一种无人机光电载荷安装装置
文献发布时间:2023-06-19 11:42:32
技术领域
本发明属于无人机应用技术领域,更具体地,涉及一种无人机光电载荷安装装置。
背景技术
光电载荷作为全天时的侦查装备,内部集成有可见光传感器、红外传感器和激光测照器,是察打一体大型无人机的核心载荷,一般集成安装在无人机的底部。光电吊舱设备精密,价格昂贵,部分用户存在购买的无人机数量多于光电载荷吊舱数量的情况,在实际使用中需要将光电载荷吊舱在无人机之间进行频繁更换。
光电载荷一般呈球型,可见光传感器、红外传感器和激光测照器集成在球体内部,球体与光电载荷的转塔连接,转塔通过螺钉与无人机内部的框板上的角盒连接。光电安装过程需要将光电吊舱从无人机底部抬升至无人机内部的框板角盒位置进行螺栓连接,由于无人机底部安装空间小,且光电载荷结构形状的特殊性,人工安装存在诸多不便。
发明内容
本发明的目的是针对现有技术存在的不足,提供了一种无人机光电载荷安装装置,采用支撑架对光电载荷的底部稳定支撑,通过升降机构和全向轮组在空间狭小的区域内将光电载荷送到无人机底部,通过结构简单的安装装置,将光电载荷快速且精确的调整到要求的安装位置上,在保护光电载荷完好的情况下便于工人进行快速安装,提高安装效率和安装质量。
为了实现上述目的,本发明提供一种一种无人机光电载荷安装装置,包括:
底盘,所述底盘包括车架和全向轮组,所述全向轮组在所述车架的两侧分别设置有两个;
升降机构,所述升降机构的底部与所述底盘的上部连接;
支撑架,所述支撑架的底部与所述升降机构的顶部相连接,所述支撑架的顶部与光电载荷相配合,所述支撑架内能够容纳所述光电载荷并对所述光电载荷限位,所述升降机构能够带动所述支撑架升降运动;
控制单元,与所述全向轮组和所述升降机构电性连接,所述控制单元设置于所述底盘上。
可选地,所述全向轮组包括:
直流电机,设置于所述车架上;
减速机,一端与所述直流电机的输出端相连接;
轮毂,与所述减速机的另一端相连接;
麦卡纳姆轮,套设于所述转毂的外周上。
可选地,所述控制单元包括蓄电池,所述蓄电池与所述直流电机相连接。
可选地,所述升降机构包括:
平板,设置于所述车架的上方;
下支臂,一端与所述车架的一端铰接;
上滑槽,开设于所述平板的一端,所述下支臂的另一端与所述上滑槽滑动连接;
上支臂,一端与所述平板的另一端铰接连接,所述下支臂的中部与所述上支臂的中部铰接形成剪叉结构;
下滑槽,开设于所述车架的中部,所述上支臂的另一端与所述下滑槽滑动连接;
电动缸,所述电动缸的基座与所述车架铰接,所述电动缸的输出端与所述下支臂的中部铰接。
可选地,所述支撑架包括:
连接底板,与所述所述升降机构的顶部相连接;
支撑板,与所述连接底板的顶部相连接;
支撑环,所述支撑环通过多个支撑杆与所述连接底板的顶部相连接,多个所述支撑杆设置于所述支撑板的外周上,所述支撑环与所述支撑板之间形成容纳腔,所述容纳腔能够容纳所述光电载荷并对所述光电载荷限位。
可选地,所述支撑环的内径不小于所述光电载荷的外径。
可选地,所述支撑板的上表面上开设有凹球状槽,所述凹球状槽与所述光电载荷相配合,所述凹球状槽的上部设置有衬垫。
可选地,所述支撑杆设置有四个,四个所述支撑杆沿所述支撑板的外周均布。
可选地,所述支撑环上套设有保护套。
可选地,所述保护套为毛毡。
本发明提供了一种无人机光电载荷安装装置,其有益效果在于:
1、该安装装置采用麦卡纳姆轮,便于在空间狭小的区域内把光电载荷运输到要求的位置上,给工人安装光电载荷提供了便利条件;
2、该安装装置的支撑环和支撑板形成的容纳腔,针对光电载荷设备精密的特点,将光电载荷固定在容纳腔内,并且对其进行限位,保证光电载荷在移动时的稳定性和安全性。
本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
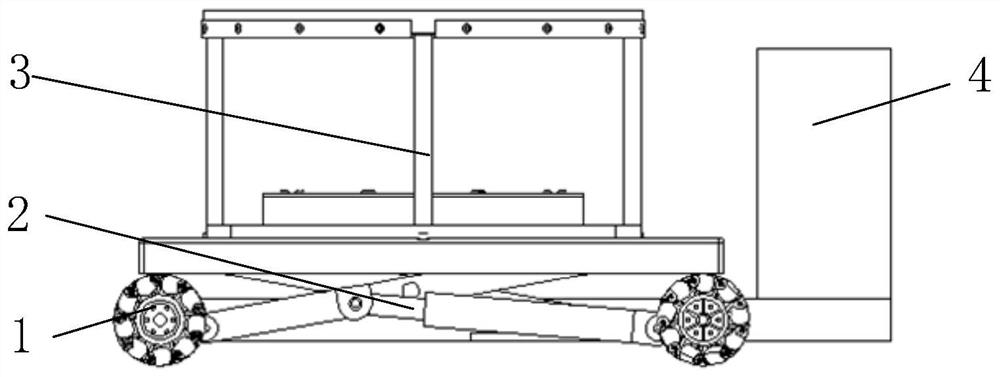
图1示出了根据本发明的一个实施例的一个无人机光电载荷安装装置的结构示主视图。
图2示出了图1的立体图。
图3示出了根据本发明的一个实施例的底盘与升降机构连接的结构示意图。
图4示出了根据本发明的一个实施例的支撑架的结构示意图。
图5示出了根据本发明的一个实施例的全向轮组的结构示意图。
图6示出了根据本发明的一个实施例的一个无人机光电载荷安装装置承载光电载荷的示意图。
附图标记说明:
1、底盘;2、升降机构;3、支撑架;4、控制单元;5、全向轮组;6、车架;7、光电载荷;8、平板;9、电动缸;10、直流电机;11、下支臂;12、下滑槽;13、上支臂;14、减速机;15、上滑槽;16、麦卡纳姆轮;17、轮毂;18、连接底板;19、支撑杆;20、支撑环;21、支撑板;22、衬垫、23、保护套。
具体实施方式
下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
本发明提供了一种无人机光电载荷安装装置,包括:
底盘,底盘包括车架和全向轮组,全向轮组在车架的两侧分别设置有两个;
升降机构,升降机构的底部与底盘的上部连接;
支撑架,支撑架的底部与升降机构的顶部相连接,支撑架的顶部与光电载荷相配合,支撑架内能够容纳光电载荷并对光电载荷限位,升降机构能够带动支撑架升降运动;
控制单元,与全向轮组和升降机构电性连接,控制单元设置于底盘上。
具体的,该安装装置的底盘设置有全向轮组能在无人机下部狭小空间内将光电载荷运送到指定的位置,再通过升降机构将支撑架上固定的光电载荷进行顶升,减少更换光电载荷过程中的人工参与,降低光电载荷安装工作的人工成本,缩短更换光电载荷时间;由于光电载荷为精密设备,因此设定支撑架可以增加对光电载荷的固定位置的牢固性和准确性,在移动光电载荷时安装孔位置保持稳定,再通过控制单元控制全向轮组和升降机构将光电载荷准确运输到无人机底部的安装位置,使工人在安装时无需调整直接就能进行安装,降低安装难度,同时避免光电载荷在安装中磕碰损坏。
可选地,全向轮组包括:
直流电机,设置于车架上;
减速机,一端与直流电机的输出端相连接;
轮毂,与减速机的另一端相连接;
麦卡纳姆轮,套设于转毂的外周上。
具体的,该安装装置安装了四个全向轮组,每个全向轮组通过减速器控制轮毂的转动速度,已达到每个麦卡纳姆轮转速不同,使该安装装置能够在狭小空间内全方向移动到达指定位置。
可选地,控制单元包括蓄电池,蓄电池与直流电机相连接。
具体的,蓄电池作为该安装装置的动力来源,可以缩小控制单元的占用空间,并且蓄电池能过反复充电,可以适合不同的工作环境,还有蓄电池容易检修,降低了该安装装置的维护成本。
可选地,升降机构包括:
平板,设置于车架的上方;
下支臂,一端与车架的一端铰接;
上滑槽,开设于平板的一端,下支臂的另一端与上滑槽滑动连接;
上支臂,一端与平板的另一端铰接连接,下支臂的中部与上支臂的中部铰接形成剪叉结构;
下滑槽,开设于车架的中部,上支臂的另一端与下滑槽滑动连接;
电动缸,电动缸的基座与车架铰接,电动缸的输出端与下支臂的中部铰接。
具体的,通过上支臂和下支臂的形成的剪叉结构,在电动缸的带动下,使平板带动支撑架能够平稳的升降;在不需要升高支撑架时,上支臂和下支臂能够折叠收纳在升降机构中,降低升降机构的整体高度,能够适应在无人机底部的狭小空间内灵活移动;电动缸的输出端与下支臂的中部铰接,只需要电动缸工作带动下支臂运动,就能够使升降机构运行,结构简单稳定,易于维护。
可选地,支撑架包括:
连接底板,与升降机构的顶部相连接;
支撑板,与连接底板的顶部相连接;
支撑环,支撑环通过多个支撑杆与连接底板的顶部相连接,多个支撑杆设置于支撑板的外周上,支撑环与支撑板之间形成容纳腔,容纳腔能够容纳光电载荷并对光电载荷限位。
具体的,支撑板和支撑环形成的容纳腔,容纳腔与光电载荷的形面相符,可以将光电载荷便捷可靠的放置在支撑架上,保证光电载荷在升降运动和平移运动时达到有效保护,避免光电载荷位置发生窜动,以免影响后续在无人机的安装工作。
可选地,支撑环的内径不小于光电载荷的外径。
具体的,光电载荷的底部被支撑板承托,由于支撑环不小于光电载荷的外径,支撑环将光电载荷进行有效的限位,保证光电载荷设备在运送和安装过程中不会造成损坏。
可选地,支撑板的上表面上开设有凹球状槽,凹球状槽与光电载荷相配合,凹球状槽的上部设置有衬垫。
具体的,支撑板的上表面为凹球状槽,光电载荷与支撑板能够完全贴合,保证光电载荷的稳定性,凹球状槽上的衬垫使光电载荷与支撑板增大摩擦力,保证光电载荷在支撑板上不会发生移动,使光电载荷的安装位置始终保持正确,为向无人机上安装光电载荷提供了便利条件。
在一个实施例中,衬垫采用毛毡材料,进一步增加支撑板与光电载荷的摩擦力,而且缓冲支撑板对光电载荷的振动,避免造成精密设备的损坏。
可选地,支撑杆设置有四个,四个支撑杆沿支撑板的外周均布。
具体的,四根支撑杆均匀设置在支撑板的外周上,支撑杆与支撑板垂直连接,支撑环与支撑杆垂直连接,并且支撑板的凹球状槽与支撑环的中心重合,四个支撑杆能够将支撑环受到光电载荷的力均匀分解,提高支撑环的固定强度,同样保证支撑板与支撑环形成的容纳腔对于光电载荷的限制更加稳定;由于该安装装置也是移动光电载荷的装置,该安装装置从一个无人机上将光电载荷拆下,等待安装在另一个无人机上,为了减少移动光电载荷过程中的出现磕碰现象,光电载荷一直在该安装装置上存放,支撑杆可以有效的缓解光电载荷对该安装装置结构上的影响。
可选地,支撑环上套设有保护套。
具体的,支撑环上设有保护套,减弱支撑环在运送过程中对光电载荷的振动,使光电载荷在该安装装置上移动时得到充分的缓冲。
可选地,保护套为毛毡。
具体的,毛毡材料的保护套,可以增加光电载荷与支撑环的摩擦力,保证在光电载荷运送过程中,不会在支撑环上移动,保证光电载荷的安装位置始终保持正确,为向无人机上安装光电载荷提供了便利条件;当该安装装置从一个无人机上将光电载荷拆下时,光电载荷的安装孔位置是正确的,由于光电载荷不需要从装置上取下来,直接安装在另一个无人机上,毛毡保护套可以保证光电载荷的位置保持不变,安装孔位置也不需要调整,直接将光电载荷举升到所需的位置,就能够直接进行安装,降低了光电载荷的安装难度,缩短了安装时间。
实施例
如图1至图6所示,本发明提供了一种无人机光电载荷安装装置,包括:
底盘1,底盘1包括车架6和全向轮组5,全向轮组5在车架6的两侧分别设置有两个;
升降机构2,升降机构2的底部与底盘1的上部连接;
支撑架3,支撑架3的底部与升降机构2的顶部相连接,支撑架3的顶部与光电载荷7相配合,支撑架3内能够容纳光电载荷7并对光电载荷7限位,升降机构2能够带动支撑架3升降运动;
控制单元4,与全向轮组5和升降机构2电性连接,控制单元4设置于底盘1上。
在本实施例中,全向轮组5包括:
直流电机10,设置于车架6上;
减速机14,一端与直流电机10的输出端相连接;
轮毂17,与减速机14的另一端相连接;
麦卡纳姆轮16,套设于转毂17的外周上。
在本实施例中,控制单元4包括蓄电池,蓄电池与直流电机10相连接。
在本实施例中,升降机构2包括:
平板8,设置于车架6的上方;
下支臂11,一端与车架6的一端铰接;
上滑槽15,开设于平板8的一端,下支臂11的另一端与上滑槽15滑动连接;
上支臂13,一端与平板8的另一端铰接连接,下支臂11的中部与上支臂13的中部铰接形成剪叉结构;
下滑槽12,开设于车架6的中部,上支臂13的另一端与下滑槽12滑动连接;
电动缸9,电动缸9的基座与车架6铰接,电动缸9的输出端与下支臂11的中部铰接。
在本实施例中,支撑架3包括:
连接底板18,与升降机构2的顶部相连接;
支撑板21,与连接底板18的顶部相连接;
支撑环20,支撑环20通过多个支撑杆19与连接底板18的顶部相连接,多个支撑杆19设置于支撑板21的外周上,支撑环20与支撑板21之间形成容纳腔,容纳腔能够容纳光电载荷7并对光电载荷7限位。
在本实施例中,支撑环20的内径不小于光电载荷7的外径。
在本实施例中,支撑板21的上表面上开设有凹球状槽,凹球状槽与光电载荷7相配合,凹球状槽的上部设置有衬垫22。
在本实施例中,支撑杆19设置有四个,四个支撑杆19沿支撑板21的外周均布。
在本实施例中,支撑环20上套设有保护套23。
在本实施例中,保护套23为毛毡。
综上,在无人机需要安装光电载荷时,首先,通过控制单元4对全向轮组5进行操作,将事先放置在容纳腔中的光电载荷7进行移动,使光电载荷7到达无人机的底部,然后,在对电动缸9操作,使升降机构2将光电载荷7举升到所需的安装位置,无需对光电载荷7的位置进行调整,就能完成无人机与光电载荷的安装工作;当无人机的光电载荷7需要拆卸时,首先,该安装装置移动到无人机底部,升降机构2升起带动支撑环20与光电载荷7完全贴合,确保光电载荷7的下部与支撑环20和支撑板21贴合稳定,在对无人机与光电载荷7进行拆卸工作,拆卸后,升降机构2下降将光电载荷7稳定的放置支撑架3上,等待下次安装,这样安装光电载荷7操作简便,同时减少对光电载荷7的磕碰。
以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
- 一种无人机光电载荷安装装置
- 一种无人机载荷装置与双载荷无人机