运动平台、放疗床及医疗设备
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及医疗器械技术领域,尤其涉及一种运动平台、放疗床及医疗设备。
背景技术
在放射治疗过程中,需要对放疗对象的肿瘤位置进行精确定位。目前通常通过移动放疗床来对放疗对象的肿瘤位置进行精确定位。因此,需要在放疗床中的设置运动平台,通过移动平台带动放疗床运动,然而,目前的移动平台运动精度不高,导致难以实现肿瘤位置的精确定位。
发明内容
本发明的目的在于提供一种运动平台,已解决现有的移动平台运动精度低的问题。
为了达到上述目的,本发明提供了一种运动平台,包括:
移动板、底板及设置于所述底板上的支点机构及至少两个驱动机构;
所述移动板的底面至少具有三个不共线的支撑点,所述支点机构及每个所述驱动机构分别位于一个所述支撑点并与所述移动板连接;
所述驱动机构独立驱动其对应的所述支撑点移动时,所述移动板产生倾斜,所述支点机构在所述移动板的倾斜方向上为所述移动板提供旋转自由度。
可选的,所述驱动机构包括旋转驱动单元及动力转换单元,所述动力转换单元将所述旋转驱动单元的旋转运动转换为对应的支撑点的移动。
可选的,所述动力转换单元为摇杆,所述摇杆的一端与所述旋转电机的输出端转动连接,另一端与所述移动板转动连接。
可选的,所述动力转换单元还包括减速机,所述减速机设置于所述旋转电机的输出端,所述摇杆通过所述减速机与所述旋转电机的输出端连接。
可选的,所述摇杆的两端均设置有关节轴承,所述摇杆的两端分别通过对应的所述关节轴承与所述输出端及所述移动板转动连接。
可选的,所述驱动机构为直线驱动单元。
可选的,所述驱动机构与对应的所述支撑点的连接位置设置有隆起部。
可选的,所述支点机构包括第一旋转单元及第二旋转单元,所述第二旋转单元的旋转轴与所述第二旋转单元的旋转轴垂直且保持相对位置不变,所述第一旋转单元与所述底板连接,所述第二旋转单元与所述移动板连接,所述移动板通过所述第一旋转单元或所述第二旋转单元转动。
可选的,所述第一旋转单元包括第一转轴及第一轴承座,所述第一轴承座用于将所述第一转轴与所述底板连接;
所述第二旋转单元包括第二转轴及第二轴承座,所述第二轴承座用于将所述第二转轴与所述移动板连接;
所述支点机构还包括固定座,所述第一转轴与所述第二转轴均套设于所述固定座上,且所述第一转轴与所述第二转轴的轴线相交。
此外,本发明还提供了一种放疗床,包括:
如所述的运动平台,所述运动平台的移动板用于固定并承载所述放疗床,以驱动所述放疗床移动。
此外,本发明还提供了一种医疗设备,包括:
放疗床;
如所述的运动平台,所述运动平台的移动板用于固定并承载所述放疗床,以驱动所述放疗床移动。
此外,本发明还提供了一种放疗床,包括:床板及运动平台;所述床板在X方向和Y方向延伸;所述运动平台包括:移动板、底板、支点机构和两个驱动机构;所述床板被所述移动板支撑,所述支点机构及两个驱动机构设置于所述底板上;所述支点机构及所述两个驱动机构分别与所述移动板连接;所述两个驱动机构沿Y方向间隔设置;所述两个驱动机构与所述支点结构在X方向上间隔布置;所述两个驱动机构中的一个或两个可驱动所述移动板相对于Y轴或X轴倾斜,所述支点机构在所述移动板的倾斜方向上为所述移动板提供旋转自由度。
在本发明提供的运动平台中,在移动板的底面设置至少具有三个不共线的支撑点,支点机构及每个驱动机构分别位于一个所述支撑点并与所述移动板连接,当所述驱动机构独立驱动其对应的所述支撑点移动时,所述移动板产生倾斜,由于所述支点机构仅在所述移动板的倾斜方向上为所述移动板提供旋转自由度,限制了其他方向上的旋转自由度,因此可以提高运动平台的移动精度。
附图说明
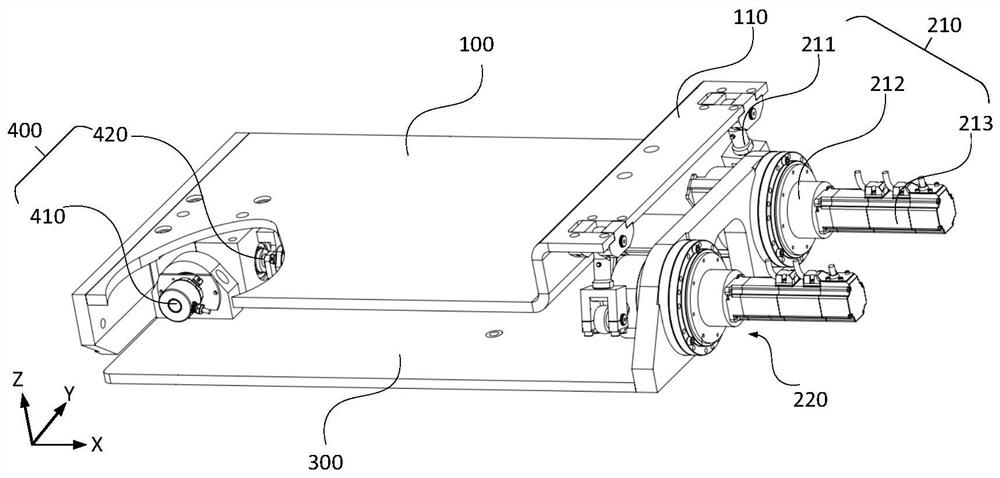
图1为本发明实施例中的运动平台的示意图;
图2A为本发明实施例中的运动平台的第一状态的正视图;
图2B为本发明实施例中的运动平台的第一状态的侧视图;
图3A为本发明实施例中的运动平台的第二状态的正视图;
图3B为本发明实施例中的运动平台的第二状态的侧视图;
图4A为本发明实施例中的运动平台的第三状态的正视图;
图4B为本发明实施例中的运动平台的第三状态的侧视图;
图5为本发明实施例中的支点机构的示意图;
其中,附图标记如下:
100-移动板;110-隆起部;
210-第一驱动机构;211-摇杆;212-减速机;213-旋转电机;220-第二驱动机构;
300-底板;
400-支点机构;410-第一转轴;420-第一转轴;430-固定座;440-第二转轴。
具体实施方式
下面将结合示意图对本发明的具体实施方式进行更详细的描述。根据下列描述,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
图1为本实施例中的运动平台的示意图。如图1所示,所述运动平台包括移动板100、底板300、支点机构400和至少两个驱动机构。其中,所述支点机构400设置于所述底板300上,所述驱动机构也设置于所述底板300上。所述移动板100的底面至少具有三个不共线的支撑点,所述支点机构400及每个所述驱动机构分别位于一个所述支撑点并与所述移动板100连接。所述驱动机构独立驱动其对应的所述支撑点移动时,所述移动板100产生倾斜,所述支点机构400仅在所述移动板100的倾斜方向上为所述移动板100提供旋转自由度。具体实施时,所述移动板100的倾斜方向包括绕X轴的倾斜,以及绕Y轴的倾斜。
图2A为本实施例中的运动平台的第一状态的正视图,图2B为本实施例中的运动平台的第一状态的侧视图。如图2A和图2B所示,本实施例中,所述运动平台包括两个驱动机构,分别为第一驱动机构210和第二驱动机构220,所述第一驱动机构210和所述第二驱动机构220用于驱动移动板100,以使所述移动板100绕所述支点机构400转动。所述第一驱动机构210和所述第二驱动机构220对应的支撑点在X轴和Z轴上的位置均相同。在本实施例中,所述第一驱动机构210和所述第二驱动机构220对应的支撑点位于所述移动板100的一侧,所述支点机构400对应的支撑点位于所述边缘的另一侧。
所述支点机构400与所述第一驱动机构210和所述第二驱动机构220之间在X轴上的距离可以根据受力需要和移动板100所需要的倾斜角度进行调整。所述支点机构400与所述第一驱动机构210和所述第二驱动机构220之间在X轴上的距离越大,则所述第一驱动机构210或所述第二驱动机构220在相同的驱动力的作用下,所述移动板100可以承受更大的负载。所述支点机构400与所述第一驱动机构210和所述第二驱动机构220之间在X轴上的距离越小,则所述第一驱动机构210或所述第二驱动机构220输出相同的驱动行程时,所述移动板100具有更大的倾斜角度。
图3A为本实施例中的运动平台的第二状态的正视图,图3B为本实施例中的运动平台的第二状态的侧视图。如图3A和图3B所示,所述第一驱动机构210和所述第二驱动机构220在相同的驱动行程下驱动对应的支撑点沿Z向移动,所述支点机构400仅在Y轴方向上提供旋转自由度,限制其余方向的旋转自由度,所述移动板100仅可以绕Y轴旋转,从而所述移动板100沿Y轴倾斜时,可以防止所述移动板100在其他方向上产生位移,导致运动平台精度下降。
图4A为本实施例中的运动平台的第三状态的正视图,图4B为本实施例中的运动平台的第三状态的侧视图。如图4A和图4B所示,所述第一驱动机构210对所述移动板100的驱动行程大于或者小于所述第二驱动机构220对所述移动板100的驱动行程,所述支点机构400仅在X轴方向上提供旋转自由度,限制其余方向的旋转自由度,所述移动板100仅可绕X轴旋转,从而所述移动板100沿X轴倾斜时,可以防止所述移动板100在其他方向上产生位移,导致运动平台精度下降。
进一步的,所述第一驱动机构210和所述第二驱动机构220均包括旋转驱动单元及动力转换单元,所述动力转换单元将所述旋转驱动单元的旋转运动转换为对应的支撑点的垂向运动。
请继续参阅图2,旋转驱动单元能够提供绕X轴旋转的运动,通过动力转换单元,可以将绕X轴旋转的运动转换为沿Z轴方向的直线运动。下面以第一驱动机构210为例进行解释说明。
在第一驱动机构210中,所述旋转驱动单元为旋转电机213,所述动力转换单元为摇杆211,所述摇杆211的一端与所述旋转电机213的输出端转动连接,另一端与所述移动板100转动连接。如此,当所述旋转电机213绕X轴旋转时,便会带动所述摇杆211在Z轴方向移动,进而带动所述第一驱动机构210对应的支撑点沿Z轴移动。
本实施例中,所述动力转换单元还包括减速机212,所述减速机212设置于所述旋转电机213的输出端,所述摇杆211通过所述减速机212与所述输出端连接。所述减速机212是设置在所述旋转电机213和所述摇杆211之间传动装置,用来降低旋转电机213输出端的转速。进一步地,所述减速机212还可以增大所述输出端的转矩,使得所述第一驱动机构210具有更大转矩,由此增加所述移动板100的负载能力。同时,通过增大所述减速机212的换转比,可以减小所述旋转电机213的输出端的机械误差。有利于提升所述第一驱动机构210的行程精度,进而提升运动平台的移动精度。
所述摇杆211的两端均设置有关节轴承,所述摇杆211的两端分别通过对应的所述关节轴承与所述输出端及所述移动板100转动连接。所述关节轴承为球面滑动轴承,其滑动接触表面是一个内球面和一个外球面,运动时可以在任意角度旋转摆动,其表面可以通过磷化、炸口、镶垫、喷涂等多种特殊工艺处理方法制作而成。所述关节轴承具有载荷能力大,抗冲击,抗腐蚀、耐磨损、自调心、润滑好的特点,有利于进一步提升所述运动平台的负载能力和移动精度。
作为可选实施例,所述第一驱动机构210和所述第二驱动机构220还可以均为直线驱动单元。所述直线驱动单元例如直线电机,所述直线电机的输出端直接与对应的支撑点连接。所述直线电机沿Z轴设置,可以直接驱动对应的支撑点沿Z轴移动。所述直线驱动单元可以是电动推杆、液压缸、电缸、螺旋升降机或者气杆,在此不做过多限定。
进一步的,所述第一驱动机构210和所述第二驱动机构220与对应的所述支撑点之间均设置有隆起部110。应知道。所述隆起部110可使得第一驱动机构210和所述第二驱动机构220被隐藏设置在所述隆起部110中,使得所述底板300与所述移动板100在起始位置保持平行的状态。
图5为本实施例中的支点机构400的示意图。如图5所示,所述支点机构400包括第一旋转单元及第二旋转单元,所述第二旋转单元的旋转轴与所述第二旋转单元的旋转轴垂直且保持相对位置不变,所述第一旋转单元与所述底板300连接,所述第二旋转单元与所述移动板100连接,所述移动板100通过所述第一旋转单元或所述第二旋转单元转动。
进一步的,所述第一旋转单元包括第一转轴410及第一轴承座420,所述第一轴承座420用于将所述第一转轴410与所述底板300连接。所述第二旋转单元包括第二转轴440及第二轴承座(图中未示出),所述第二轴承座(图中未示出)用于将所述第二转轴440与所述移动板100连接。所述支点机构400还包括固定座430,所述第一转轴410与所述第二转轴440均套设于所述固定座430上,且所述第一转轴410与所述第二转轴440的轴线相交。进一步的,所述第一转轴410与所述第二转轴440是一体的。
相应的,本发明还提供了一种放疗床,包括:运动平台,所述运动平台的移动板100用于固定并承载所述放疗床,以驱动所述放疗床移动。
可选的,在本发明提供的另一种放疗床中,所述放疗床包括床板及运动平台,其中,所述床板在X方向和Y方向延伸;所述运动平台包括:移动板100、底板300、支点机构400、第一驱动机构210和第二驱动机构220;所述床板被所述移动板100支撑,所述支点机构400、第一驱动机构210和第二驱动机构220设置于所述底板300上;所述支点机构400、第一驱动机构210和第二驱动机构220分别与所述移动板100连接;所述第一驱动机构210和第二驱动机构220沿Y方向间隔设置;所述第一驱动机构210和第二驱动机构220与所述支点结构400在X方向上间隔布置;所述第一驱动机构210和第二驱动机构220中的一个或两个可驱动所述移动板100相对于Y轴或X轴倾斜,所述支点机构400在所述移动板100的倾斜方向上为所述移动板100提供旋转自由度。
此外,本发明还提供了一种医疗设备,所述医疗设备包括放疗床和运动平台,其中,所述运动平台的移动板100用于固定并承载所述放疗床,以驱动所述放疗床移动。放疗对象位于躺在所述放疗床上,所述运动平台带动所述放疗床移动,以调整所述放疗对象的位置,使得需要放疗对象的肿瘤位置与放射源对准,启动所述放射源,即可对所述放疗对象的肿瘤位置实施放疗。
综上所述,在本实施例提供的运动平台中,所述运动平台包括移动板、底板、支点机构及至少两个驱动机构。所述支点机构和驱动机构设置于所述底板上,所述移动板的底面至少具有三个不共线的支撑点,所述支点机构及每个所述驱动机构分别位于一个所述支撑点并与所述移动板连接;所述驱动机构独立驱动其对应的所述支撑点沿垂向移动时,所述移动板产生倾斜,所述支点机构仅在所述移动板的倾斜方向上为所述移动板提供旋转自由度。本发明的运动平台能够实现两个旋转自由度。此外,第一旋转单元包括第一转轴及第一轴承座,所述第一轴承座用于将所述第一转轴与所述底板连接。第二旋转单元包括第二转轴及第二轴承座,所述第二轴承座用于将所述第二转轴与所述移动板连接。支点机构还包括固定座,所述第一转轴与所述第二转轴均套设于所述固定座上,且所述第一转轴与所述第二转轴的轴线相交。由于第一转轴或第二转轴转动的限制作业,能够防止移动板在转动时出现其他方向的转动,有利于提升移动板旋转的精度。
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
- 运动平台、放疗床及医疗设备
- 用于4D放疗计划验证的呼吸运动平台