一种危险品图形识别算法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及电子与信息技术领域,尤其涉及一种危险品图形识别算法。
背景技术
经检索,中国专利号CN105427712B公开了一种基于三维X射线成像的危险品自动识别装置及方法,该发明X射线检测系统检测手段的单一,检测准确率较低;目前,在机场、车站、政府大楼和监狱等需要进行安全检查的地方大多都配备有安全检查设备,如磁力针、金属武器检测门和X射线检测仪等,这些安全检查设备能够发现武器和普通炸药等危险品,在安全检查工作中发挥了重要作用;但是,这些设备受原有技术条件所限,在实际使用过程中不尽如人意,误报率和漏检率较高;而且随着科学技术的发展,犯罪分子和恐怖分子也逐步开始利用上了高新技术来制造新的武器和爆炸物等;像利用集成电路技术制造的高精密炸弹、塑性炸药及许多毒品等,采用上述传统检测手段则无能为力;因此,发明出一种危险品图形识别算法变得尤为重要;
现有的危险品识别方法,大多是采用传统安全检查设备配合安检人员进行危险品识别,其虽然能够发现武器和普通炸药等危险品,但容易增加安检人员的劳动强度,而且此类传统安全检查设备受原技术条件所限,无法对集成电路技术制造的高精密炸弹、塑性炸药及许多毒品等进行快速识别,而且对于对密度较低物品,如煤油和乙醇等,识别效果也显得不太理想;为此,我们提出一种危险品图形识别算法。
发明内容
本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种危险品图形识别算法。
为了实现上述目的,本发明采用了如下技术方案:
一种危险品图形识别算法,该识别算法具体步骤如下:
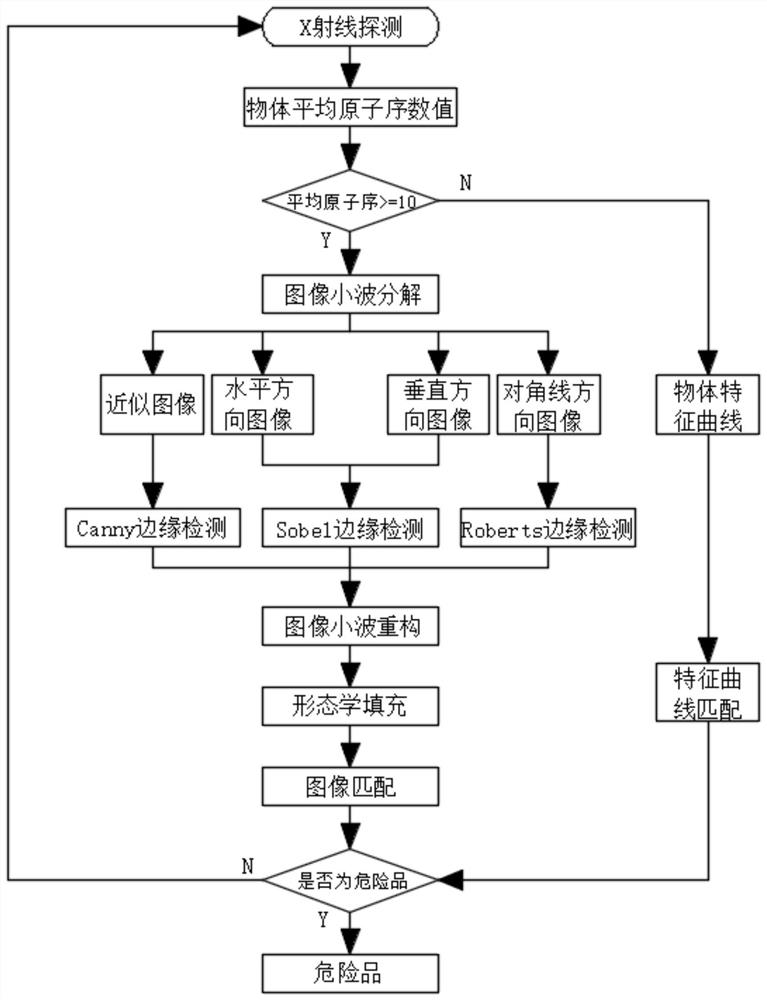
(1)X射线探测:由X射线探测器获取待测物体图像平均有效原子序数值,若其值大于等于10时,则跳到步骤(2)对待测物体图像进行图像小波分解,若其值小于等于10时,则跳到步骤(6)对待测物体图像进行特征曲线检测;
(2)图像小波分解:采用小波分解方法对待测物体图像进行一层小波分解,每一层图像均被分解为低频和高频的小波系数矩阵,其中低频系数代表了图像的近似部分,而高频则包含了水平方向、垂直方向和对角线方向系数;
(3)图像小波重构:利用Canny算法对图像近似部分,即低频部分进行边缘检测,得到低频部分的子图像;同时利用Roberts和Sobel算法对图像水平方向、垂直方向和对角线方向系数,即高频部分进行边缘检测,得到高频部分的子图像;将低频部分的子图像和高频部分的子图像进行小波重构,得到边缘图像;
(4)形态学填充:利用孔洞填充方式对边缘图像进行形态学填充,得到待测增强边缘图像;
(5)图像匹配:构建危险品标准图像,利用曲率的轮廓角点方法对待测增强边缘图像和危险品标准图像进行匹配,得到曲率角点的危险品判断结果;
(6)特征曲线检测:构建常见危险品特征曲线,同时采用无机物特征曲线方法对待测物体图像进行危险品检测匹配,得到曲线的危险品判断结果。
优选的,步骤(2)所述图像小波分解在二维情况下,需要尺度函数
其二维可分离方向敏感小波可表示为:
ψ
式中:ψ
优选的,所述可分离二维尺度和小波函数给定后,定义尺度和小波基函数,如下式:
式中:i={H,V,D}表示不同方向的小波;
则尺寸为M×N的f(x,y)离散小波变换为:
式中:j
优选的,步骤(3)所述小波重构公式如下:
优选的,步骤(4)所述孔洞填充公式如下:
式中:k=1,2,3...。
优选的,步骤(5)所述曲率的数学定义如下:在光滑弧上自点M开始取弧段,其长为Δs,对应切线转角为△α,定义弧段;
其中,△S上的平均曲率为:
点M处的曲率为:
其离散曲率用曲线参数方程计算公式如下:
优选的,步骤(5)所述曲率包括图像全局和局部曲率,其具体计算过程如下:
S1:计算各待测增强边缘图像轮廓的平均曲率;
S2:然后将轮廓平均曲率作为阈值,对当前轮廓点进行判断,若当前曲率小于阈值,则为真正轮廓角点;
S3:提取出所有待测增强边缘图像的角点后,并将待测增强边缘图像与危险品标准图像进行角点匹配;
所述角点匹配时构建角点特征描述子,其角点特征描述子定义为:假设P
B=(L
优选的,步骤(5)所述图像匹配具体步骤如下:
SS1:提取轮廓特征鲜明的完整的边缘图和危险品标准图像的真实角点;
SS2:利用式(14)分别求出每个待测增强边缘图像角点和危险品标准图像角点的描述子B和B′;
SS3:将待测增强边缘图像中每个角点描述子与危险品标准图像中所有角点描述子做顺序差值运算,若差值向量向量第一项与第二项比值小于阈值,阈值为0.5,则两幅图像的该对角点匹配,否则,不匹配;
SS4:统计同一目标轮廓角点匹配相似度百分比,若相似度大于预设值,则该物品为危险品。
优选的,步骤(6)所述特征曲线检测具体过程如下:
SSS1:通过X射线安检机获取待测物体图像的高低能灰度值,根据高低能灰度值绘制待测物体图像的特征曲线;
SSS2:构建常见危险品特征曲线,并将其作为检测危险品的标准;
SSS3:将待测物体图像的特征曲线与常见危险品特征曲线进行比较;若待测物体图像的特征曲线靠近危险品特征曲线,则判断该物品为危险品,反之,则判定正常。
相比于现有技术,本发明的有益效果在于:
1、本发明依据X射线探测器获取物体平均有效原子序数值,将检测对象分为两类,对于平均有效原子序数大于10的物体采用X射线图像进行形状检测和匹配,而对于平均有效原子序数小于10的目标,则利用其高低灰度值拟合的特征曲线与标准危险品的特征曲线进行匹配;通过两种方式相结合对危险品进行检测,可以较全面的检测出行李中携带的危险品,有利于提高危险品检测的效率,进而有利于降低安检人员的劳动强度。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
图1为本发明提出的一种危险品图形识别算法的整体流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1
一种危险品图形识别算法,该识别算法具体步骤如下:
(1)X射线探测:由X射线探测器获取待测物体图像平均有效原子序数值,若其值大于等于10时,则跳到步骤(2)对待测物体图像进行图像小波分解,若其值小于等于10时,则跳到步骤(6)对待测物体图像进行特征曲线检测;
(2)图像小波分解:采用小波分解方法对待测物体图像进行一层小波分解,每一层图像均被分解为低频和高频的小波系数矩阵,其中低频系数代表了图像的近似部分,而高频则包含了水平方向、垂直方向和对角线方向系数;
(3)图像小波重构:利用Canny算法对图像近似部分,即低频部分进行边缘检测,得到低频部分的子图像;同时利用Roberts和Sobel算法对图像水平方向、垂直方向和对角线方向系数,即高频部分进行边缘检测,得到高频部分的子图像;将低频部分的子图像和高频部分的子图像进行小波重构,得到边缘图像;
(4)形态学填充:利用孔洞填充方式对边缘图像进行形态学填充,得到待测增强边缘图像;
(5)图像匹配:构建危险品标准图像,利用曲率的轮廓角点方法对待测增强边缘图像和危险品标准图像进行匹配,得到曲率角点的危险品判断结果;
(6)特征曲线检测:构建常见危险品特征曲线,同时采用无机物特征曲线方法对待测物体图像进行危险品检测匹配,得到曲线的危险品判断结果。
步骤(2)图像小波分解在二维情况下,需要尺度函数
其二维可分离方向敏感小波可表示为:
ψ
式中:ψ
可分离二维尺度和小波函数给定后,定义尺度和小波基函数,如下式:
式中:i={H,V,D}表示不同方向的小波;
则尺寸为M×N的f(x,y)离散小波变换为:
式中:j
步骤(3)小波重构公式如下:
步骤(4)孔洞填充公式如下:
式中:k=1,2,3...。
步骤(5)曲率的数学定义如下:在光滑弧上自点M开始取弧段,其长为Δs,对应切线转角为△α,定义弧段;
其中,△S上的平均曲率为:
点M处的曲率为:
其离散曲率用曲线参数方程计算公式如下:
步骤(5)曲率包括图像全局和局部曲率,其具体计算过程如下:
S1:计算各待测增强边缘图像轮廓的平均曲率;
S2:然后将轮廓平均曲率作为阈值,对当前轮廓点进行判断,若当前曲率小于阈值,则为真正轮廓角点;
S3:提取出所有待测增强边缘图像的角点后,并将待测增强边缘图像与危险品标准图像进行角点匹配;
角点匹配时构建角点特征描述子,其角点特征描述子定义为:假设P
B=(L
步骤(5)图像匹配具体步骤如下:
SS1:提取轮廓特征鲜明的完整的边缘图和危险品标准图像的真实角点;
SS2:利用式(14)分别求出每个待测增强边缘图像角点和危险品标准图像角点的描述子B和B′;
SS3:将待测增强边缘图像中每个角点描述子与危险品标准图像中所有角点描述子做顺序差值运算,若差值向量向量第一项与第二项比值小于阈值,阈值为0.5,则两幅图像的该对角点匹配,否则,不匹配;
SS4:统计同一目标轮廓角点匹配相似度百分比,若相似度大于预设值,则该物品为危险品。
步骤(6)特征曲线检测具体过程如下:
SSS1:通过X射线安检机获取待测物体图像的高低能灰度值,根据高低能灰度值绘制待测物体图像的特征曲线;
SSS2:构建常见危险品特征曲线,并将其作为检测危险品的标准;
SSS3:将待测物体图像的特征曲线与常见危险品特征曲线进行比较;若待测物体图像的特征曲线靠近危险品特征曲线,则判断该物品为危险品,反之,则判定正常。
为了验证图像匹配效果,选取256×256大小的X射线危险品图像作为样本(样本包括手枪、手铐和手雷),采用Matlab7.1进行仿真,试验具体数据如下表:
实施例2
一种危险品图形识别算法,该识别算法具体步骤如下:
(1)X射线探测:由X射线探测器获取待测物体图像平均有效原子序数值,若其值大于等于10时,则跳到步骤(2)对待测物体图像进行图像小波分解,若其值小于等于10时,则跳到步骤(6)对待测物体图像进行特征曲线检测;
(2)图像小波分解:采用小波分解方法对待测物体图像进行一层小波分解,每一层图像均被分解为低频和高频的小波系数矩阵,其中低频系数代表了图像的近似部分,而高频则包含了水平方向、垂直方向和对角线方向系数;
(3)图像小波重构:利用Canny算法对图像近似部分,即低频部分进行边缘检测,得到低频部分的子图像;同时利用Roberts和Sobel算法对图像水平方向、垂直方向和对角线方向系数,即高频部分进行边缘检测,得到高频部分的子图像;将低频部分的子图像和高频部分的子图像进行小波重构,得到边缘图像;
(4)形态学填充:利用孔洞填充方式对边缘图像进行形态学填充,得到待测增强边缘图像;
(5)图像匹配:构建危险品标准图像,利用曲率的轮廓角点方法对待测增强边缘图像和危险品标准图像进行匹配,得到曲率角点的危险品判断结果;
(6)特征曲线检测:构建常见危险品特征曲线,同时采用无机物特征曲线方法对待测物体图像进行危险品检测匹配,得到曲线的危险品判断结果;
其余同实施例1。
为了利用验证特征曲线检测无机物危险品的效果,试验选取了不同厚度的鞭炮,通过建立的鞭炮特征曲线对鞭炮进行了检测,试验检测数据具体如下:
实施例3
一种危险品图形识别算法,该识别算法具体步骤如下:
(1)X射线探测:由X射线探测器获取待测物体图像平均有效原子序数值,若其值大于等于10时,则跳到步骤(2)对待测物体图像进行图像小波分解,若其值小于等于10时,则跳到步骤(6)对待测物体图像进行特征曲线检测;
(2)图像小波分解:采用小波分解方法对待测物体图像进行一层小波分解,每一层图像均被分解为低频和高频的小波系数矩阵,其中低频系数代表了图像的近似部分,而高频则包含了水平方向、垂直方向和对角线方向系数;
(3)图像小波重构:利用Canny算法对图像近似部分,即低频部分进行边缘检测,得到低频部分的子图像;同时利用Roberts和Sobel算法对图像水平方向、垂直方向和对角线方向系数,即高频部分进行边缘检测,得到高频部分的子图像;将低频部分的子图像和高频部分的子图像进行小波重构,得到边缘图像;
(4)形态学填充:利用孔洞填充方式对边缘图像进行形态学填充,得到待测增强边缘图像;
(5)图像匹配:构建危险品标准图像,利用曲率的轮廓角点方法对待测增强边缘图像和危险品标准图像进行匹配,得到曲率角点的危险品判断结果;
(6)特征曲线检测:构建常见危险品特征曲线,同时采用无机物特征曲线方法对待测物体图像进行危险品检测匹配,得到曲线的危险品判断结果;
其余同实施例1。
为了测试本发明的有效性,选取了包含刀具、玩具枪、瓶装酒精和汽油等几种物品作为测试样本,并将其分别单独与其他物品混装,并建立的危险品形状图像数据库(28种)和常见危险品特征曲线(15种)作为危险品判断标准,以不同方向和位置进行多次试验,其不同物品的检测准确率具体如下表:
从上述实施例1、实施例2和实施例3的数据表中可以看出,本发明对危险品物体检测准确率较高,而误检率和漏检率均在10%以下,因此,本发明可以较全面的检测出行李中携带的危险品,提高危险品检测的效率,从而有利于降低安检人员的劳动强度。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种危险品图形识别算法
- 一种基于深度学习图形识别算法的变电站智能摄像头