一种智能配网主站AI机器人
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及人工智能技术领域,尤其涉及一种智能配网主站AI机器人。
背景技术
在计算机科学中,人工智能(AI)有时被称为机器智能,是由机器展示的智能,与人类和动物展示的自然智能形成对比。随着人工智能的不断发展,基于IRT的智能配网主站AI机器人越来越普遍,传统的智能配网主站AI机器人上的AI摄像头在安装和拆卸的过程中较为繁琐,影响AI摄像头的检修。
因此针对这一现状,迫切需要设计和生产一种智能配网主站AI机器人,以满足实际使用的需要。
发明内容
本发明所要解决的技术问题在于,提出一种智能配网主站AI机器人,以方便AI摄像头的安装、拆卸以及调节。
为了解决上述技术问题,本发明提供一种智能配网主站AI机器人,包括:柜体、设置在所述柜体后部的调节件、设置在所述调节件顶部的顶板、设置在所述顶板上的支撑件、设置在所述支撑件顶部的AI摄像头;
所述调节件包括限位块、套筒和液压杆,两个所述液压杆的活塞杆分别贯穿两个所述限位块并分别与两个所述套筒连接,两个所述套筒均焊接在所述顶板的底端,两个液压杆的活塞杆带动所述顶板、支撑件和AI摄像头升降;
所述支撑件包括与所述顶板相连接的圆板、安装在所述圆板顶部的支撑块、安装在所述支撑块顶部的底托,所述AI摄像头的底座与所述底托连接,所述支撑块的两侧均一体成型有凸起,两个所述凸起内均设有活动块,两个所述活动块相向的端部均一体成型有卡块,两个所述活动块远离所述支撑块的侧壁均焊接有插销,两个所述插销上均套有第一弹簧,所述支撑块的两侧开设有与所述卡块适配的第一插槽。
进一步地,所述柜体的一侧焊接有扶手,所述柜体的另一侧设有辅助支撑件,所述辅助支撑件包括支板、焊接在所述支板底端的两个支柱、焊接在两个所述支柱之间的连杆,两个所述支柱的底端均安装有刹车滚轮。
进一步地,所述柜体内构造有与储存件适配的第一凹槽以及若干个与抽屉适配的容纳槽,所述调节件设置在所述柜体远离第一凹槽的一侧。
进一步地,所述储存件包括槽体、隔板和活动板,所述槽体的外壁焊接有把手,所述槽体的两个对称设置的竖向内壁均构造有与所述隔板适配的第二插槽,所述隔板朝向把手的一侧焊接有两个横杆,所述活动板位于所述隔板与把手之间,所述活动板内开设有两个与所述横杆适配的通孔,两个所述横杆上均套有第二弹簧,两个所述第二弹簧均位于所述活动板与把手之间。
进一步地,所述柜体远离所述辅助支撑件的一侧开设有若干个与限位螺栓适配的螺孔,其中一个限位螺栓的端部与所述槽体相抵,另外多个限位螺栓的端部分别与若干个抽屉相抵。
进一步地,所述柜体远离所述限位螺栓的一侧构造有与所述支板适配的第二凹槽,所述支板远离所述限位螺栓的一侧焊接有拉手;所述柜体具有一底板,所述底板的底端的四角处均安装有刹车滚轮,所述底板的顶端通过螺栓与所述柜体固定。
进一步地,所述顶板的底端焊接有U形的支架,所述支架的底端通过螺栓固定有电机,所述电机的输出轴贯穿所述支架并通过联轴器与立柱连接,所述立柱的顶端贯穿所述顶板并与固定在所述支撑件底端的法兰盘焊接,所述法兰盘通过螺栓与所述圆板连接。
进一步地,两个所述限位块的两侧均一体成型有凸缘,四个凸缘内均开设有与螺栓适配的螺孔,所述柜体的侧壁开设有四个与螺栓适配的螺孔,所述限位块通过螺栓固定在所述柜体上。
进一步地,两个所述插销远离所述支撑块的端部分别贯穿两个所述凸起并分别焊接有凸块,所述支撑块内构造有与所述底托适配的第三凹槽,所述AI摄像头的底座通过四个锁紧螺栓与所述底托连接。
进一步地,所述顶板的顶端构造有与所述圆板适配的第四凹槽,所述圆板的底端固定有若干个环形阵列排列的万向球。
本发明实施例的有益效果在于:利用锁紧螺栓将AI摄像头自带的底座固定在底托上,拉动两个插销,将底托插入支撑块的凹槽中后松开两个插销,两个第一弹簧复位的过程中能够推动两个活动块和两个卡块向底托移动,从而使两个卡块插入底托两侧的第一插槽,方便AI摄像头的安装;两个液压杆的活塞杆带动顶板、支撑件和AI摄像头升降,能够调节AI摄像头的高度,电机的输出轴带动圆板和AI摄像头旋转,能够调节AI摄像头的朝向,利于对不同的位置进行拍摄;只需拉动两个插销并上提AI摄像头即可使AI摄像头底端的底托与支撑块分离,方便AI摄像头的检修;抽拉支板并锁死两个支柱底端的刹车滚轮,增加了使用面积,方便在支板上放置物品;将活动板向把手一侧推动,将物品置于隔板与活动板之间后松开活动板,能够将槽体内部分隔成不同大小的空间,两个第二弹簧复位并推动活动板向隔板移动,方便物品的固定。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
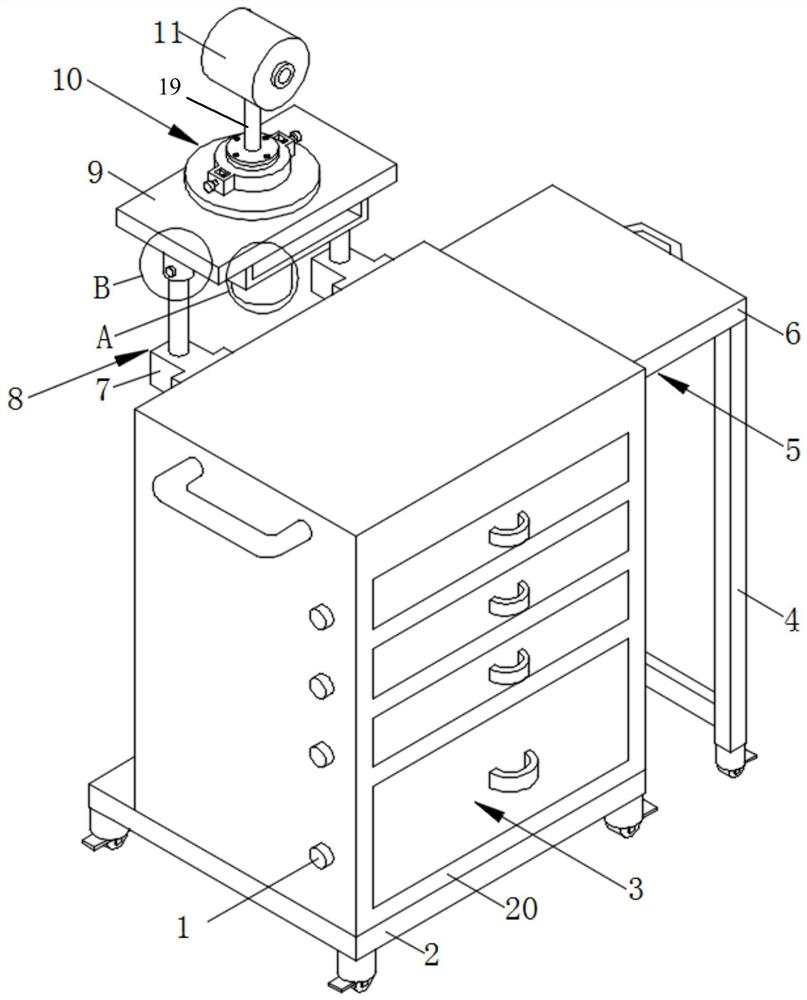
图1为本发明实施例一种智能配网主站AI机器人的立体结构示意图。
图2为本发明实施例中储存件的结构示意图。
图3为图1中A处结构的放大图。
图4为图1中B处结构的放大图。
图5为本发明实施例中支撑件的结构示意图。
附图标记为:1-限位螺栓、2-底板、20-柜体、3-储存件、30-槽体、31-隔板、32-横杆、33-活动板、4-支柱、5-辅助支撑件、6-支板、7-限位块、8-调节件、80-套筒、81-液压杆、9-顶板、90-支架、91-电机、10-支撑件、11-AI摄像头、12-底托、13-支撑块、14-活动块、15-插销、16-凸起、17-圆板、18-卡块、19-立柱。
具体实施方式
以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。本发明所提到的方向和位置用语,例如「上」、「下」、「前」、「后」、「左」、「右」、「内」、「外」、「顶部」、「底部」、「侧面」等,仅是参考附图的方向或位置。因此,使用的方向和位置用语是用以说明及理解本发明,而非对本发明保护范围的限制。
请同时参照图1-图5所示,本发明实施例提供一种智能配网主站AI机器人,包括:柜体20、设置在所述柜体20后部的调节件8、设置在所述调节件8顶部的顶板9、设置在所述顶板9上的支撑件10、设置在所述支撑件10顶部的AI摄像头11;
所述调节件8包括限位块7、套筒80和液压杆81,两个所述液压杆81的活塞杆分别贯穿两个限位块7并分别与两个套筒80连接,两个所述套筒80均焊接在所述顶板9的底端,两个液压杆81的活塞杆带动顶板9、支撑件10和AI摄像头11升降;
所述支撑件10包括与所述顶板9相连接的圆板17、安装在所述圆板17顶部的支撑块13、安装在所述支撑块13顶部的底托12,所述AI摄像头11的底座与所述底托12连接,所述支撑块13的两侧均一体成型有凸起16,两个所述凸起16内均设有活动块14,两个所述活动块14相向的端部均一体成型有卡块18,两个所述活动块14远离支撑块13的侧壁均焊接有插销15,两个所述插销15上均套有第一弹簧,所述支撑块13的两侧开设有与所述卡块适配的第一插槽。
具体地,如图1所示,柜体20具有一底板2,底板2的底端的四角处均安装有刹车滚轮,底板2的顶端通过螺栓与柜体20固定。柜体20的一侧焊接有扶手,柜体20的另一侧设有辅助支撑件5,柜体20内构造有与储存件3适配的第一凹槽以及若干个与抽屉适配的容纳槽,调节件8设置在柜体20远离第一凹槽的一侧。
辅助支撑件5包括支板6、焊接在所述支板6底端的两个支柱4、焊接在两个支柱4之间的连杆。柜体20远离限位螺栓1的一侧构造有与支板6适配的第二凹槽,支板6远离限位螺栓1的一侧焊接有拉手,两个支柱4的底端均安装有刹车滚轮,抽拉支板6并锁死两个支柱4底端的刹车滚轮,增加了使用面积,方便在支板6上放置物品。
再结合图2所示,柜体20远离辅助支撑件5的一侧开设有若干个与限位螺栓1适配的螺孔,其中一个限位螺栓1的端部与槽体30相抵,另外多个限位螺栓1的端部分别与若干个抽屉相抵。储存件3包括槽体30、隔板31和活动板33,槽体30的外壁焊接有把手,槽体30的两个对称设置的竖向内壁均构造有与隔板31适配的第二插槽,隔板31朝向把手的一侧焊接有两个横杆32,活动板33位于隔板31与把手之间,活动板33内开设有两个与横杆32适配的通孔,两个横杆32上均套有第二弹簧,两个第二弹簧均位于活动板33与把手之间,将活动板33向把手一侧推动,将物品置于隔板31与活动板33之间后松开活动板33,能够将槽体30内部分隔成不同大小的空间,两个第二弹簧复位并推动活动板33向隔板31移动,方便物品的固定。
请再参照图3所示,顶板9的底端焊接有U形的支架90,支架90的底端通过螺栓固定有型号为YCT90-4A的电机91,电机91的输出轴贯穿支架90并通过联轴器与立柱19连接,立柱的顶端贯穿顶板9并与固定在支撑件10底端的法兰盘焊接,法兰盘通过螺栓与圆板17连接。
请再参照图4所示,调节件8包括限位块7、套筒80和型号为YNT-05的液压杆81,两个限位块7的顶端分别通过螺栓固定有液压杆81,两个液压杆81的活塞杆分别贯穿两个限位块7并分别通过螺栓与两个套筒80连接,两个套筒80均焊接在顶板9的底端,两个液压杆81的活塞杆带动顶板9、支撑件10和AI摄像头11升降,能够调节AI摄像头11的高度。两个限位块7的两侧均一体成型有凸缘,四个凸缘内均开设有与螺栓适配的螺孔,柜体20的侧壁开设有四个与螺栓适配的螺孔,通过螺栓将限位块7固定在柜体20上,能够提高两个液压杆81的稳定性。
再如图5所示,两个所述插销15远离支撑块13的端部分别贯穿两个凸起16并分别焊接有凸块,所述支撑块13内构造有与底托12适配的第三凹槽。支撑块13的第一插槽延伸至两个凸起16内。底托12的顶端开设有四个与锁紧螺栓适配的螺孔,AI摄像头11的底座通过四个锁紧螺栓与底托12连接。顶板9的顶端构造有与圆板17适配的第四凹槽,圆板17的底端固定有若干个环形阵列排列的万向球,若干个万向球自带的连接座均与圆板17焊接,提高了圆板17的稳定性。
本发明实施例的工作原理及效果为:将活动板33向把手一侧推动,将物品置于隔板31与活动板33之间后松开活动板33,能够将槽体30内部分隔成不同大小的空间,两个第二弹簧复位并推动活动板33向隔板31移动,方便物品的固定;抽拉支板6并锁死两个支柱4底端的刹车滚轮,增加了使用面积,方便在支板6上放置物品,利用锁紧螺栓将AI摄像头11自带的底座固定在底托12上,拉动两个插销15,将底托12插入支撑块13的凹槽中后松开两个插销15,两个第一弹簧复位的过程中能够推动两个活动块14和两个卡块向底托12移动,从而使两个卡块插入底托12两侧的第一插槽,方便AI摄像头11的安装,两个液压杆81的活塞杆带动顶板9、支撑件10和AI摄像头11升降,能够调节AI摄像头11的高度,电机91的输出轴带动圆板17和AI摄像头11旋转,能够调节AI摄像头11的朝向,利于对不同的位置进行拍摄,只需拉动两个插销15并上提AI摄像头11即可使AI摄像头11底端的底托12与支撑块13分离,方便AI摄像头11的检修。
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 一种智能配网主站AI机器人
- 一种吊轨AI人工智能巡检机器人及机器人的定位灭火方法