一种基于重合行程的无人配送车编队信息共享的信息场景构建方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明属于交通信息获取和物流自动化领域,尤其涉及一种基于重合行程的无人配送车编队信息共享的信息场景构建方法。
背景技术
无人配送车在配过程中,配送调度系统安排在配路径局部重合车辆在重合行程中编队行驶,则可以在行程中形成信息共享体。
然而,当采用上述方式构建信息场景时,一方面,无人配送车个体探测到的局部道路信息相对匮乏,导致无人配送车个体获得的行驶环境信息并不全面,使其可能对道路条件出现错误判断;另一方面,无人配送车行驶过程中可能发生被损坏等意外情况,没有应对此类情形的预防措施。
发明内容
本发明要解决的一种技术问题是基于重合行程的无人配送车编队信息共享的信息场景构建方法。
根据本发明一方面,提出一种基于重合行程的无人配送车编队信息共享的信息场景构建方法,包括:利用无人配送车的车载卫星导航、通信等设备获取区域内无人配送车辆信息;对配送车视距视野范围内无人配送车辆进行编队调度预设行驶轨迹,编队行驶节约能源;将编队内车辆间互为远景摄像机,作为安全监控,共享探测到的道路信息,上传到调度信息中心;基于多源信息的共享,构建全方位立体行驶环境场景,发至相关配送车。
进一步地,区域内无人配送车信息包括:获取区域内运行无人配送车辆列表、车辆行驶信息、车辆状态信息;根据配送车的车载摄像头视距视野确定可监控范围内的配送车群体,获取该群体的相关信息,为编队行驶的依据。
进一步地,无人配送车辆行驶信息还包括:获取无人配送车辆摄像头传回的信息,监控视野范围内的配送车安全;基于获取的配送车群体的状态信息与静态交通信息合成虚拟交通场景。其中,静态交通信息主要包括:城市基础地理信息、城市道路网基础信息、交通设施信息及交通管理等信息。
进一步地,对配送车视距视野范围内无人配送车辆进行编队调度预设行驶轨迹,编队行驶节约能源包括:根据配送调度安排,预设配送车的行驶路线和行驶时间,对符合条件车辆进行编队行驶;配送车在重合行程进行集聚编队行驶,形成信息共享体。基于调度中心的编队算法编队行驶,保持最佳编队距离减小风阻、减小其他横向的行车干扰。当编队内车辆距离过大或过小时,自主进行调节,减少行驶过程中的能耗,提高配送效率。
进一步地,将编队内车辆间互为远景摄像机,作为安全监控,共享探测到的道路信息,上传到调度信息中心包括:获取编队内无人配送车辆各自行驶过程实时传回的视频或者录像资料;获取无人配送车辆编队中其他车辆视野盲区图像信息;获取编队内无人配送车辆各自探测到的道路信息;基于互相提供的监控视频信息发现、警示蓄意破坏者,发生破坏情况可以根据实时传回的视频或者录像资料查找肇事者;基于获取的互为远景摄像机共享探测到的道路信息,后车得到前车提供更前方的交通场景,得到前车提供的第三方场景信息,避免因遮挡而造成的视觉盲区。
进一步地,基于多源信息的共享,构建全方位立体行驶环境场景,发至相关配送车包括:获取无人配送车传回的车速、位置、影像信息;基于无人配送车传回的车速、位置、影像等资料分析和多源视角的不同,定位无人配送车在虚拟场景的位置和变化,感知道路不同的信息特征,与其他道路等静态信息合成全方位、立体的虚拟行驶的虚拟场景,通过共享各自的信息感知,互为视景监控信息,信息互补,扩展信息获取模式,提高信息感知精度和准确度,提高配送车的安全性。
通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
图1为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的一个实例的流程示意图。
图2为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的另一个实例的流程示意图。
图3为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的一个实例的结构示意图。
图4为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的另一个实例的结构示意图。
具体实施方式
现在将参照附图来详细描述本发明的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图对本发明进一步详细说明。
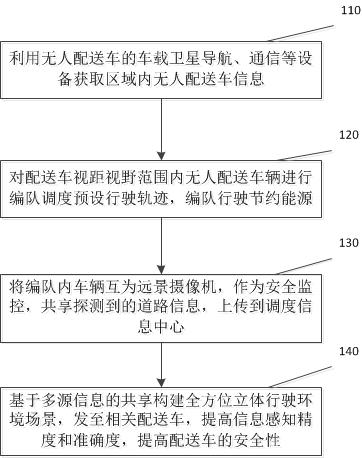
图1为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的一个实例的流程示意图,该方法包括以下步骤。
在步骤110,利用无人配送车的车载卫星定位导航系统、通信系统等设备获取区域内无人配送车辆信息。其中,区域内无人配送车信息包括:获取区域内运行无人配送车辆列表、车辆行驶信息、车辆状态信息;根据配送车的车载摄像头视距视野确定可监控范围内的配送车群体,获取该群体的相关信息,为编队行驶的依据。车辆状态信息包括卫星定位的位置、速度以及摄像头传回的信息,与静态交通信息合成虚拟交通场景。
在步骤120,对配送车视距视野范围内无人配送车辆进行编队调度预设行驶轨迹,编队行驶节约能源。即无人配送车根据调度进行配送过程中,根据配送调度安排,与其他配送车如果线路、时间接近,在配送行驶中则可能存在局部路径重合的情形,配送车在重合行程进行集聚编队行驶,形成信息共享体,此时基于调度中心的编队算法对满足编队条件的车辆进行编队处理,保持最佳编队距离减小风阻、减小其他横向的行车干扰,当编队内车辆距离过大或过小时,自主进行调节,减少行驶过程中的能耗,提高配送效率。其中,车辆编队行驶能降低车辆空气阻力,降低油耗,提高车队运行效率;有效解决车辆调度问题,提升运行效率,节约成本;减少拥堵,提升道路车辆密度,改善道路通行能力,减少交通事故,提高安全性。编队行驶过程中,车辆间距越小,能耗就越小。
在步骤130,将编队内车辆间互为远景摄像机,作为安全监控,共享探测到的道路信息,上传到调度信息中心。即配送调度安排车辆同时出发或者在重合行程点进行集聚编队行驶形成的信息共享体,一是共享在途的配送系统上传的交通信息,生成虚拟交通场景;二是共享编队配送车共享各自配备的传感器检测的道路信息,扩展信息采集模式和传感器数量;三是编队配送车相互提供视频监控,发现、警示蓄意破坏者,发生破坏情况可以根据实时传回的视频或者录像资料查找肇事者。编队配送车互为远景摄像机,其视野相对宽广,前车为后车提供更前方的交通场景,为后者提供第三方场景信息,弥补自身摄像头因角度、视角等盲区或者失真等情形,避免因遮挡而造成的视觉盲区。
在步骤140,基于多源信息的共享,构建全方位立体行驶环境场景,发至相关配送车。无人配送车辆互为远景摄像机能够收集多源信息,多源信息由于视角不同,感知的信息特征不同,综合卫星定位导航系统传回的无人配送车的车速、位置、影像等资料分析,定位无人配送车辆在虚拟场景的位置和变化,与其他道路等静态信息合成虚拟行驶的全方位、立体的虚拟交通场景,提高信息感知精度和准确度,提高配送车的安全性。
图2为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的另一个实例的流程示意图,该方法包括以下步骤。
在步骤201,利用无人配送车的车载卫星导航、通信等设备获取区域内无人配送车信息。其中,区域内无人配送车信息包括:获取区域内运行无人配送车辆列表、车辆行驶信息、车辆状态信息,根据配送车的车载摄像头视距视野确定可监控范围内的配送车群体,获取该群体的相关信息,为编队行驶的依据。车辆行驶信息还包括:获取无人配送车辆摄像头传回的信息,监控视野范围内的配送车安全;基于获取的配送车群体的状态信息与静态交通信息合成虚拟交通场景。其中,静态交通信息主要包括:城市基础地理信息、城市道路网基础信息、交通设施信息及交通管理等信息。
在步骤202,排除异常状态车辆。即车辆列表中排除掉故障状态或偏移路线状态等异常状态的无人配送车辆,仅包含区域内处于正常状态无人配送车辆。
在步骤203,刷新系统,即根据无人配送车辆利用摄像头传回的信息,车载卫星导航、通信等设备实时反馈的无人配送车辆位置、速度等动态信息,结合静态交通信息更新合成实时全方位立体虚拟交通场景。
在步骤204,检测范围内是否有正常行驶的无人配送车辆,如果有,则执行步骤205,否则直接执行步骤210。
在步骤205,获取范围内无人配送车辆预设行驶轨迹。无人配送车辆根据调度进行配过程中,与其他配送车如果线路、时间接近,在配送行驶中则可能存在局部路径重合的情形,通过各车辆预设行驶轨迹信息检测是否存在局部路径重合。
在步骤206,判断车辆是否可编队行驶。若与范围内正常行驶的其他无人配送车辆有重合路径,且选择编队行驶利大于弊,则执行步骤207,否则执行步骤210。
在步骤207,车辆基于调度中心的编队算法编队行驶。根据配送调度安排,预设配送车的行驶路线和行驶时间,对符合条件车辆进行基于调度中心的编队算法的编队行驶,保持最佳编队距离减小风阻、减小其他横向的行车干扰。当编队内车辆距离过大或过小时,自主进行调节,减少行驶过程中的能耗,提高配送效率。如果配送调度安排车辆同时出发或者在重合行程点进行集聚编队行驶,还可以形成信息共享体。
在步骤208,编队内车辆间互为远景摄像机共享探测到的道路信息。作为互为远景摄像机,其视野相对宽广,前车为后车提供更前方的交通场景,为后者提供第三方场景信息,避免因遮挡而造成的视觉盲区。而且多源信息的视角不同,感知的信息特征不同,可以形成全方位、立体的行驶环境场景,准确的判断行进路线的道路条件,预防发生危险情况,提高配送安全性。
在步骤209,编队内车辆相互提供监控视频,发现、警示蓄意破坏者,发生破坏情况可以根据实时传回的视频或者录像资料查找肇事者。监控视频存储在云空间内,方便实时调用和查找资料。
在步骤210,信息反馈给系统,即将探测到的动态信息和静态信息实时反馈给系统,通过编队车辆间互为视景监控信息,信息互补扩展信息获取模式,达到多源信息的集中和共享。
在步骤211,基于多源信息的共享,构建全方位立体行驶环境场景,发至相关配送车。基于无人配送车传回的车速、位置、影像等资料分析和多源视角的不同,定位无人配送车在虚拟场景的位置和变化,感知道路不同的信息特征,与其他道路等静态信息合成全方位、立体的虚拟行驶的虚拟场景,提高信息感知精度和准确度,提高配送车的安全性。
在步骤212,判断行进路线上是否有危险路况或发生危险情况,若有,则执行步骤213,若没有,则执行步骤215。
在步骤213,发出示警。即对相应危险路况或危险情况发出相应警示,提醒范围内人员。
在步骤214,基于调度中心的路径优化算法重新规划无人配送车行进路线。即通过系统对实时路况的收集和判断,基于调度中心的路径优化算法重新规划适应于当前场景的最优行驶路线,达到避开危险路况或危险情况的目的。
在步骤215,无人配送车继续行驶。即在基于蚁群算法的优化算法得出的最短路径上行驶。
在步骤216,收集实时道路信息。即在无人配送车行驶过程中,不断收集道路信息并反馈给系统,系统将收集到的信息不断整合、分析和处理,更新构建好的虚拟道路场景。
图3为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的一个实例的结构示意图。
信息采集结构310,包括无人配送车辆装配的摄像头、传感器、车载卫星导航定位系统、通信系统,不断收集区域内无人配送车辆行驶过程中的道路信息和车辆信息。
数据传输结构320,将在途的编队配送车信息采集结构获得的道路信息、车辆信息等转化为数据上传给系统,同时,也将系统的决策信息传输给各个无人配送车。其中,系统包括调度系统,虚拟道路场景系统,通过将信息传送给这些系统,不断优化无人配送车辆调度决策,不断完善全方位立体化的虚拟道路场景,扩展信息采集模式。
虚拟交通场景结构330,根据无人配送车传回的车速、位置、影像等资料分析,定位无人配送车在虚拟场景的位置和变化,基于多源信息的共享与其他道路等静态信息合成全方位虚拟行驶的虚拟场景,更加准确的判断行进路线的道路条件,有利于调度系统基于实际道路情况进行决策,提高信息感知精度和准确度,预防发生危险情况,提高配送安全性。
图4为本发明基于重合行程的无人配送车编队信息共享的信息场景构建方法的又一个实例的结构示意图,该系统包括:传感器、摄像头、云存储单元、GPS单元、通信单元、数据传输单元、示警单元、虚拟道路场景单元,其中。
传感器单元410用于采集道路信息和检测编队车辆的间距大小。对于道路信息:当传感器检测到道路出现维修标志或其他阻碍前行路线的障碍物或突发情况阻止前行的人、车、物时,将障碍信息反馈给系统,系统重新规划路径;对于间距:当传感器检测到编队车辆间距过大或过小或路线偏移时,利用调度中心的编队算法调整无人配送车辆间距和无人配送车辆位置,保持最佳编队距离减小风阻、减小其他横向的行车干扰,保证车辆安全有序行驶,其中编队车辆间距越小,行驶过程中的能源损失越小,道路利用率越高,效益越大。
摄像头420用于获取探测到的道路图像信息。单个无人配送车辆上不止一个方位的摄像头,这样不仅可以看到行驶方向上的景象,也可以看到行驶方向外的景象。例如,单个无人配送车辆上有前摄像头和后摄像头,在无人车辆编队行驶过程中,两个摄像头同时工作,可以获取单个车辆行驶方向前方和后方两个方向的场景,编队内无人驾驶车辆的前、后摄像头互为远景摄像机共享探测到的道路信息,后车得到前车提供更前方的交通场景,得到前车提供的第三方场景信息,避免因遮挡而造成的视觉盲区。
GPS单元430用于获取卫星定位的无人配送车辆的位置信息,获取卫星定位的无人配送车辆的速度信息,获取卫星探测到的无人配送车辆行驶过程中的时间数据,便于系统基于获取的车辆状态信息与静态交通信息合成虚拟交通场景。
数据传输单元440用于传输系统提供的区域内运行无人配送车辆信息给无人配送车辆,以及接将通过传感器单元、摄像头、GPS单元等在无人配送车辆行进过程中采集到的道路信息、车辆信息等传输给系统,方便系统决策和优化调度及构建虚拟交通场景。
通信单元450用于将各个无人配送车辆采集的道路信息进行共享,实现车-车通信,达到互为视景监控信息,信息互补扩展信息获取模式的目的。
虚拟道路场景单元460用于基于获取传感器单元、摄像头、GPS单元采集到的无人配送车辆信息和道路信息,整合采集到的动态交通信息和静态交通信息,通过多源信息的共享,构建全方位虚拟行驶场景,准确的判断行进路线的道路条件,预防发生危险情况,优化调度管理,提高配送安全性。
云存储单元470用于存储行驶过程中的监控、视频等车辆信息,记录车辆运行状态数据,方便后期对车辆运行数据的查看分析和处理、搜索录像资料。
示警单元480用于在发生危险路况或危险情况时发出示警,达到提醒来往路人、车辆注意避险或警示蓄意破坏者的作用。
至此,已经详细描述了本发明。为了避免遮蔽本发明的构思,没有描述本领域所公知的一些细节,本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
可能以许多方式来实现本发明的方法以及装置。例如,可通过软件、硬件、固件或者软件、硬件、固件的任何组合来实现本发明的方法以及装置。用于所述方法的步骤的上述顺序仅是为了进行说明,本发明的方法的步骤不限于以上具体描述的顺序,除非以其它方式特别说明。此外,在一些实施例中,还可将本发明实施为记录在记录介质中的程序,这些程序包括用于实现根据本发明的方法的机器可读指令。因而,本发明还覆盖存储用于执行根据本发明的方法的程序的记录介质。
虽然已经通过示例对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
- 一种基于重合行程的无人配送车编队信息共享的信息场景构建方法
- 一种基于车辆信息共享的无人驾驶车信息优化系统和方法