一种显微镜以及智能化显微镜系统
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及显微镜技术领域,特别是涉及一种显微镜以及智能化显微镜系统。
背景技术
显微镜是由一个透镜或几个透镜的组合构成的主要用于放大微小物体成为人的肉眼所能看到的光学仪器。传统光学显微镜需要手动调整视野、手动调焦,市面上也有一些全自动显微镜,可以实现载物台XYZ三轴控制及光源明亮度的自动调节,并通过软件实现全景自动扫描、自动拼图、自动回位、同步浏览、远程遥控等全自动化功能,以达到提高工作效率目的的光电算一体化的高科技产品,不过基本都是基于传统显微镜的改造,同时价格也比传统显微镜更高。
发明内容
本发明的目的在于提供一种显微镜以及智能化显微镜系统,能够自动调节视野和自动调焦,提高调节速度和精度。
为解决上述技术问题,本发明采用的一个技术方案是:提供一种显微镜,包括底壳、上壳、电动载物机构、光路机构和下位机,所述上壳位于底壳上,所述上壳和底壳均为中空结构且相互连通,所述底壳的上表面开设有窗口,所述电动载物机构位于底壳内,能够搭载玻片并在X轴和Y轴平面内移动,所述光路机构包括摄像头、镜筒、物镜、Z轴电机和光源,所述镜筒沿Z轴设置并位于窗口上方,所述光源位于底壳的底部,所述摄像头位于镜筒的顶端,所述物镜位于镜筒的底端,所述摄像头、镜筒、物镜、玻片和光源组成光路,所述Z轴电机和下位机位于上壳内,所述Z轴电机用于驱动镜筒沿Z轴移动,所述下位机用于控制电动载物机构移动、控制Z轴电机转动以及控制摄像头拍摄显微照片。
优选的,所述电动载物机构包括Y轴电机、X轴电机、导轨滑台、载物台、电机联接件、滑动联接件、第一滑杆、第二滑杆和丝杆,所述导轨滑台上滑动连接有滑块,所述Y轴电机固定在导轨滑台上以驱动滑块沿第一方向滑动,所述电机联接件固定在滑块上,所述第一滑杆相对导轨滑台固定并沿第一方向设置,所述滑动联接件滑动连接在第一滑杆上,所述第二滑杆的两端分别与电机联接件和滑动联接件固定,所述丝杆与第二滑杆相互平行并沿与第一方向垂直的第二方向设置,所述X轴电机固定在电机联接件上并联接丝杆的一端以驱动丝杆转动,所述丝杆的另一端与滑动联接件转动连接,所述第二滑杆和丝杆均穿过载物台,所述第二滑杆与载物台滑动连接,所述丝杆与载物台螺纹连接,所述载物台用于搭载玻片,所述下位机用于控制Y轴电机和X轴电机转动。
优选的,所述电动载物机构还包括两个固定座,所述两个固定座分别位于第一滑杆两端并与第一滑杆两端固定连接。
优选的,所述固定座沿Z轴方向开设有三个螺孔,每一个固定座设有三颗螺钉,其中,两个螺钉从底壳的底部穿过后再与固定座的两个螺孔螺纹连接,另一颗螺钉与固定座的另一个螺孔螺纹连接后再穿过底壳的底部。
优选的,所述电机联接件的底端设有安装支架,所述安装支架位于滑块与导轨滑台之间,并靠近导轨滑台的端部,所述安装支架上设有第一限位开关。
优选的,所述电机联接件面向载物台的一侧设有安装孔,所述安装孔内设有第二限位开关。
优选的,所述电机联接件上设有电机容纳槽,所述第二电机固定在电机容纳槽内。
为解决上述技术问题,本发明采用的另一个技术方案是:提供一种智能化显微镜系统,包括客户端、服务端、用户终端和前述任一种所述的显微镜,所述下位机与客户端无线连接或有线连接,所述客户端与服务端远程连接,所述服务端与用户端远程连接,所述下位机用于控制电动载物机构将玻片移动至窗口、控制Z轴电机转动完成调焦,以及控制摄像头进行扫描获得显微照片,并上传至服务端;
所述服务端用于对显微照片进行人工智能识别得到人工智能分析结果,并推送给专家系统进行人为认证得到人为认证分析结果,以及结合人工智能分析结果和人为认证分析结果生成结论报告,将结论报告下发至用户终端。
优选的,所述下位机控制Z轴电机转动完成调焦的具体步骤包括:
S1:控制Z轴电机驱动镜筒到达调焦起始位置,并将预设初始步长作为当前步长;
S2:控制Z轴电机驱动镜筒以当前步长向下步进移动,在每次移动后控制摄像头捕捉图像并计算图像清晰度,直至镜筒到达极限调焦位置为止,其中,所述极限调焦位置在调焦起始位置下方;
S3:选取图像清晰度最大时镜筒所在位置作为基准位置;
S4:判断当前步长是否小于预设阈值,在小于预设阈值时,进行步骤S5,在不小于预设阈值时,进行步骤S6;
S5:控制Z轴电机驱动镜筒到达基准位置,并结束调焦;
S6:控制Z轴电机驱动镜筒到达基准位置上方距离基准位置当前步长的位置;
S7:将当前步长的一半代替当前步长;
S8:控制Z轴电机驱动镜筒以当前步长向下步进移动;
S9:在镜筒移动后控制摄像头捕捉图像并计算图像清晰度;
S10:判断图像清晰度是否大于镜筒上一次位置的图像清晰度,如果不大于镜筒上一次位置的图像清晰度,则将镜筒的上一次位置作为基准位置,并再次进行步骤S4,如果大于镜筒上一次位置的图像清晰度,则再次进行步骤S8。
优选的,图像清晰度通过边缘检测Laplacian算子或Roberts梯度函数计算得到。
区别于现有技术的情况,本发明的有益效果是:
1、结构更加紧凑,减小显微镜的体积,使显微镜具有一定的便携性。
2、镜筒和载物台依靠电机自动调节,使显微镜能进行自动移动、对焦、扫描和拼接等操作。
3、通过设置服务端,显微照片会汇总到服务端,人工智能识别等复杂的运算位于服务端,可以降低成本。
4、服务端能够进行人工智能识别,可以提高智能化。
附图说明
图1是本发明实施例的显微镜的主视示意图。
图2是本发明实施例的显微镜的左视示意图。
图3是本发明实施例的显微镜的俯视示意图。
图4是本发明实施例的显微镜的轴测示意图。
图5是本发明实施例的显微镜的拆解示意图。
图6是本发明实施例的显微镜的光路结构的主视示意图。
图7是本发明实施例的显微镜的光路结构的透视示意图。
图8是本发明实施例的显微镜的电动载物机构的主视示意图。
图9是本发明实施例的显微镜的电动载物机构的俯视示意图。
图10是本发明实施例的显微镜的电动载物机构的轴测示意图。
图11是本发明实施例的显微镜的电动载物机构的部分分解结构示意图。
图12是本发明实施例的显微镜的电动载物机构的电机联接件的结构示意图。
图13是本发明实施例的显微镜的电动载物机构的固定座的主视示意图。
图14是本发明实施例的显微镜的电动载物机构的固定座的立体示意图。
图15是本发明实施例的显微镜的电动载物机构的固定座的透视示意图。
图16是本发明实施例的智能化显微镜系统的组成示意图。
图17是下位机控制Z轴电机转动完成对焦的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
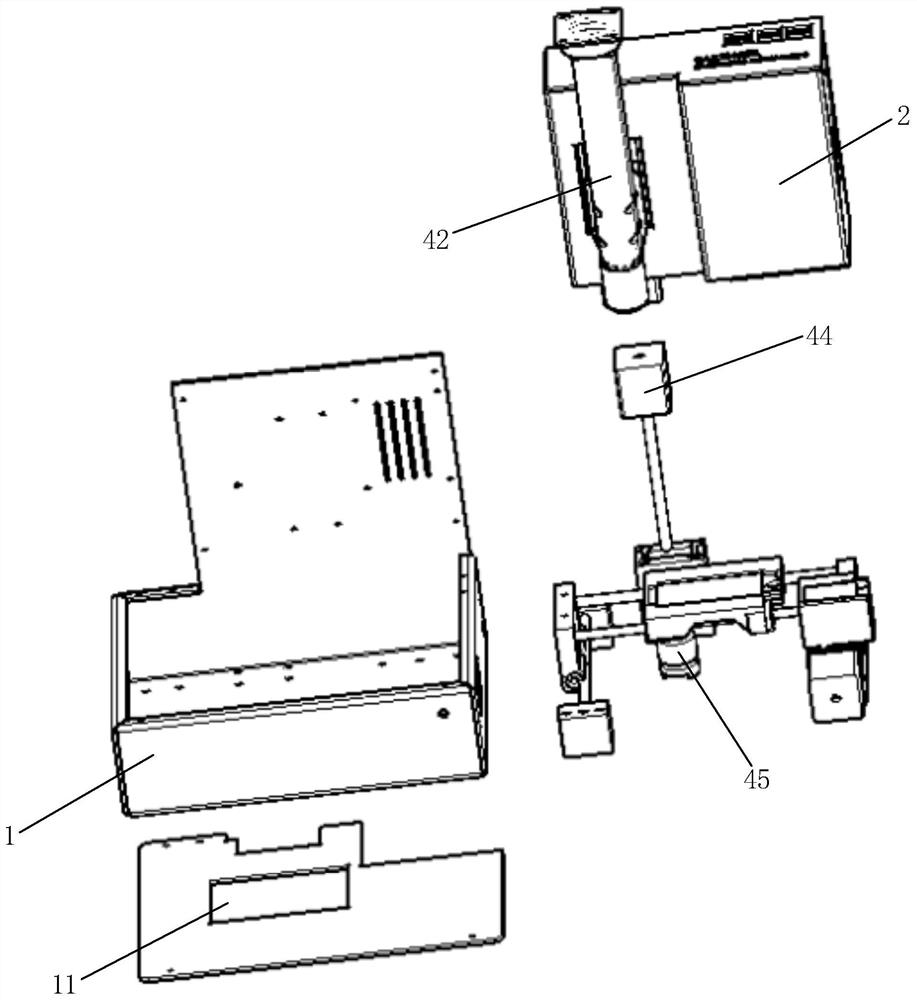
参阅图1至图7,本发明实施例的显微镜包括底壳1、上壳2、电动载物机构、光路机构和下位机(图未示),上壳2位于底壳1上,上壳2和底壳1均为中空结构且相互连通,底壳1的上表面开设有窗口11,电动载物机构位于底壳1内,能够搭载玻片46并在X轴和Y轴平面内移动,光路机构包括摄像头41、镜筒42、物镜43、Z轴电机44和光源45,镜筒42沿Z轴设置并位于窗口11上方,光源45位于底壳1的底部,摄像头41位于镜筒42的顶端,物镜43位于镜筒42的底端,摄像头41、镜筒42、物镜43、玻片46和光源45组成光路,Z轴电机44位于上壳2内,Z轴电机44用于驱动镜筒42沿Z轴移动,下位机用于控制电动载物机构移动、控制Z轴电机44转动以及控制摄像头41拍摄显微照片。下位机可以位于底壳1或上壳2内。
如图8至11所示,在本实施例中,电动载物机构包括Y轴电机31、X轴电机32、导轨滑台33、载物台34、电机联接件35、滑动联接件36、第一滑杆37、第二滑杆38和丝杆39。导轨滑台33上滑动连接有滑块331,Y轴电机31固定在导轨滑台33上以驱动滑块331沿第一方向滑动,电机联接件35固定在滑块331上,第一滑杆37相对导轨滑台33固定并沿第一方向设置,滑动联接件36滑动连接在第一滑杆37上,第二滑杆38的两端分别与电机联接件35和滑动联接件36固定,丝杆39与第二滑杆38相互平行并沿与第一方向垂直的第二方向设置,X轴电机32固定在电机联接件35上并联接丝杆39的一端以驱动丝杆39转动,丝杆39的另一端与滑动联接件36转动连接,第二滑杆38和丝杆39均穿过载物台34,第二滑杆38与载物台34滑动连接,丝杆39与载物台34螺纹连接,载物台34用于搭载玻片46,下位机用于控制Y轴电机31和X轴电机32转动。
如图9所示,第一方向与第二方向构成了平面坐标系的Y轴和X轴。当需要调整载物台34的Y轴位置时,通过第一电机31驱动滑块331滑动,进而调节载物台34在Y轴上的位置。当需要调整载物台34的X轴位置时,通过第二电机32驱动丝杆39转动,由于丝杆39相对载物台34固定,则载物台34会在丝杆39上移动,进而调节载物台34在X轴上的位置
如图13至15所示,电动载物机构还包括两个固定座371,两个固定座371分别位于第一滑杆37两端并与第一滑杆37两端固定连接。固定座371可以起到固定第一滑杆3的作用。
进一步的,固定座371沿Z轴方向开设有三个螺孔372,每一个固定座371设有三颗螺钉373,其中,两个螺钉373从底壳1的底部穿过后再与固定座371的两个螺孔372螺纹连接,另一颗螺钉373与固定座371的另一个螺孔372螺纹连接后再穿过底壳1的底部。
通过三个螺钉373,可以调节第一滑杆37的水平高度。具体而言,两个旋入方向相同的螺钉373作为调节螺钉(即图15中从下方旋入的螺钉),另一个螺钉373作为固定螺钉(即图15中从上方旋入的螺钉),首先将固定螺钉松开,利用调节螺钉调节第一滑杆37的水平高度,调节完毕后再拧紧固定螺钉将第一滑杆37的水平高度固定。
为了防止滑块331在移动过程中发生机械碰撞,在本实施例中,电机联接件35的底端设有安装支架351,安装支架351位于滑块331与导轨滑台33之间,并靠近导轨滑台33的端部,安装支架351上设有第一限位开关(图未示)。
进一步的,为了防止载物台34在移动过程中发生机械碰撞,在本实施例中,电机联接件35面向载物台34的一侧设有安装孔352,安装孔352内设有第二限位开关(图未示)。
第一限位开关和第二限位开关例如为触动开关,当滑块331或载物台34触碰到触动开关,使之发生开关动作时,Y轴电机31或X轴电机32就会接收到相应的信号,进而停止驱动,滑块331或载物台34就会立即停止动作。
Y轴电机31或X轴电机32的类型可以根据实际需要选择,例如,在一个应用场景中,Y轴电机31为28步进电机,X轴电机32为20丝杆步进电机。
为了对X轴电机32进行固定和保护,在本实施例中,电机联接件35上设有电机容纳槽353,X轴电机32固定在电机容纳槽353内。
参阅图16,本发明还保护一种智能化显微镜系统,包括客户端100、服务端200、用户终端300和前述实施例的显微镜400,下位机与客户端100无线连接或有线连接,客户端100与服务端200远程连接,服务端200与用户端300远程连接,下位机用于控制电动载物机构将玻片移动至窗口11、控制Z轴电机44转动完成调焦,以及控制摄像头41进行扫描获得显微照片,并上传至服务端200;
服务端200用于对显微照片进行人工智能识别得到人工智能分析结果,并推送给专家系统进行人为认证得到人为认证分析结果,以及结合人工智能分析结果和人为认证分析结果生成结论报告,将结论报告下发至用户终端300。
如图17所示,在本实施例中,下位机控制Z轴电机转动完成调焦的具体步骤包括:
S1:控制Z轴电机驱动镜筒到达调焦起始位置,并将预设初始步长作为当前步长。
其中,调焦起始位置是镜筒行程中的一个位置。
S2:控制Z轴电机驱动镜筒以当前步长向下步进移动,在每次移动后控制摄像头捕捉图像并计算图像清晰度,直至镜筒到达极限调焦位置为止,其中,极限调焦位置在调焦起始位置下方。
在本实施例中,电机为步进电机,步进电机做步进转动,则会驱动镜筒步进移动。极限调焦位置为镜筒行程的最下方的位置。镜筒每次向下步进移动当前步长后,摄像头捕捉图像,并计算图像的清晰度,在本实施例中,图像清晰度通过边缘检测Laplacian算子或Roberts梯度函数计算得到。
S3:选取图像清晰度最大时镜筒所在位置作为基准位置。
其中,镜筒移动过程中,将镜筒每次向下步进移动的步数和图像清晰度记录下来(I
步骤S1到S3是在调焦起始位置和极限调焦位置之间选取图像清晰度最大时镜筒所在位置作为基准位置,完成第一轮调焦(粗调)。
S4:判断当前步长是否小于预设阈值,在小于预设阈值时,进行步骤S5,在不小于预设阈值时,进行步骤S6。
其中,预设初始步长和预设阈值可以根据实际需要来设定,在本实施例中,所述预设初始步长与预设阈值的比值为2的整数倍,例如为32。。
S5:控制Z轴电机驱动镜筒到达基准位置,并结束调焦。
其中,如果当前步长小于预设阈值,表示镜筒的步进距离已经达到最小,不能再减小步进距离,因此需要结束调焦。
S6:控制Z轴电机驱动镜筒到达基准位置上方距离基准位置当前步长的位置。
其中,基准位置确定后,镜筒会回退到基准位置上方距离基准位置当前步长的位置。
S7:将当前步长的一半代替当前步长。
其中,经过步骤S7后,当前步长变小了。
S8:控制Z轴电机驱动镜筒以当前步长向下步进移动;
S9:在镜筒移动后控制摄像头捕捉图像并计算图像清晰度;
S10:判断图像清晰度是否大于镜筒上一次位置的图像清晰度,如果不大于镜筒上一次位置的图像清晰度,则将镜筒的上一次位置作为基准位置,并再次进行步骤S4,如果大于镜筒上一次位置的图像清晰度,则再次进行步骤S8。
其中,步骤S4到S10是在基准位置附近寻找最大的图像清晰度,完成第二轮调焦(精调)。通过两轮调焦,可以找到最大的图像清晰度,即镜筒处于最佳位置。
在本实施例中,图像清晰度通过边缘检测Laplacian算子或Roberts梯度函数计算得到。
下面将通过一个具体实例来说明本实施例的自动调焦方法的调焦过程。在该具体实例中,预设初始步长为0.64mm,预设数值为2,预设阈值为0.02mm,假设镜筒行程的最上方的位置的坐标为0mm,玻片更换位置为10mm,调焦起始位置为50mm,极限调焦位置为60mm,假设实际最大图像清晰度对应的镜筒位置为55.00mm。
进行步骤S1,镜筒到达调焦起始位置;
进行步骤S2,镜筒到达极限调焦位置;
进行步骤S3,图像清晰度最大时镜筒所在位置为55.12mm,即基准位置为55.12mm。
进行步骤S4,当前步长0.64mm大于0.02mm;
进行步骤S6,镜筒到达基准位置上方距离基准位置0.64mm的位置,即55.12mm-0.64mm=54.48mm处;
进行步骤S7,当前步长变为0.32mm;
进行步骤S8,镜筒向下移动到达位置54.80mm;
进行步骤S9,计算54.80mm处的图像清晰度;
进行步骤S10,54.80mm处的图像清晰度大于54.48mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.12mm;
进行步骤S9,计算55.12mm处的图像清晰度;
进行步骤S10,55.12mm处的图像清晰度大于54.80mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.44mm;
进行步骤S9,计算55.44mm处的图像清晰度;
进行步骤S10,55.44mm处的图像清晰度不大于55.12mm处的图像清晰度,将55.12mm作为基准位置,并再次进行步骤S4;
进行步骤S4,当前步长0.32mm大于0.02mm;
进行步骤S6,镜筒到达基准位置上方距离基准位置0.32mm的位置,即55.12mm-0.32mm=54.80mm处;
进行步骤S7,当前步长变为0.16mm;
进行步骤S8,镜筒向下移动到达位置54.96mm;
进行步骤S9,计算54.96mm处的图像清晰度;
进行步骤S10,54.96mm处的图像清晰度大于54.80mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.12mm;
进行步骤S9,计算55.12mm处的图像清晰度;
进行步骤S10,55.12mm处的图像清晰度不大于54.96mm处的图像清晰度,将54.96mm作为基准位置,并再次进行步骤S4;
进行步骤S4,当前步长0.16mm大于0.02mm;
进行步骤S6,镜筒到达基准位置上方距离基准位置0.16mm的位置,即54.96mm-0.16mm=54.80mm处;
进行步骤S7,当前步长变为0.08mm;
进行步骤S8,镜筒向下移动到达位置54.88mm;
进行步骤S9,计算54.88mm处的图像清晰度;
进行步骤S10,54.88mm处的图像清晰度大于54.80mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置54.96mm;
进行步骤S9,计算54.96mm处的图像清晰度;
进行步骤S10,54.96mm处的图像清晰度大于54.88mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.04mm;
进行步骤S9,计算55.04mm处的图像清晰度;
进行步骤S10,55.04mm处的图像清晰度不大于54.96mm处的图像清晰度,将54.96mm作为基准位置,并再次进行步骤S4;
进行步骤S4,当前步长0.08mm大于0.02mm;
进行步骤S6,镜筒到达基准位置上方距离基准位置0.08mm的位置,即54.96mm-0.08mm=54.88mm处;
进行步骤S7,当前步长变为0.04mm;
进行步骤S8,镜筒向下移动到达位置54.92mm;
进行步骤S9,计算54.92mm处的图像清晰度;
进行步骤S10,54.92mm处的图像清晰度大于54.88mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置54.96mm;
进行步骤S9,计算54.96mm处的图像清晰度;
进行步骤S10,54.96mm处的图像清晰度大于54.92mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.00mm;
进行步骤S9,计算55.00mm处的图像清晰度;
进行步骤S10,55.00mm处的图像清晰度大于54.96mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.04mm;
进行步骤S9,计算55.04mm处的图像清晰度;
进行步骤S10,55.04mm处的图像清晰度不大于55.00mm处的图像清晰度,将55.00mm作为基准位置,并再次进行步骤S4;
进行步骤S4,当前步长0.04mm大于0.02mm;
进行步骤S6,镜筒到达基准位置上方距离基准位置0.04mm的位置,即55.00mm-0.04mm=54.96mm处;
进行步骤S7,当前步长变为0.02mm;
进行步骤S8,镜筒向下移动到达位置54.98mm;
进行步骤S9,计算54.98mm处的图像清晰度;
进行步骤S10,54.98mm处的图像清晰度大于54.96mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.00mm;
进行步骤S9,计算55.00mm处的图像清晰度;
进行步骤S10,55.00mm处的图像清晰度大于54.98mm处的图像清晰度,再次进行步骤S8;
进行步骤S8,镜筒向下移动到达位置55.02mm;
进行步骤S9,计算55.02mm处的图像清晰度;
进行步骤S10,55.02mm处的图像清晰度不大于55.00mm处的图像清晰度,将55.00mm作为基准位置,并再次进行步骤S4;
进行步骤S4,当前步长0.02mm等于(不小于)0.02mm;
进行步骤S7,当前步长变为0.01mm;
进行步骤S8,镜筒向下移动到达位置55.01mm;
进行步骤S9,计算55.01处的图像清晰度;
进行步骤S10,55.01mm处的图像清晰度不大于55.00mm处的图像清晰度,将55.00mm作为基准位置,并再次进行步骤S4;
进行步骤S4,当前步长0.01mm小于0.02mm;
进行步骤S5,结束调焦,镜筒刚好位于55mm处。
通过上述方式,本发明实施例的显微镜以及智能化显微镜系统通过Y轴电机和X轴电机对载物台进行Y轴方向和X轴方向的位置调节,通过Z轴电机对镜筒进行Z轴方向的调节,从而能够自动调节视野和自动调焦,电机的响应速度快,并且控制精度高,因此可以提高调节速度和精度。
以上所述仅为本申请的实施例而已,并不用于限制本申请的保护范围,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
- 一种显微镜以及智能化显微镜系统
- 一种超短共轭距显微镜头光学系统及显微镜