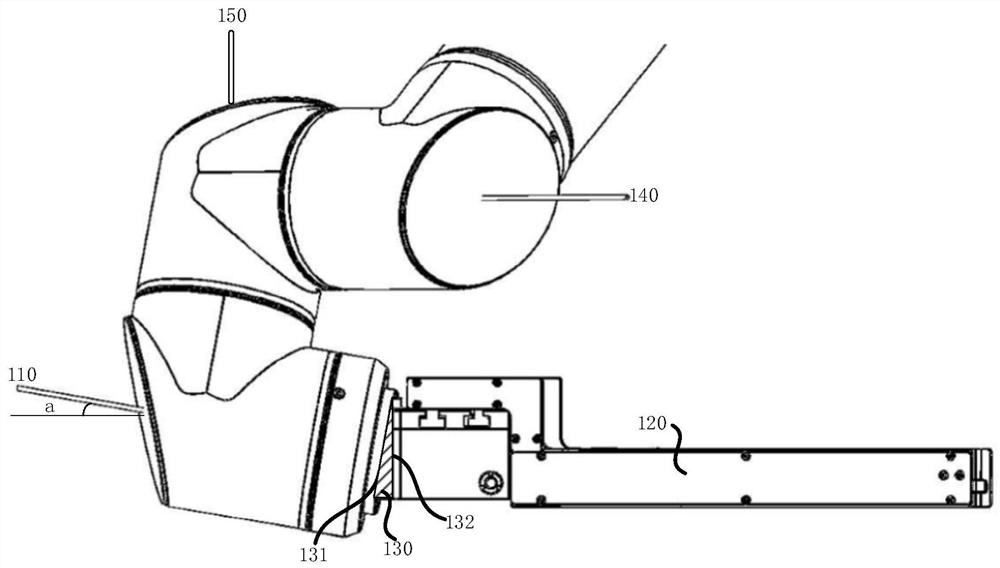
图2为本发明实施例提供的一种机械臂腕部关节的结构示意图;
图3为本发明实施例提供的一种转接块的剖面结构示意图;
图4为本发明实施例提供的一种搬运装置的结构示意图;
图5为本发明实施例提供的一种搬运装置搬运的位置示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
图1为现有的一种6自由度机械臂的结构示意图。如图1所示,该机械臂包括6个轴和机械叉21,分别为第一轴11、第二轴12、第三轴13、第四轴14、第五轴15和第六轴16。第四轴14、第五轴15和第六轴16构成机械臂的腕部关节。机械叉侧装在第六轴16的末端,相对于机械叉垂直安装在第六轴16的末端,机械臂的工作空间比较大。在机械臂工作过程中,为了保证横滚角度和俯仰角度不变,第六轴16保持不变。并且随着第五轴15的旋转,第四轴14和第六轴16发生平行的概率比较大,此时机械臂会产生腕部奇异点,第五轴15会产生速度和姿态的突变,从而导致第六轴16末端姿态不可控(摔片盒)甚至损坏机械臂。
针对上述技术问题,本发明实施例提供了一种机械臂。图2为本发明实施例提供的一种机械臂腕部关节的结构示意图。如图2所示,该机械臂包括第一腕部关节110、机械叉120和转接块130;第一腕部关节110通过转接块130与机械叉120连接,机械叉120所在平面与水平面平行时,第一腕部关节110的轴与机械叉120所在平面成角度设置。
具体地,机械臂还包括第二腕部关节140和第三腕部关节150。当第二腕部关节140和第一腕部关节110平行时,机械臂会产生腕部奇异点。如图2所示,第一腕部关节110的轴与机械叉120所在平面成角度设置,当机械叉120所在平面与水平面平行时,第一腕部关节110的轴与水平面具有一定的夹角a。在机械臂搬运过程中,机械叉120需要保持水平。此时第一腕部关节110的轴与水平面始终具有一定的夹角a。而第二腕部关节140保持与机械臂底座所在平面平行,即第二腕部关节140与水平面平行,因此第一腕部关节110和第二腕部关节140始终具有一定的夹角a,从而可以避免第二腕部关节140和第一腕部关节110平行产生腕部奇异点,防止机械臂的第三腕部关节150出现不可预计的运动,从而提高了机械臂的可靠性。
继续参考图2,转接块130包括第一端面131和第二端面132,第一端面131与第一腕部关节110连接,第二端面132与机械叉120连接,第一端面131与第二端面132相交。
具体地,由图2可知,第一端面131与第一腕部关节110的轴垂直,第二端面132与机械叉120所在平面垂直,当第一端面131与第二端面132相交时,第一腕部关节110的轴与机械叉120所在平面具有一定的夹角a。当机械叉120所在平面与水平面平行时,第一腕部关节110的轴与水平面具有一定的夹角a。从而可以实现第一腕部关节110和第二腕部关节140始终具有一定的夹角a,避免了第二腕部关节140和第一腕部关节110平行产生腕部奇异点,防止机械臂的第三腕部关节150出现不可预计的运动,从而提高了机械臂的可靠性。
需要说明的是,第一腕部关节110和第二腕部关节140的夹角a可以通过转接块130的第一端面131和第二端面132之间的夹角调节。
继续参考图2,转接块130的形状可以为楔形。
具体地,如图2所示,当转接块130为楔形时,转接块130的轴线方向与水平面平行。即机械叉120所在平面与水平面平行时,转接块130的轴线方向与机械叉120所在平面平行。此时形成楔形的两个表面分别第一端面131和第二端面132,从而实现第一腕部关节110和第二腕部关节140始终具有一定的夹角。
需要说明的是,图2仅是示例性地示出了转接块130的一种楔形。在其他实施例中,转接块130还可以有其他楔形。图3为本发明实施例提供的一种转接块的剖面结构示意图。如图3所示,该转接块130的第一端面131和第二端面132具有一定角度,同样可以使机械叉120所在平面与水平面平行时,第一腕部关节110的轴与水平面具有一定的夹角。
可选地,继续参考图2,转接块130通过螺栓与第一腕部关节110和机械叉120连接。螺栓设置于转接块130的第一端面131和第二端面132,转接块130通过螺栓与第一腕部关节110和机械叉120连接,在保证转接块130固定连接的基础上,可以尽量减小转接块130与第一腕部关节110和机械叉120连接时导致的夹角变化,使机械叉120所在平面与水平面平行时,转接块130的轴线方向与机械叉120的角度与第一端面131和第二端面132的角度相等,从而使转接块130的轴线方向与机械叉120的角度容易控制。
可选地,机械叉所在平面与水平面平行时,第一腕部关节的轴与机械叉所在平面的角度为10°。
具体地,机械臂可以用于搬运片盒,当机械臂用于搬运8寸片盒时,存在片盒与水平面存在10°夹角的特殊工况,此时设置第一腕部关节的轴与机械叉所在平面的角度为10°,可以实现机械叉所在平面与片盒平行,从而实现搬运8寸片盒。
可选地,机械臂还包括底座、回旋座、大臂、肘部关节、小臂、第二腕部关节和第三腕部关节,回旋座安装在底座上,大臂安装在回旋座上,肘部关节安装在大臂上,小臂的一端安装在肘部关节上,小臂的另一端与第二腕部关节连接,第三腕部关节安装在第二腕部关节上,第一腕部关节安装在第三腕部关节上。
具体地,机械臂可以为6自由度机械臂。大臂包括第一轴,肘部关节包括第二轴,小臂包括第三轴,第二腕部关节包括第四轴,第三腕部关节包括第五轴,第一腕部关节包括第六轴。6自由度机械臂可以满足三维空间的6个自由度,从而实现机械臂在三维空间的运动。
本发明实施例还提供一种搬运装置。图4为本发明实施例提供的一种搬运装置的结构示意图。如图4所示,该搬运装置包括本发明任意实施例提供的机械臂300,因此具备本发明任意实施例提供的机械臂相同的有益效果,此处不再赘述。
继续参考图4,搬运装置还包括自动导航小车100和架设在自动导航小车100上的运载框架200;机械臂300设置于运载框架200上。还包括设置于运载框架200上的片盒放置机构400,片盒放置机构400所在平面与水平面平行。
具体地,机械臂300的底座通过法兰安装在运载框架200上,使机械臂300与运载框架200的连接位置相对于地面的高度高于片盒存放区顶部相对于地面的高度。机械臂300靠近自动导航小车100的车头或车尾,使得机械臂300只需向一个方向转动就可以使片盒500搬运到片盒放置机构400。片盒放置机构400可以为载盘,用于承载搬运后的片盒500。
在机械臂300的机械叉350叉取片盒500时,机械臂300的回旋座320与底座310垂直。由于机械叉350的安装方式为侧装安装方式,所以机械臂300的机械叉350叉取片盒500时,回旋座320相当于安装在一个侧面上,回旋座320上的大臂330平行于水平面,小臂340垂直于水平面向下,由于机械臂300安装的位置相对于地面比物料顶部相对于地面的高度更高,这样,小臂340垂下,与小臂340连接的机械叉350可以作业于更深或更低的工位的片盒500。机械叉350只需进入低位的片盒存放工位处叉取片盒500回到与片盒放置机构400平行的位置,机械叉350再将片盒500放置在片盒放置机构400上。相比于现有技术的正装安装方式,本实施例工作空间较大,可以满足较深或者较低工位的搬运,并且,本实施例的机械臂300在搬运过程中可以避免机械臂300与自身工位的干涉,不需要浪费机械臂300大量的运动轨迹,增加了搬运的效率。
图5为本发明实施例提供的一种搬运装置搬运的位置示意图。如图5所示,搬运装置与片盒存放区600交接片盒500时,自动导航小车100的车头(即为自动导航小车中设置机械臂300的一侧)面向片盒存放区600,使机械臂300靠近自动片盒存放区600,同时片盒存放区600中的片盒500位于机械臂300的一侧,片盒放置机构400位于机械臂300的另一侧。当自动导航小车100到片盒存放区300叉取片盒500时,自动导航小车100只需向一个方向转动即可将片盒500放置于片盒放置机构400上,相对于片盒放置机构400放在机械臂300前后的位置而机械臂300前后转动才能将片盒500放置于片盒放置机构400上而言,本实施例可以减少一个机械臂300的转动方向,方便找出机械臂300发生腕部奇异点的位置,并且还能减少机械臂300转动的轨迹。
进一步的,机械叉上安装有声呐传感器,用于检测片盒500是否在片盒存放区600。声呐传感器通过声呐检测片盒存放区600上是否有片盒500,如果有片盒500再对片盒500进行叉取,如果没有片盒500则运行至下一个工位。
进一步的,机械叉上还安装有相机,相机用于获取预设位置拍照。自动导航小车100到达预设位置叉取片盒500时,相机会对自动导航小车100达到的位置进行拍照以判断是否达到预设位置。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种用于盾构机舱内刀具搬运的机械臂装置以及搬运方法
- 具有食品搬运机械臂的搬运机器人